一种水陆两栖可跨塘作业的无人投饵船的制作方法
1.本发明设计投饵船技术领域,尤其是涉及一种水陆两栖可跨塘作业的无人投饵船。
背景技术:
2.传统的虾蟹养殖,因虾蟹水下行走缓慢,需要人工驾船遍历养殖水塘进行投喂。这种传统的人工投饵喂食方法,作业强度大,工作效率低,而且人工撒料,饵料投放的均匀性不能保证。
3.近年来,随着无人船技术的发展,逐渐出现了一些无人投饵船来替代人工投饵作业。
4.如公开号为cn113060248a的中国专利文献公开了一种浮动式无人投饵船,包括船身组件、船舱组件、抛料组件;船身组件包括:两个浮体结构、连接两个浮体结构的支撑结构以及设于浮体结构后侧的充电结构,船舱组件包括:可拆卸地连接在支撑架上的物料仓;抛料组件包括:设置于安装口中的上料装置、设置于抛料口内侧的抛料装置。
5.公开号为cn110235837a的中国专利文献公开了一种智能投饵无人船装置,包括船身、动力驱动系统、投料系统和智能控制系统,所述动力驱动系统根据智能控制系统自主规划的线路进行巡航;投料系统包括颗粒类饵料投放装置和粉末类饵料投放装置,颗粒类饵料投放装置和粉末类饵料投放装置均在智能控制系统控制下实现定量投放。
6.相比较人工投饵,无人操控投饵船减少了人工投饵的人力分配,解决了水上的人身安全问题,并提高了作业效率。但已有的这些无人投饵船只能在一个水塘里工作,而且作业完毕后,需要在塘边进行人工固定。
技术实现要素:
7.本发明提供了一种水陆两栖可跨塘作业的无人投饵船,在自主投饵作业完成后,可以开上陆地,转入下一个水塘继续作业,也可以在陆地行驶到指定地点停止,不再需要人工对船只进行系缆固定。
8.一种水陆两栖可跨塘作业的无人投饵船,包括:
9.船体,由底部船舱、甲板和料仓组成;所述的料仓呈倒锥体结构,固定在甲板上设置的中间开口处;料仓的上方敞开,用于放置饵料;
10.驱动轮,对称设置在船体两侧,并内嵌于船体外壁,数量为4个;
11.明轮,对称设置在船体两侧、两个驱动轮之间上部的位置;所述的明轮外贴于船体外壁,数量为2个;
12.绞龙,与料仓固定,用于将饵料提升并通过上端的开孔下落到投饵盘中;
13.投饵盘,设置在船体前方,与绞龙的上端开口正对,用于将饵料成扇形投撒到水面;
14.摄像头,设置在甲板的前端,用于采集运行前方的视觉信息;
15.避障传感器,设置在船体两侧、甲板前方下沿的位置,用于对船体运行前方障碍物进行探测;
16.水深传感器,设置在船体底部,用于探测船体吃水深度,并推算料仓中的饵料装载量和消耗量;
17.电池,设置在甲板后部的开孔内,用于提供电源;
18.控制板,设置在甲板后部的开孔内,用于接收传感信息并控制驱动轮、明轮、绞龙以及投饵盘的工作。
19.进一步地,所述的驱动轮采用防陷车轮,通过设计驱动轮的直径以及轴心位置使得船体底部离地间隙在10cm以上,前后两个驱动轮的轴间距不大于船体长度的80%,不小于船体长度的20%。
20.进一步地,所述明轮的叶片内边线在驱动轮的轮边外边线的外部,间距1cm以上。
21.进一步地,通过设计明轮直径以及轴心安装高度,使船体满载时水位线不超过明轮直径的三份之一,空载时不超过五分之一。
22.进一步地,所述料仓的外壁设有震动电机,用于在绞龙工作时震动料仓,防止饵料附着在料仓壁上,并帮助饵料从料仓底部下落到绞龙。
23.进一步地,所述的底部船舱上设有水深传感器,所述的水深传感器与控制板电连接;控制板通过水深传感器反馈的船只吃水深度来测算饵料的饵料装载量和消耗量。
24.进一步地,所述甲板的前端部固定有支架,支架横跨投饵盘,所述的摄像头固定在支架上。
25.进一步地,所述的控制板包括有主控芯片、通讯模块、定位模块和驱动模块;
26.通讯模块一方面接收指令,另一方面将船体数据和视觉信息上传;定位模块用于接收gps/北斗信号,确定船体当前位置;驱动模块接收主控芯片指令,控制船体上驱动轮、明轮、绞龙以及投饵盘的动作;主控芯片带有imu传感,用于闭环控制船体的直线运动,同时接收避障传感器的信息来控制驱动轮或者明轮进行障碍规避。
