一种仿生刚柔耦合自激振动的双翼式深松机构
1.本发明涉及农业机械设计领域,具体涉及一种仿生刚柔耦合自激振动的双翼式深松机构。
背景技术:
2.深松作为保护性耕作中的一项关键技术,主要是指利用深松部件在不翻转土壤的前提下疏松土壤,进而实现打破犁底层、减轻土壤受风蚀、水蚀等影响产生肥力下降等不良影响,提高土壤蓄水保墒能力等目的。
3.近年来随着保护性耕作技术在东北黑土区的不断推广,各种深松装置层出不穷。但受到土壤板结过于严重,秸秆覆盖量过大等影响,现有深松装置都存在着耕作阻力大、机具作业能耗高以及耕深一致性较差等共性问题。因此发明一种可以有效降低作业阻力,减少能耗且深松效果优异的深松装置尤为重要。
4.野兔在野外环境中时刻处于捕食与被捕食的状态下,因此进化出具有高效土壤挖掘能力的爪趾与指甲。其韧带与关节可视为一种弹性系统,可为挖掘土壤时提供弹力并储存弹性势能;其用来连接支撑爪趾的趾骨可视为一种刚性连接。因此野兔挖掘土壤的过程即可视为一种刚柔耦合弹性系统,可有效降低其挖掘土壤时的阻力。这可为目前自激式振动深松装置提供设计思路,因此,可以结合野兔高效土壤挖掘能力开发一种刚柔耦合自激振动深松装置。
技术实现要素:
5.为解决背景技术中存在的问题,本发明提供一种仿生刚柔耦合自激振动的双翼式深松装置。
6.本发明的技术方案如下:
7.一种仿生刚柔耦合自激振动的双翼式深松机构,包括仿野兔爪趾双翼式深松铲、刚柔耦合深松弹性储能装置和限位装置,所述仿野兔爪趾双翼式深松铲包括铲尖和铲柄,所述铲尖为锥形双翼式结构,所述铲尖上分布有铲尖螺纹安装孔;所述铲柄为弧形平板结构,所述铲柄的底端分布有铲尖连接螺纹孔,螺栓依次通过所述铲尖螺纹安装孔、铲尖连接螺纹孔可以将铲尖安装在铲柄上,所述铲柄的顶端一体成型有带对称式铲柄法兰的铲柄安装孔;
8.所述刚柔耦合深松弹性储能装置包括第一连杆、第二连杆、第三连杆、第一转轴组件、第二转轴组件、第三转轴组件,所述第一连杆和第二连杆结构相同且对称设置,所述第一连杆的两个端面和第二连杆的两个端面上均开设有法兰孔,所述第三连杆的两端连杆孔上一体成型有对称式连杆法兰;
9.所述第一转轴组件包括第一转轴,所述第一转轴与铲柄安装孔过盈配合,邻近铲柄的第一转轴两侧分别套装有第一轴套和第一扭转弹簧,所述第一转轴的两端固定安装有第一深沟球轴承,两个所述第一深沟球轴承分别转动安装在第一连杆的一端连杆孔内、第
二连杆的一端连杆孔内,两个所述第一扭转弹簧的外侧端分别置于第一连杆的法兰孔内、第二连杆的法兰孔内,两个所述第一扭转弹簧的内侧端分别置于两侧的铲柄法兰的法兰孔内;
10.所述第二转轴组件包括第二转轴,所述第二转轴转动安装在第三连杆的一端连杆孔内,邻近第三连杆的第二转轴两侧套装有第二扭转弹簧,所述第二转轴两端固定右第二深沟球轴承,两个所述第二深沟球轴承分别转动安装在第一连杆的另一端连接孔内、第二连杆的另一端连接孔内,两个所述第二扭转弹簧的外侧端分别置于第一连杆的法兰孔内、第二连杆的法兰孔内,两个所述第二扭转弹簧的内侧端分别置于第三连杆上连杆法兰的法兰孔内;
11.所述第三转轴组件包括第三转轴,所述第三转轴转动安装在第三连杆的另一端连杆孔内,邻近第三连杆的第三转轴两侧套装有第二轴套和第三扭转弹簧,所述第三转轴的两端固定安装有第三深沟球轴承,两个所述第三深沟球轴承分别转动安装在连接法兰的安装孔内,所述连接法兰用于与深松机具安装,所述第三扭转弹簧的外侧端分别置于连接法兰的法兰孔内,所述第三扭转弹簧的内侧端分别置于第三连杆上连杆法兰的法兰孔内;
