一种挖掘深度自动调控装置和方法与流程
1.本发明涉及一种大蒜联合收获机的挖掘深度调控装置,尤其是一种挖掘深度自动调控装置,同时还涉及基于深度学习的自动调控方法,属于信息技术应用于农机领域。
背景技术:
2.大蒜是重要的经济作物,其生产过程包括耕整地、播种、田间管理和收获等环节,其中收获环节用工量和劳动强度最大。为了提高收获效率,降低劳动成本,大蒜联合收获机成为研发的重点,而联合收获机挖掘深度的合理控制是保证收获质量的重要前提。因为,在挖掘收获过程中,挖掘铲的挖掘深度过深将增大机器的挖掘阻力,从而增加收获机的能耗,同时也增大了挖掘的难度;而挖掘深度过浅,则会损伤大蒜的鳞茎,甚至导致漏挖,造成不必要的经济损失。
3.检索可知,申请号201911322799 .5的中国发明专利文件展示了大蒜联合收获机的典型结构,并披露了其限深挖掘机构,该机构收获台架的前端装有支撑于两侧限深轮上的割台,割台下方装有前伸的挖掘铲、前端装有分禾装置和扶禾装置;挖掘铲与前挂杆和驱振板的下端铰接,前挂杆和驱振板的上端分别铰接于收获台架的下部,驱振板的中部与驱振杆的前端铰接,驱振杆的后端与动力源带动的偏心驱振轮传动连接;限深轮安装在朝后下倾的限深轮架下端,且位于振动挖掘铲的铲柄后方。收获作业时,振动挖掘铲的高频振动使破土挖掘更省力,可有效将蒜须部位的粘土振松;限深轮不仅起到限制挖掘深度的作用,而且可压住拖挂在挖掘铲柄上的地膜等杂物,有效避免地膜缠挂。然而该现有技术未能实现挖掘深度的自动调节,而挖掘深度控制不当将严重影响大蒜收获质量和效率,因为挖浅了必然会损伤鳞茎;挖深了不仅耗能高,而且带土严重。因此,收获时依然需要依赖操作者的经验,不断酌情手动调节挖掘深度。
技术实现要素:
4.本发明的目的在于:针对以上现技术存在的缺点,提出一种收获过程中自适应调节挖掘深度的挖掘深度自动调控装置,同时给出相应的调控方法,从而即避免铲伤鳞茎、又省去后续切根处理,显著提高大蒜收获质量和效率。
5.为了达到上述目的,本发明挖掘深度自动调控装置的基本技术方案为:包括后端铰装于收获机前部的收获台机架、固连于收获台机架前下部的l形前伸挖掘铲以及从挖掘铲上方起始沿收获台机架由低至高的夹持输送链;所述收获台机架铰装限深轮摇臂的后端,所述限深轮摇臂的前端装有可旋转的限深轮,所述限深轮摇臂的中部与动力推杆的一端铰接,所述动力推杆的另一端与收获台机架的前下端铰接;所述收获台机架装有朝向前侧大蒜鳞茎部位的工业相机,所述动力推杆一侧装有位移传感器;所述工业相机和位移传感器的信号输出端分别通过上位机和模/数转换模块与主控单元的相应信号端口连接,所述主控单元的控制输出端通过驱动电路接所述动力推
杆的受控端。
6.该装置的机械结构及传感控制设置使其工作时,上位机根据图像处理结果求得实际根须长度,并与设定期望根须长度比较,计算期望挖掘深度并将结果发送给主控单元,主控单元根据期望挖掘深度驱动动力推杆伸缩,即可保证挖掘深度的精确控制。
7.采用上述装置后,上位机进行挖掘深度自动调控包括以下基本步骤:第一步、设定挖掘深度最小值、期望根须长度、检测标志位为初始值;第二步、采集图像信息,在矩形检测区域中设置目标区域;第三步、判断图像信息是否检测到鳞茎,如否则进行第十一步;如是则进行下一步;第四步、判断鳞茎图像左上角像素坐标是否在目标区域内,如是则置检测标志位置为当前值,进行第十一步;如否则进行下一步;第五步、判断检测标志位是否为当前值,如是则进行下一步;如否则进行第十一步;第六步、判断图像信息是否检测到根须,如是则计算实际根须长度,进行下一步;如否则将期望根须长度作为挖掘深度调整值,进行第八步;第七步、判断期望根须长度与实际根须长度之差的绝对值是否大于预定值,如是则进行下一步;如否则进行第十步;第八步、将期望根须长度与实际根须长度之差作为挖掘深度调整值,并根据当前挖掘深度和挖掘深度调整值修订期望挖掘深度;第九步、将期望挖掘深度发送给主控单元,调控挖掘深度;第十步、置检测标志位置为初始值;第十一步、判断是否收到停车控制信息,如是则进行下一步;如否则返回第二步;第十二步、结束自动限深。
