一种草料加工送料机器人及方法与流程
1.本技术涉及草料加工用设备技术领域,更具体地说,涉及一种草料加工送料机器人及方法。
背景技术:
2.在牛、羊等动物养殖过程时,为了减少草料的损耗,提高草料的适口性,通常会利用草料加工设备将草料制成草料颗粒进行投喂。在这个过程中,为了提高草料的加工效率,养殖户通常会利用草料加工送料机器人将粉碎后的草料投入颗粒机内。
3.如今普通养殖户所用的送料设备大多仅由传送带构成,虽然使用成本低廉,但是功能也相对简陋,普遍缺乏对草料中混杂的金属进行除去的功能。尽管市面上也有一些具备除金属能力的送料设备,但这些设备大多结构复杂,体积较大,很难在普通养殖户中得到应用。然而草料中混杂的金属不仅很可能会损伤颗粒机等草料加工设备,牛羊误食后还会造成牛羊受伤,严重影响牛羊的健康成长,导致养殖户蒙受经济损失。
4.鉴于此,我们提出一种草料加工送料机器人及方法。
技术实现要素:
5.1.要解决的技术问题
6.本技术的目的在于提供一种草料加工送料机器人及方法,解决了现有技术中独权能解决的技术问题,实现了技术效果。
7.2.技术方案
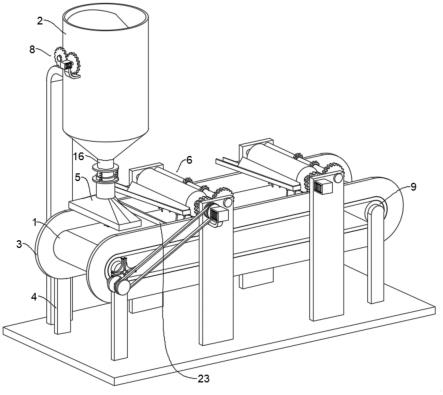
8.一种草料加工送料机器人,包括固定座4、输送带1以及处理桶2,所述固定座4上转动连接有两个带动辊9,所述固定座4上还安装有转动机构,所述转动机构能够带动其中一个带动辊9转动,所述带动辊9与输送带1摩擦传动,所述固定座4上还安装有两个防护板3,两个所述防护板3呈对称结构设置于输送带1的左右两侧,两个所述防护板3之间还固定连接有限高板23,所述输送带1与防护板3滑动配合,所述处理桶2内安装有粉碎设备8,所述处理桶2的下端固定连接有出料管16,所述输送带1的一侧安装有若干个筛选组件6,所述筛选组件6均包括安装架601,所述安装架601上安装有用于除去草料内部金属的磁铁602,所述磁铁602均设置于所述输送带1上方。
9.通过采用上述技术方案,待加工的草料投入处理桶2经粉碎设备8粉碎后,通过出料管16落至输送带1上,在转动机构的作用下,输送带1携粉碎后的草料向指定方向移动,当草料经过磁铁602时,草料内的金属随即被磁铁602吸附。
10.作为本技术文件技术方案的一种可选方案,所述安装架601上还固定安装有第二电动机611,所述第二电动机611的输出端端部固定连接有带动杆604,所述带动杆604的端部穿过安装架601并延伸至输送带1的上方,所述磁铁602套接在带动杆604外侧。
11.通过采用上述技术方案,在第二电动机611的作用下,带动杆604带动磁铁602进行转动,使得磁铁602各个位置能够均匀的与草料靠近,有效避免了磁铁602某一位置吸附过
多金属导致除金属能力下降。
12.作为本技术文件技术方案的一种可选方案,所述安装架601上还固设有收集盒605,所述收集盒605呈倾斜结构设置,所述收集盒605内还固定安装有刮板603,所述刮板603与磁铁602滑动配合。
13.通过采用上述技术方案,在磁铁602进行转动的过程中,由于刮板603与磁铁602滑动配合,磁铁602上的金属随即被刮下并落至收集盒605内。这不仅给工作人员带来了便利,而且能够保证磁铁602对草料中金属进行吸附的能力。
14.作为本技术文件技术方案的一种可选方案,所述磁铁602的一侧还安装有驱动机构以及承载板614,所述承载板614上可转动的穿设有若干个均匀分布的带动柱612,所述带动柱612上安装有两个对称设置的翻动杆615,所述驱动机构能够带动带动柱612转动。
15.通过采用上述技术方案,在驱动机构的作用下,带动柱612会带动翻动杆615进行转动,对草料进行翻动,使得各个位置的草料都能够接近磁铁602,有效避免金属残留在下方的草料内。