12.所述限位装置包括两根限位弹簧,两根所述限位弹簧的一端分别与两个第一轴套固定,两根所述限位弹簧的另一端分别与两个第二轴套固定。
13.作为本发明的优选,所述铲柄的前端铲刃截面曲线为野兔爪趾外侧拟合曲线,方程为y=3.02+6.27*e^(-x/2.33),x的取值范围为-9.5-1.25;后端铲底截面曲线为野兔爪趾部内侧曲线,方程为y=5.27+17.02*e^(-x/2.95),x的取值范围为-9.5-8。
14.作为本发明的优选,所述第一连杆的两个外侧端面、第二连杆的两个外侧端面均安装有连杆法兰端盖。
15.作为本发明的优选,两个所述连接法兰的外侧端面上均安装有连接法兰端盖。
16.作为本发明的优选,所述第一扭转弹簧、第二扭转弹簧、第三扭转弹簧的弹簧中径范围为8-12mm,弹簧刚度范围在190000-220000n/mm。
17.作为本发明的优选,所述第一转轴、第二转轴、第三转轴为直径5-15mm均匀变化,长度变化范围为210-270mm的阶梯状锰钢圆柱体,其中直径5mm段长度范围为30-50mm,位于两端,用于与带防尘盖的第一深沟球轴承、第二深沟球轴承、第三深沟球轴承连接;直径10mm段长度范围为140-160mm,用于设置第一扭转弹簧、第二扭转弹簧、第三扭转弹簧、第一轴套、第二轴套;直径15mm段长度范围为20-30mm之间,用于承载铲柄和第三连杆。
18.本发明的有益效果如下:
19.(1)本发明提供的仿生刚柔耦合自激振动的双翼式深松机构,结构简单,拆卸方便,可以通过刚柔耦合深松弹性储能装置实现振动减阻、复位与储能作用,可有效降低深松作业阻力。
20.(2)本发明提供的仿生刚柔耦合自激振动的双翼式深松机构,可以根据土壤类型及机具作业前进速度的实际需要调整扭转弹簧以及限位弹簧的预紧力,进而适应多种工作环境。
21.(3)本发明提供的仿生刚柔耦合自激振动的双翼式深松机构,与传统自激式深松铲只有单个铰接机构相比,具有三个弹性铰接机构,分别为第一扭转弹簧所在的位置、第二扭转弹簧所在的位置和第三扭转弹簧所在的位置,可更高效的进行储能并减少能耗,深松
铲工作阻力可减小15%-20%。
22.(4)本发明提供的仿生刚柔耦合自激振动的双翼式深松机构,铲刃截面与铲底截面曲线分别由野兔爪趾内外侧曲线拟合所得,四条曲线绘制呈了铲柄,适用于挖掘土壤,与传统双翼式深松装置相比可有效减阻20-25%。
23.(5)本发明提供的仿生刚柔耦合自激振动的双翼式深松机构,所涉及的限位装置可有效抑制深松铲运动过程中的摆动幅度,进而避免深松作业时产生无效功耗。
附图说明
24.通过参考以下结合附图的说明,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
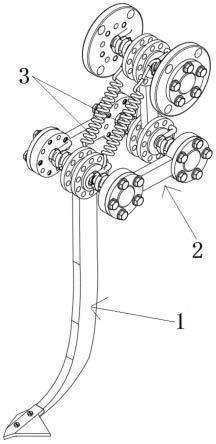
25.图1为本发明的三维轴侧图。
26.图2为本发明的侧视图。
27.图3为本发明的主视图。
28.图4为本发明的俯视图。
29.图5为本发明中仿野兔爪趾双翼式深松铲的结构示意图。
30.图6为本发明中刚柔耦合深松弹性储能装置示意图。
31.图7为本发明中第二连杆和第一转轴、第二转轴的装配示意图。
32.图8为本发明中第三连杆和第三转轴的装配示意图。
33.图9为本发明中第一转轴组件的结构示意图。
34.图10为本发明中限位装置与第一转轴、第三转轴的转配示意图。