8.采用本发明后,能够智能、准确、自动的将挖掘深度调节至合适值,从而在避免铲伤鳞茎的同时,省去后续切根处理,显著提高大蒜收获质量和效率,减少能源浪费、降低收获成本。
9.本发明进一步的完善是,所述第六步中计算实际根须长度的过程为:根据接收到的鳞茎图像左上角像素坐标和右下角像素坐标以及根须图像左上角像素坐标和右下角像素坐标判断鳞茎与根须位置状态;当判断结果鳞茎与根须图像未重叠、未偏移重叠、偏移重叠时,分别按以下公式计算求得实际根须长度;h1=(yr2-yr1)
ꢀ×
ρ
×
d/fh2=(yr2-yr1+yr2-yg2)
ꢀ×
ρ
×
d/2fh3=cosω
×
(yr2-yr1+yr2-yg2)
ꢀ×
ρ
×
d/2f以上式中h1——鳞茎与根须图像未重叠的实际根须长度,单位mm;h2——鳞茎与根须图像未偏移重叠时的实际根须长度,单位mm;h3——鳞茎与根须图像偏移重叠时的实际根须长度,单位mm;yr1——根须图像左上角像素纵坐标,单位pixel;
yr2——根须图像右下角像素纵坐标,单位pixel;yg2——鳞茎图像右下角像素纵坐标,单位pixel;ρ——相机的像元尺寸,单位mm/pixel;d——相机的物距,单位mm;f——相机的焦距,单位mm;ω——鳞茎图像与根须图像重叠部分对角线的倾角,单位
°
。
10.这样,不仅能够减小样本标记时产生的误差,还可以降低蒜株倾斜时对根须测量结果的影响。
11.本发明更进一步的完善是,所述第九步中,主控单元调控挖掘深度的步骤为:步骤一、读取当前动力推杆伸长量,并根据当前动力推杆伸长量计算当前挖掘深度;步骤二、判断期望挖掘深度与当前挖掘深度之差是否大于正阈值,如是则控制动力推杆伸长,返回第一步;如否则进行下一步;步骤三、判断期望挖掘深度与当前挖掘深度之差是否小于负阈值,如是则控制动力推杆收缩,返回第一步;如否则进行下一步;步骤四、控制动力推杆停止,结束本次控制。
附图说明
12.下面结合附图对本发明作进一步的说明。
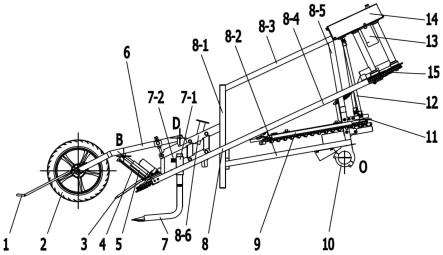
13.图1是本发明一个实施例的结构示意图。
14.图2是图1中挖深调控部分的机构简图。
15.图3是图1实施例作业状态结构示意图。
16.图4是图1实施例的电控原理框图。
17.图5(a)至图5(d)分别是大蒜的各种挖掘位置状态示意图。
18.图6是图1实施例的上位机设备检查流程图。
19.图7是图1实施例的主控单元动力推杆控制流程图。
20.图8是图1实施例的上位机实际根须长度的监控流程图。
具体实施方式
21.实施例一本实施例为一种基于深度学习的挖掘深度自动调控装置。如图1、图2和图3所示,收获台机架8包括前立杆8-1、上横杆8-3、后立杆8-5、下横杆8-2固连而成的支架框,其后下端通过抱箍10铰装于收获机前部的o处。前立杆8-1和后立杆8-5固连前低后高且前后延伸的输送梁8-4。输送梁8-4的前部固连带支紧螺钉7-2的垂向套管7-1,用于按所需高度安装固定l形前伸挖掘铲7。
22.输送梁8-4装有前端从挖掘铲7上方起始、由低至高的夹持输送链15。夹持输送链15的前端装有前伸的导秧杆3,中下方装有排序对齐装置9的输入端,该排序对齐装置9的输出端安装切秧刀盘11。
23.收获台机架8的上横杆8-3后端安装液压马达13驱动的传动箱14,该传动箱14的传
动轴12与夹持输送链15后端的驱动轮传动连接。收获台机架8的前立杆8-1中部固连有前伸的支撑杆8-6,该支撑杆8-6的中部d处铰装限深轮摇臂6的后端,限深轮摇臂6的前端a处装有可旋转的限深轮2以及前伸的分秧杆1,限深轮摇臂6的中部b处与动力推杆5的一端铰接,动力推杆5的另一端与收获台机架8的前下端铰接。
24.收获台机架8的前立杆8-1下部装有朝向前侧大蒜g鳞茎部位的工业相机16,动力推杆5的一侧装有位移传感器4。参见图4,车载24v蓄电池作为整车供电单元,通过12v降压模块为主控单元、并为驱动器中的动力推杆驱动电路供电。工业相机16接上位机17的相应信号端口,该上位机17通过rs232与电控箱18中的主控单元通讯连接,位移传感器4通过模/数转换模块与主控单元的相应信号端口通讯连接,从而可以分别将图像信号和位移信号传输给主控单元。主控单元的控制输出端通过驱动器中的动力推杆驱动电路接动力推杆的受控端。