16.作为本技术文件技术方案的一种可选方案,所述驱动机构包括可转动的穿设在安装架601上的转动柱607和套接在带动杆604上的主动齿轮610,所述带动柱612的顶端均套接有第一锥齿轮613,所述转动柱607上套接有与所述主动齿轮610啮合传动的从动齿轮609,所述转动柱607上还套接有若干个与第一锥齿轮613一一对应设置的第二锥齿轮608,所述第一锥齿轮613与相应的第二锥齿轮608啮合配合。
17.通过采用上述技术方案,在带动杆604转动时,主动齿轮610跟随转动,转动柱607带动第二锥齿轮608转动,第一锥齿轮613进而带动带动柱612转动。
18.作为本技术文件技术方案的一种可选方案,所述带动柱612的外侧均套设有齿盘616,所述齿盘616连接固定于所述承载板614的下侧壁,所述翻动杆615的内端均套接有连接齿轮617,所述翻动杆615受限于带动柱612并与其转动连接,所述连接齿轮617均与齿盘616啮合连接。
19.通过采用上述技术方案,在带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,由于翻动杆615受限于带动柱612并与其转动连接且连接齿轮617与齿盘616啮合连接,翻动杆615还会绕其自身轴线位置进行自转,从而对草料进行充分的翻动,进一步保证草料内的金属能够被磁铁602完全除去。
20.作为本技术文件技术方案的一种可选方案,所述转动机构包括与其中一个带动辊9固定连接的槽轮7、转动连接在固定座4上的拨动杆15以及套接在带动杆604上的第一传动轮12,所述拨动杆15与槽轮7滑动配合,所述拨动杆15上固定连接有第二传动轮10,所述第二传动轮10上套设有皮带13,所述第一传动轮12及第二传动轮10均与皮带13摩擦传动。
21.通过采用上述技术方案,在带动杆604带动第一传动轮12转动时,在皮带13的连接作用下,第二传动轮10随即带动拨动杆15转动,在拨动杆15的拨动下,槽轮7带动相应的带动辊9间歇性的进行转动,使得输送带1间歇性的带动草料向指定方向移动,从而保证输送带1上的草料与磁铁602有足够的接触时间,进而充分除去草料内掺杂的金属。
22.作为本技术文件技术方案的一种可选方案,所述出料管16上套设有分布管5,所述分布管5呈梯形结构设置,所述分布管5下端密布有出料孔501,所述分布管5的内部固设有多个引导板19,所述引导板19呈倾斜结构且对称的安装在分布管5两侧,所述处理桶2内还
安装有第三电动机11,所述第三电动机11的输出端端部连接有主动杆14,所述主动杆14上套接有绞龙叶片22。
23.通过采用上述技术方案,在第三电动机11的作用下,主动杆14带动绞龙叶片22进行转动,粉碎后的草料均匀定量的落至分布管5上方,在引导板19的引导下,通过出料孔501均匀的撒向输送带1,有效免草料在输送带1某一位置堆积,有利于对草料内的金属进行筛除。
24.作为本技术文件技术方案的一种可选方案,所述分布管5受限于出料管16并与其滑动连接,所述分布管5一侧还安装有振荡机构,所述振荡机构能够带动分布管5进行上下振荡,所述振荡机构包括固定安装在分布管5下端的带动套21,所述带动套21的下端面呈斜面圆柱形结构设置,所述主动杆14的下端部依次穿过分布管5及带动套21并延伸至其下侧,所述主动杆14的端部固定连接有驱动柱20,所述驱动柱20的顶端与带动套21的下端面滑动连接,所述出料管16与分布管5之间连接有若干个弹簧17。
25.通过采用上述技术方案,在主动杆14带动驱动柱20转动时,由于驱动柱20与带动套21滑动连接且带动套21呈斜面圆柱形结构设置,因此带动套21会带动分布管5进行上下振荡,有效避免出料孔501堵塞,保证分布管5内的草料能够顺利的洒向输送带1。
26.本发明的目的还在于提供一种草料加工送料方法,包括以下步骤:
27.投入处理桶2内的待加工的草料经粉碎设备8粉碎并在绞龙叶片22的作用下,均匀定量的落入分布管5中,在引导板19的引导下,粉碎后的草料均匀的分散到分布管5的底部,此时,带动套21带动分布管5进行上下振荡,破碎后的草料随即均匀的落在输送带1上;
28.在拨动杆15的拨动下,槽轮7带动相应的带动辊9做间歇性转动,使得输送带1间歇性的带动草料向指定方向移动,磁铁602吸取草料内掺杂的金属,其中,在第二电动机611的作用下,磁铁602转动,磁铁602不同位置均匀的对金属进行吸附,当磁铁602上的金属与刮板603接触时,金属随即通过刮板603滑落至收集盒605内;
29.同时,在带动杆604转动时,主动齿轮610跟随转动,转动柱607带动第二锥齿轮608转动,第一锥齿轮613带动带动柱612及翻动杆615进行转动,在此过程中,由于翻动杆615受限于带动柱612并与其转动连接且连接齿轮617与齿盘616啮合连接,因此在带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,翻动杆615还会绕其自身轴线位置进行自转,进而对草料进行充分的翻动。
30.3.有益效果
31.本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
32.1、本技术通过设置输送带以及磁铁,在养殖人员对草料进行加工的过程中,能够对草料中混杂的金属进行除去,避免这些金属对牛、羊等养殖动物造成伤害,而且本技术结构简单,使用方便,易于在普通养殖户中推广使用。
33.2、本技术通过设置带动杆以及第二电动机,能够带动磁铁进行转动,使得磁铁各个位置能够均匀的靠近草料,避免磁铁某一位置吸附过多金属导致除金属能力下降,同时还通过设置刮板及收集盒,能够直接将磁铁上吸附的金属收集至收集盒内,充分保证磁铁对草料中金属进行吸附的能力。
34.3、本技术通过设置带动柱、翻动杆以及驱动机构,能够对输送带上的草料进行翻动,有效避免金属残留在草料下方,同时还通过设置齿盘及连接齿轮,使得翻动杆在绕带动
柱轴线位置转动的同时还能够绕翻动杆轴线位置进行自转,使得输送带上的草料能够被翻动的更加彻底,进一步保证草料内的金属能够被磁铁完全除去。
35.4、本技术技术方案通过设置槽轮以及拨动杆,使输送带间歇性的带动草料向指定方向移动,从而保证输送带上的草料与磁铁有足够的接触时间,进而充分除去草料内掺杂的金属。
36.5、本技术技术方案通过设置绞龙叶片以及引导板,使得粉碎后的草料能够通过出料孔均匀的撒布在输送带上,避免草料在输送带某一位置堆积,有利于对草料内的金属进行去除,同时还通过设置带动套、驱动柱以及弹簧,使得分布管能够进行上下振荡,有效避免出料孔堵塞,保证分布管内的草料能够顺利的洒向输送带。
附图说明
37.图1为本技术优选实施例公开的草料加工送料机器人的整体结构示意图;
38.图2为本技术优选实施例公开的草料加工送料机器人中筛选组件的结构示意图;
39.图3为本技术优选实施例公开的草料加工送料机器人中磁铁一侧的部分结构示意图;
40.图4为本技术优选实施例公开的草料加工送料机器人中转动机构的结构示意图;
41.图5为本技术优选实施例公开的草料加工送料机器人中处理桶、分布管以及出料管的结构剖视示意图;
42.图6为本技术优选实施例公开的草料加工送料机器人中a处结构的放大示意图。
43.图中附图标记为:
44.1、输送带;2、处理桶;3、防护板;4、固定座;5、分布管;6、筛选组件;7、槽轮;8、粉碎设备;9、带动辊;10、第二传动轮;11、第三电动机;12、第一传动轮;13、皮带;14、主动杆;15、拨动杆;16、出料管;17、弹簧;18、导料板;19、引导板;20、驱动柱;21、带动套;22、绞龙叶片;23、限高板;
45.501、出料孔;