35.其中的附图标记为:仿野兔爪趾双翼式深松铲1、刚柔耦合深松弹性储能装置2、限位装置3、铲尖11、铲柄12、螺栓13、铲尖螺纹安装孔111、铲尖连接螺纹孔121、铲柄法兰122、铲柄安装孔123、第一连杆21、第二连杆22、第三连杆23、第一转轴组件24、连杆法兰231、第一转轴241、第一轴套242、第一扭转弹簧243、第一深沟球轴承244、第二转轴251、第二扭转弹簧252、第三转轴261、第二轴套262、第三扭转弹簧263、连接法兰27、限位弹簧31、连杆法兰端盖28、连接法兰端盖29。
具体实施方式
36.为使本领域技术人员能够更好的理解本发明的技术方案及其优点,下面结合附图对本技术进行详细描述,但并不用于限定本发明的保护范围。
37.在本技术的描述中,需要说明的是,术语“内”、“外”、“上”、“下”等指示的方位或位置关系为:基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”、“第四”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
38.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。
对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
39.参阅图1-4所示:一种仿生刚柔耦合自激振动的双翼式深松机构,包括仿野兔爪趾双翼式深松铲1、刚柔耦合深松弹性储能装置2和限位装置3。
40.参阅图5所示:仿野兔爪趾双翼式深松铲1包括铲尖11和铲柄12,铲尖11为锥形双翼式结构,铲尖11上分布有铲尖螺纹安装孔;铲柄12为弧形平板结构,铲柄12的底端分布有铲尖连接螺纹孔,螺栓13依次通过铲尖螺纹安装孔、铲尖连接螺纹孔可以将铲尖11安装在铲柄12上,铲柄12的顶端一体成型有带对称式铲柄法兰122的铲柄安装孔123;
41.参阅图6和图8所示:刚柔耦合深松弹性储能装置2包括第一连杆21、第二连杆22、第三连杆23、第一转轴组件24、第二转轴组件、第三转轴组件,第一连杆21和第二连杆22结构相同且对称设置,第一连杆21的两个端面和第二连杆22的两个端面上均开设有法兰孔,第三连杆23的两端连杆孔上一体成型有对称式连杆法兰231;
42.参阅图9所示:第一转轴组件24包括第一转轴241,第一转轴241与铲柄安装孔123过盈配合(参阅图1),邻近铲柄12的第一转轴241两侧分别套装有第一轴套242和第一扭转弹簧243,第一转轴241的两端固定安装有第一深沟球轴承244,两个第一深沟球轴承244分别转动安装在第一连杆21的一端连杆孔内、第二连杆22的一端连杆孔内,两个第一扭转弹簧243的外侧端分别置于第一连杆21的法兰孔内、第二连杆22的法兰孔内,两个第一扭转弹簧243的内侧端分别置于两侧的铲柄法兰122的法兰孔内(参阅图6);
43.参阅图6和图7所示:第二转轴组件包括第二转轴251,第二转轴251转动安装在第三连杆23的一端连杆孔内,邻近第三连杆23的第二转轴251两侧套装有第二扭转弹簧252,第二转轴251两端固定有第二深沟球轴承,两个第二深沟球轴承分别转动安装在第一连杆21的另一端连接孔内、第二连杆22的另一端连接孔内,两个第二扭转弹簧252的外侧端分别置于第一连杆21的法兰孔内、第二连杆22的法兰孔内,两个第二扭转弹簧252的内侧端分别置于第三连杆23上连杆法兰231的法兰孔内(参阅图8);