25.本实施例的工业相机为迈德威视公司的mv-sua131gc-t型彩色工业相机。电控箱中的主控单元采用以stm32f103vet6芯片为核心的控制板并集成有采集板,其中控制板负责输出控制信号,采集板负责接收传感器采集的信息。由于采集的图像预先采用已成为现有技术的yolo v5(也可以是其它类似功能的基于深度学习软件算法)作目标检测,因此能够准确提取出目标区域。本实施例使用工业相机获取现场共1152幅图像,共标注鳞茎和根须两种目标。选取864幅图像作为训练集,288幅图像作为验证集使用。训练结束后,鳞茎和根须的平均精确度为99.5%。使用训练好的yolov5s模型检测效果如图5(a)至图5(d)所示,可以得到实线框代表的鳞茎区域,以及虚线框代表的根须区域。由此可见,训练好的模型能够较为准确的检测出对应目标。
26.工作时,参见图6,上位机首先按以下工步控制设备检查:工步一、向主控单元发送通信指令;工步二、判断主控单元反馈的通信指令是否与发送的通信指令一致,如否则发出排除相应故障警示信号,并返回第一步;如是则进行下一步;工步三、向主控单元发送传感信号采集指令;工步四、根据位移传感器监控界面判断位其工作是否正常,如否则发出排除相应故障警示信号,返回第一步;如是则进行下一步;工步五、结束设备检查,进行实际根须长度测控。
27.参见图8,上位机进行实际根须长度自动调控具体过程为:第一步、根据田间状况,设定防止漏挖的挖掘深度最小值;第二步、根据实际需要,设定期望根须长度;第三步、设置检测标志位为0;第四步、使能位移传感器;第五步、根据限深轮开关控制信号判断其是否着地,即挖掘装置是否到位,如是则进行下一步,如否则返回上一步,继续等待;第六步、启动自动限深系统;第七步、采集经yolo v5算法训练反馈的800
×
600像素图像;第八步、根据工业相机拍摄范围设置左上角像素坐标(100,0)和右下角像素坐标(550,600)的矩形检测区域,并将像素坐标(100,0)和像素坐标(200,600)的矩形区域作为
检测区域的目标区域;设置检测区域的目的是避免地面和挖掘装置支架对根须姿态造成影响,保证图像处理时的根须都是自然下垂状态;第九步、根据采集的图像信息判断是否检测到鳞茎,如否则进行第十八步;如是则进行下一步;第十步、判断鳞茎图像左上角像素坐标是否在检测区域的目标区域内,如是则置检测标志位置1,进行第十八步;如否则进行下一步;设置目标区域与检测标志位的目的是防止系统对同一株大蒜进行重复控制;第十一步、判断检测标志位是否为1,如是则进行下一步;如否则进行第十八步;第十二步、根据采集的图像信息判断是否检测到根须,如是则计算实际根须长度,进行下一步;如否则将期望根须长度作为挖掘深度调整值,进行第十五步;由于使用训练好的yolov5s模型检测效果实际存在如图5(a)至图5(d)所示的四种情况,因此需要根据接收到的鳞茎图像左上角像素坐标(xg1,yg1)和右下角像素坐标(xg2,yg2)以及根须图像左上角像素坐标(xr1,yr1)和右下角像素坐标(xr2,yr2)判断鳞茎与根须位置状态;当判断结果鳞茎与根须图像如图5(a)所示未重叠、如图5(b)所示未偏移重叠、以及如图5(c)和图5(d)所示偏移重叠时,分别按以下公式计算求得实际根须长度;h1=(yr2-yr1)
ꢀ×
ρ
×
d/fh2=(yr2-yr1+yr2-yg2)
ꢀ×
ρ
×
d/2fh3=cosω
×
(yr2-yr1+yr2-yg2)
ꢀ×
ρ
×
d/2f以上式中h1——鳞茎与根须图像未重叠的实际根须长度,单位mm;h2——鳞茎与根须图像未偏移重叠时的实际根须长度,单位mm;h3——鳞茎与根须图像偏移重叠时的实际根须长度,单位mm;yr1——根须图像左上角像素纵坐标,单位pixel;yr2——根须图像右下角像素纵坐标,单位pixel;yg2——鳞茎图像右下角像素纵坐标,单位pixel;ρ——相机的像元尺寸,单位mm/pixel;d——相机的物距,单位mm;f——相机的焦距,单位mm;ω——鳞茎图像与根须图像重叠部分对角线的倾角,单位