46.601、安装架;602、磁铁;603、刮板;604、带动杆;605、收集盒;607、转动柱;608、第二锥齿轮;609、从动齿轮;610、主动齿轮;611、第二电动机;612、带动柱;613、第一锥齿轮;614、承载板;615、翻动杆;616、齿盘;617、连接齿轮;
47.801、驱动齿轮;802、第一电动机;803、粉碎辊。
具体实施方式
48.为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本发明一部分实施例,而不是全部的实施例。
49.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.下面通过参考附图描述的实施例以及方位性的词语均是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
51.在本发明的一个宽泛实施例中,一种草料加工送料机器人,包括固定座4、输送带1和处理桶2,所述固定座4上转动连接有两个带动辊9,所述带动辊9与输送带1摩擦传动,所述处理桶2内安装有粉碎设备8,所述处理桶2的下端固定连接有出料管16,所述输送带1的一侧安装有若干个筛选组件6,所述筛选组件6包括设置于所述输送带1上方的磁铁602,当草料经过磁铁602时,草料内的金属随即被磁铁602吸附。
52.优选的,所述筛选组件6包括安装架601,所述安装架601上固定安装有第二电动机611,所述第二电动机611的输出端端部固定连接有带动杆604,所述带动杆604的端部穿过安装架601并延伸至输送带1的上方,所述磁铁602套接在带动杆604外侧。
53.优选的,所述磁铁602的一侧还安装有驱动机构以及承载板614,所述承载板614上可转动的穿设有若干个均匀分布的带动柱612,所述带动柱612上安装有两个对称设置的翻动杆615,所述驱动机构包括可转动的穿设在安装架601上的转动柱607和套接在带动杆604上的主动齿轮610,所述带动柱612的顶端均套接有第一锥齿轮613,所述转动柱607上套接有与所述主动齿轮610啮合传动的从动齿轮609,所述转动柱607上还套接有若干个与第一锥齿轮613一一对应设置的第二锥齿轮608,所述第一锥齿轮613与相应的第二锥齿轮608啮合配合。
54.优选的,所述带动柱612的外侧均套设有齿盘616,所述齿盘616连接固定于所述承载板614的下侧壁,所述翻动杆615的内端均套接有连接齿轮617,所述翻动杆615受限于带动柱612并与其转动连接,所述连接齿轮617均与齿盘616啮合连接。
55.优选的,所述安装架601上还固设有收集盒605,所述收集盒605呈倾斜结构设置,所述收集盒605内还固定安装有刮板603,所述刮板603与磁铁602滑动配合。
56.优选的,所述固定座4上还安装有转动机构,所述转动机构能够带动其中一个带动辊9转动,所述转动机构包括与其中一个带动辊9固定连接的槽轮7、转动连接在固定座4上的拨动杆15以及套接在带动杆604上的第一传动轮12,所述拨动杆15与槽轮7滑动配合,所述拨动杆15上固定连接有第二传动轮10,所述第二传动轮10上套设有皮带13,所述第一传动轮12及第二传动轮10均与皮带13摩擦传动。
57.优选的,所述出料管16上套设有分布管5,所述分布管5呈梯形结构设置,所述分布管5下端密布有出料孔501,所述分布管5的内部固设有多个引导板19,所述引导板19呈倾斜结构且对称的安装在分布管5两侧,所述处理桶2内还安装有第三电动机11,所述第三电动机11的输出端端部连接有主动杆14,所述主动杆14上套接有绞龙叶片22。