44.参阅图6、图8、图10所示:第三转轴组件包括第三转轴261,第三转轴261转动安装在第三连杆23的另一端连杆孔内,邻近第三连杆23的第三转轴261两侧套装有第二轴套262和第三扭转弹簧263,第三转轴261的两端固定安装有第三深沟球轴承,两个第三深沟球轴承分别转动安装在连接法兰27的安装孔内,连接法兰27用于与深松机具安装,第三扭转弹簧263的外侧端分别置于连接法兰27的法兰孔内,第三扭转弹簧263的内侧端分别置于第三连杆23上连杆法兰231的法兰孔内;
45.参阅图10所示:限位装置3包括两根限位弹簧31,两根限位弹簧31的一端分别与两个第一轴套242固定,两根限位弹簧31的另一端分别与两个第二轴套262固定。
46.参阅图5所示:铲柄12的前端铲刃截面曲线为野兔爪趾外侧拟合曲线,方程为y=3.02+6.27*e^(-x/2.33),x的取值范围为-9.5-1.25;后端铲底截面曲线为野兔爪趾部内侧曲线,方程为y=5.27+17.02*e^(-x/2.95),x的取值范围为-9.5-8。
47.参阅图6所示:第一连杆21的两个外侧端面、第二连杆22的两个外侧端面均安装有连杆法兰端盖28;两个连接法兰27的外侧端面上均安装有连接法兰端盖29。
48.进一步地,第一扭转弹簧243、第二扭转弹簧252、第三扭转弹簧263的弹簧中径范围为8-12mm,弹簧刚度范围在190000-220000n/mm,其储能作用。
49.进一步地,第一转轴241、第二转轴251、第三转轴261为直径5-15mm均匀变化,长度
变化范围为210-270mm的阶梯状锰钢圆柱体,其中直径5mm段长度范围为30-50mm,位于两端,用于与带防尘盖的第一深沟球轴承244、第二深沟球轴承、第三深沟球轴承连接;直径10mm段长度范围为140-160mm,用于设置第一扭转弹簧243、第二扭转弹簧252、第三扭转弹簧263、第一轴套242、第二轴套262;直径15mm段长度范围为20-30mm之间,用于承载铲柄12和第三连杆23。
50.以下将参阅图1-10对本发明的工作原理进行说明:
51.深松作业前,先将第一扭转弹簧243、第二扭转弹簧252、第三扭转弹簧263的两个力臂调整安装至合适位置,使其产生合适的预紧力,从而使整个刚柔耦合深松弹性储能装置2处于平衡状态。将连接法兰27安装在机具上,铲尖11朝前方位置,第三连杆23与第一连杆21和第二连杆22形成的平面呈一定高度和一定角度,该高度和角度由土壤类型、机具前进速度以及第一扭转弹簧243、第二扭转弹簧252、第三扭转弹簧263的预紧力共同决定。深松作业时,由于土壤特性的不均匀性使得土壤阻力时刻发生变化,当土壤阻力大于第一扭转弹簧243的预紧力时,仿野兔爪趾双翼式深松铲1将与第一转轴241共同向后运动,此时,第一扭转弹簧243随着转动生产压缩形变,同时其反作用力带动第一连杆21和第二连杆22转动,从而使第一扭转弹簧243的反作用力被传递到第二扭转弹簧252,使第二扭转弹簧252产生压缩形变。同理,第三扭转弹簧263也产生压缩形变。此时,三处扭转弹簧均产生压缩形变,部分仿野兔爪趾双翼式深松铲1所受阻力消耗的能量储存于扭转弹簧中。当土壤阻力小于第一扭转弹簧243所受压力时,第一扭转弹簧243产生松弛形变,第一扭转弹簧243产生的反作用力将大于土壤阻力,推动仿野兔爪趾双翼式深松铲1向前转动,最终将储存在第一扭转弹簧243中的能量转化为该铲的工作动能。同理,第二扭转弹簧252和第三扭转弹簧263所储存的能量也被释放转化为该铲的工作动能。当该铲在作业过程中摆动幅度过大时,限位装置3会对铲柄12所连接的第一转轴241进行拉伸,从而限制该铲的无效摆动,进而避免产生无用功效。
52.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1