°
;第十三步、判断期望根须长度与实际根须长度之差的绝对值是否大于5mm,如是则进行下一步;如否则进行第十七步;第十四步、将期望根须长度与实际根须长度之差作为挖掘深度调整值;第十五步、结合当前挖掘深度和挖掘深度调整值计算期望挖掘深度;第十六步、将期望挖掘深度通过rs232通信发送给主控单元,调控挖掘深度;第十七步、置检测标志位置0;第十八步、判断是否收到停车控制信息,如是则进行下一步;如否则返回第七步;第十九步、关闭自动限深系统。
28.本实施例中,主控单元接收到上位机发送的期望挖掘深度信号后,如图7所示,按
以下具体步骤通过动力推杆调控挖掘深度:步骤一、接收上位机通过rs232通信发送的期望挖掘深度;步骤二、通过位移传感器读取当前动力推杆伸长量;步骤三、根据当前动力推杆伸长量计算当前挖掘深度(当前动力推杆伸长量与当前挖掘深度之间的关系可以根据图1所示机构的具体结构和尺寸推导相应的几何算式得到,故不展开详述);步骤四、判断期望挖掘深度与当前挖掘深度之差是否大于5mm,如是则控制动力推杆伸长,返回第二步;如否则进行下一步;步骤五、判断期望挖掘深度与当前挖掘深度之差是否小于-5mm,如是则控制动力推杆收缩,返回第二步;如否则控制动力推杆停止,进行下一步;步骤六、结束本次控制。
29.总之,在开启自动限深系统前,需对设备进行检查(参见图6),通过上位机监控界面发送通信指令给主控单元,如果通信正常,主控单元会返回通信指令给上位机;否则需要对故障进行排除。通信正常后,再对位移传感器进行检查,上位机向主控单元发送采集指令,观察位移传感器的返回值是否为当前液压缸伸长量,如否则需要对故障进行排除,如是则结束设备检查,进行挖掘深度自动调节。
30.例如,根据田间状况设定挖掘深度最小值为40mm,设定期望根须长度为10mm,使能位移传感器,等限深轮完全着地后开启自动限深系统,采集的图像分辨率大小为800
×
600,设置检测区域为左上角像素坐标(100,0)和右下角像素坐标(550,600)的矩形区域,检测区域的目标区域为左上角像素坐标(100,0)和右下角像素坐标(200,600)的矩形区域,yolov5算法检测到的鳞茎图像左上角像素坐标(236,214)和右下角像素坐标(466,382)以及根须图像左上角像素坐标(291,378)和右下角像素坐标(435,449),此时标志位为1。已知工业相机的像元尺寸ρ大小为6
×
10-3
mm/pixel,焦距f为7.18mm,物距d为350mm。
31.根据像素坐标可以得到鳞茎与根须处于未偏移重叠状态,因此采用h2公式(2)计算实际根须长度h,计算结果为20.18mm。根据期望根须长度h
exp
为10mm,算出期望根须长度h
exp
与实际根须长度h之差δh为-10.18mm,将δh作为挖掘深度调整值。通过位移传感器读取当前液压缸伸长量为22.33mm,根据液压缸伸长量,结合几何关系,计算出当前挖掘深度d为66.08mm,则此时期望挖掘深度d
exp
根据当前挖掘深度和挖掘深度调整值求出为55.90mm,上位机将期望挖掘深度55.90mm通过rs232通信发送给主控单元,之后将检测标志位置0,通过开关量判断是否停车,如是则关闭自动限深系统,如否则继续采集下一帧图像。
32.主控单元接收到上位机发送的期望挖掘深度55.90mm, 通过位移传感器读取当前液压缸伸长量,根据液压缸伸长量计算当前挖掘深度为66.08mm,控制液压缸收缩,直至当前挖掘深度在55.90
±
5mm范围内控制液压缸停止。
33.试验表明,采用本实施例后,可以有效避免铲伤鳞茎,且无需切根处理,显著提高了大蒜收获的质量和效率。
34.除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1