58.优选的,所述分布管5受限于出料管16并与其滑动连接,所述分布管5一侧还安装有振荡机构,所述振荡机构能够带动分布管5进行上下振荡,所述振荡机构包括固定安装在分布管5下端的带动套21,所述带动套21的下端面呈斜面圆柱形结构设置,所述主动杆14的下端部依次穿过分布管5及带动套21并延伸至其下侧,所述主动杆14的端部固定连接有驱动柱20,所述驱动柱20的顶端与带动套21的下端面滑动连接,所述出料管16与分布管5之间连接有若干个弹簧17。
59.优选的,所述固定座4上还安装有两个防护板3,两个所述防护板3呈对称结构设置于输送带1的左右两侧,两个所述防护板3之间还固定连接有限高板23,所述输送带1与防护板3滑动配合。
60.本发明的目的还在于提供一种草料加工送料方法,包括以下步骤:
61.待加工草料经粉碎设备8粉碎并在绞龙叶片22的作用下均匀定量的落入分布管5中,在引导板19的引导下,粉碎后的草料均匀的分散到分布管5的底部,此时,带动套21带动分布管5进行上下振荡,破碎后的草料随即均匀的落在输送带1上;
62.与此同时,在拨动杆15的拨动下,槽轮7带动相应的带动辊9做间歇性转动,使得输送带1间歇性的带动草料输送至磁铁602的下方以除去其中掺杂的金属,其中,在第二电动机611的作用下,磁铁602转动,磁铁602的不同位置均匀的对金属进行吸附,当磁铁602上的金属与刮板603接触时,金属随即通过刮板603滑落至收集盒605内;
63.同时,主动齿轮610跟随带动杆604转动,转动柱607带动第二锥齿轮608转动,第一锥齿轮613带动带动柱612及翻动杆615转动,在此过程中,带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,翻动杆615亦绕其自身轴线位置进行自转,进而对草料进行充分的翻动。
64.下面结合附图,列举本发明的优选实施例,对本发明作进一步的详细说明。
65.参照图1、图4和图5,一种草料加工送料机器人,包括固定座4、输送带1以及处理桶2,固定座4上转动连接有两个带动辊9,固定座4上还安装有转动机构,转动机构能够带动其中一个带动辊9转动,带动辊9与输送带1摩擦传动,固定座4上还安装有两个防护板3,两个所述防护板3呈对称结构设置于输送带1的左右两侧,两个防护板3之间还固定连接有限高板23,限高板23的设置能够避免草料堆积过高随意洒落,同时也能避免草料过厚,不便于对草料中的金属进行筛除,输送带1与防护板3滑动配合,处理桶2内安装有粉碎设备8,粉碎设备8包括固定安装在处理桶2上的第一电动机802以及转动连接在处理桶2内的两个粉碎辊803,第一电动机802输出端端部与其中一个粉碎辊803连接固定,粉碎辊803上还固定连接有驱动齿轮801,两个驱动齿轮801连接,处理桶2内还安装有两个用于引导草料的导料板18,导料板18呈倾斜结构设置,便于保证草料能够顺利落入两个粉碎辊803之间,保证草料能够得到充分粉碎,处理桶2下端固定连接有出料管16,输送带1一侧安装有筛选组件6,筛选组件6可设置为多个,多个筛选组件6的设置能够有效提高金属被完全除去的概率,筛选组件6包括安装架601,安装架601上安装有用于除去草料内部金属的磁铁602,磁铁602安装在输送带1上方,转动机构包括与其中一个带动辊9固定连接的槽轮7、转动连接在固定座4上的拨动杆15以及套接在带动杆604上的第一传动轮12,拨动杆15与槽轮7滑动配合,拨动杆15上固定连接有第二传动轮10,第二传动轮10上套设有皮带13,第一传动轮12及第二传动轮10均与皮带13摩擦传动。
66.当工作人员将草料投入处理桶2后,在导料板18的引导下,草料进入两个粉碎辊803之间,在第一电动机802的作用下,相应的粉碎辊803及驱动齿轮801转动,由于两个驱动齿轮801啮合连接,因此两个粉碎辊803将进行相向转动,对草料进行破碎。破碎后的草料随即落在输送带1上,在拨动杆15的拨动下,槽轮7带动相应的带动辊9间歇性的进行转动,使得输送带1间歇性的带动草料向指定方向移动,磁铁602随即对草料内掺杂的金属进行除去。
67.参照图1和图2,安装架601上还固定安装有第二电动机611,第二电动机611输出端端部固定连接有带动杆604,带动杆604端部穿过安装架601并延伸至输送带1的上方,磁铁602套接在带动杆604外侧,安装架601上还固设有收集盒605,收集盒605呈倾斜结构设置,这样设置的目的是使得收集盒605内的金属能够自动向一侧滑落,便于工作人员对其进行
清理,收集盒605内还固定安装有刮板603,刮板603与磁铁602滑动配合。
68.在第二电动机611的作用下,磁铁602转动,磁铁602不同位置均匀的对金属进行吸附,当磁铁602上的金属与刮板603接触时,金属随即通过刮板603滑落至收集盒605内。
69.参照图2和图3,磁铁602一侧还安装有驱动机构以及承载板614,承载板614上可转动的穿设有若干个均匀分布的带动柱612,带动柱612上安装有两个对称设置的翻动杆615,驱动机构能够带动带动柱612转动,驱动机构包括可转动的穿设在安装架601上的转动柱607、套接在带动杆604上的主动齿轮610以及套接在带动柱612上的第一锥齿轮613,转动柱607上套接有从动齿轮609,主动齿轮610与从动齿轮609啮合连接,转动柱607上还套接有若干个第二锥齿轮608,第一锥齿轮613与相应的第二锥齿轮608啮合配合,带动柱612的外侧还套设有齿盘616,齿盘616与承载板614连接固定,翻动杆615上套接有连接齿轮617,翻动杆615受限于带动柱612并与其转动连接,连接齿轮617与齿盘616啮合连接。
70.在带动杆604转动时,主动齿轮610跟随转动,由于主动齿轮610与从动齿轮609啮合连接,因此转动柱607会带动第二锥齿轮608转动,又由于第一锥齿轮613与相应的第二锥齿轮608啮合配合,因此第一锥齿轮613会带动带动柱612及翻动杆615进行转动。在此过程中,由于翻动杆615受限于带动柱612并与其转动连接且连接齿轮617与齿盘616啮合连接,因此在带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,翻动杆615还会绕其自身轴线位置进行自转,从而对草料进行充分的翻动,保证草料内的金属能够被磁铁602完全除去。
71.参照图1和图5,出料管16上套设有分布管5,分布管5呈梯形结构设置,分布管5下端密布有出料孔501,分布管5上固设有多个引导板19,引导板19呈倾斜结构且对称的安装在分布管5两侧,引导板19的设置有利于粉碎后的草料均匀的落在分布管5下侧,并通过出料孔501均匀的撒向输送带1,处理桶2内还安装有第三电动机11,第三电动机11输出端端部连接有主动杆14,主动杆14上套接有绞龙叶片22,绞龙叶片22的设置有利于粉碎后的草料均匀、定量的被输送至分布管5上侧。
72.在第三电动机11的作用下,主动杆14带动绞龙叶片22转动,粉碎后的草料均匀定量的落至分布管5上方,在引导板19的引导下,通过出料孔501均匀的撒向输送带1。
73.参照图5和图6,分布管5受限于出料管16并与其滑动连接,分布管5一侧还安装有振荡机构,振荡机构能够带动分布管5进行上下振荡,振荡机构包括固定安装在分布管5下端的带动套21,带动套21的下端面呈斜面圆柱形结构设置,主动杆14端部穿过分布管5及带动套21并延伸至其外侧,主动杆14端部固定连接有驱动柱20,驱动柱20与带动套21滑动连接,出料管16与分布管5之间固定连接有若干个弹簧17,弹簧17的设置能够有效避免分布管5遭到卡涩,有利于分布管5进行复位。
74.在主动杆14带动驱动柱20转动时,由于驱动柱20与带动套21滑动连接且带动套21呈斜面圆柱形结构设置,因此带动套21会带动分布管5进行上下振荡。
75.草料加工送料机器人的方法,包括以下步骤:
76.s1、由工作人员将待加工的草料投入处理桶2内,经粉碎设备8粉碎后,在第三电动机11的作用下,主动杆14带动绞龙叶片22转动,粉碎后的草料均匀定量的落至分布管5上方,在引导板19的引导下,粉碎后的草料均匀的落在分布管5下侧,在主动杆14带动驱动柱20转动时,由于驱动柱20与带动套21滑动连接且带动套21呈斜面圆柱形结构设置,因此带
动套21会带动分布管5进行上下振荡,破碎后的草料随即均匀的落在输送带1上;
77.s2、在拨动杆15的拨动下,槽轮7带动相应的带动辊9间歇性的进行转动,使得输送带1间歇性的带动草料向指定方向移动,磁铁602随即对草料内掺杂的金属进行除去;
78.s3、在第二电动机611的作用下,磁铁602转动,磁铁602不同位置均匀的对金属进行吸附,当磁铁602上的金属与刮板603接触时,金属随即通过刮板603滑落至收集盒605内;
79.s4、在带动杆604转动时,主动齿轮610跟随转动,由于主动齿轮610与从动齿轮609啮合连接,因此转动柱607会带动第二锥齿轮608转动,又由于第一锥齿轮613与相应的第二锥齿轮608啮合配合,因此第一锥齿轮613会带动带动柱612及翻动杆615进行转动;
80.s5、在此过程中,由于翻动杆615受限于带动柱612并与其转动连接且连接齿轮617与齿盘616啮合连接,因此在带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,翻动杆615还会绕其自身轴线位置进行自转,从而对草料进行充分的翻动,保证草料内的金属能够被磁铁602完全除去。
81.本技术实施例一种草料加工送料机器人实施原理为:
82.当工作人员在对草料进行加工的过程中,需要除去草料中的金属时,首先由工作人员将草料投入处理桶2内,在导料板18的引导下,草料进入两个粉碎辊803之间,在第一电动机802的作用下,相应的粉碎辊803及驱动齿轮801转动,由于两个驱动齿轮801啮合连接,因此两个粉碎辊803将进行相向转动,对草料进行破碎。
83.在第三电动机11的作用下,主动杆14带动绞龙叶片22转动,粉碎后的草料均匀定量的落至分布管5上方,在引导板19的引导下,粉碎后的草料均匀的落在分布管5下侧,在主动杆14带动驱动柱20转动时,由于驱动柱20与带动套21滑动连接且带动套21呈斜面圆柱形结构设置,因此带动套21会带动分布管5进行上下振荡,破碎后的草料随即均匀的落在输送带1上。
84.在拨动杆15的拨动下,槽轮7带动相应的带动辊9间歇性的进行转动,使得输送带1间歇性的带动草料向指定方向移动,磁铁602随即对草料内掺杂的金属进行除去。
85.在第二电动机611的作用下,磁铁602转动,磁铁602不同位置均匀的对金属进行吸附,当磁铁602上的金属与刮板603接触时,金属随即通过刮板603滑落至收集盒605内。
86.在带动杆604转动时,主动齿轮610跟随转动,由于主动齿轮610与从动齿轮609啮合连接,因此转动柱607会带动第二锥齿轮608转动,又由于第一锥齿轮613与相应的第二锥齿轮608啮合配合,因此第一锥齿轮613会带动带动柱612及翻动杆615进行转动。在此过程中,由于翻动杆615受限于带动柱612并与其转动连接且连接齿轮617与齿盘616啮合连接,因此在带动柱612带动翻动杆615绕带动柱612轴线位置进行转动的同时,翻动杆615还会绕其自身轴线位置进行自转,从而对草料进行充分的翻动,保证草料内的金属能够被磁铁602完全除去。如此,即可在输送草料的过程中完成对草料中残存金属进行除去的操作。
87.最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1