27.与现有技术相比,本发明具有以下有益效果:
28.1、本发明通过设置由控制板控制的驱动轮和明轮,使投饵船可实现水陆两栖跨塘作业,并在作业完成后可以在陆地行驶到指定地点停止。
29.2、本发明将驱动轮内嵌于船体外壁,将明轮外贴于船体外壁,同时将明轮对称设置在船体两侧、两个驱动轮之间的上部位置,可以避免驱动轮与明轮之间的干涉,同时避免了明轮在水中运行过程中的水草缠绕问题。
30.3、本发明引入了水深传感器,通过测量船只的吃水深度,获取载重信息,解决了饵料的消耗量和剩余量难以获取的问题。
附图说明
31.图1为本发明无人投饵船的整体结构示意图;
32.图2为本发明无人投饵船的侧视图;
33.图3为本发明无人投饵船的俯视图;
34.图4为本发明无人投饵船的正视图;
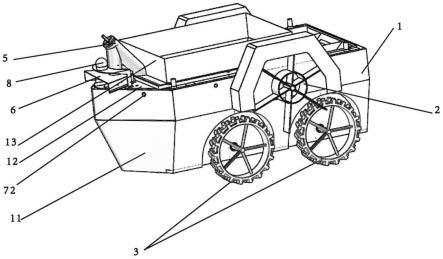
35.图5为本发明无人投饵船的另一角度示意图;
36.图6为本发明中控制板对应位置的局部放大图;
37.图7为本发明无人投饵船的部分分解示意图。
38.图中:1-船体;2-明轮;3-驱动轮;4-震动电机;5-绞龙;6-投饵盘;71-水深传感器;72-避障传感器;8-摄像头;9-电池;10-控制板;11-船舱;12-甲板;13-料仓;101-主控芯片;102-通讯模块;103-定位模块;104-驱动模块。
具体实施方式
39.下面结合附图和实施例对本发明做进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
40.在本技术实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可更换连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术实施例中的具体含义。
41.如图1~7所示,一种水陆两栖可跨塘作业的无人投饵船,包括船体1、明轮2、驱动轮3、震动电机4、绞龙5、投饵盘6、水深传感器71,避障传感器72、摄像头8、电池9、控制板10。
42.其中,船体1由底部船舱11、甲板12和料仓13三部分组成。底部船舱11的上方焊接有甲板12,保证船只从岸上入水时头部侵入水中舱内不会进水。甲板12的中间开孔用于放置料仓13,后部开孔用于放置电池9和控制板10。料仓13与的外围设有翻边结构,料仓13通过翻边结构扣放在甲板上,之间装有密封条,用于防水。
43.驱动轮3设有四个,对称分布在船体两侧,并内嵌于船体外壁。明轮2设有两个,对称分布在船体两侧、驱动轮之间的上部,明轮2外贴于船体外壁;明轮2的外侧设有防止水花的挡板。
44.驱动轮3和明轮2分别由底部船舱内设置的电机驱动,电机转动由控制板10内的驱动模块104控制。
45.料仓13与绞龙5为一体焊接的底部密封的倒锥体结构,上方敞开用于放料,绞龙5将饵料提升并通过上方的开孔下落到投饵盘6中。投饵盘6位于船体1前方,绞龙管的下方。
46.料仓13外侧贴有震动电机4,在绞龙5工作时震动料仓13,防止饵料附着在料仓壁上,并帮助饵料从锥体底部下落到绞龙5。
47.水深传感器71固定在船舱上,用于反馈船只吃水深度,并根据深度变化推算饵料的剩余总量和消耗情况。
48.避障传感器72位于船体前方甲板的下沿两侧,对船体运行前方障碍物进行探测。甲板12的前端部固定有支架,支架横跨投饵盘6,摄像头8固定在支架上,用于采集运行前方视觉信息,视觉采集不受绞龙和投饵盘的影响。
49.电池9从甲板12后方开孔倾斜放入船舱,通过箱体结构固定,电池9用于给各个部件提供电源。
50.本实施例中,驱动轮3采用防陷车轮,其直径与轴心位置使得船体底部离地间隙在10cm以上,其前后轴间距不大于船体长度的80%,不小于船体长度的20%。
51.明轮2的叶片内边线在驱动3轮的轮边外边线外部,间距1cm以上,且轴心安置高度
和明轮直径,满足船只满载时水位线不超过明轮直径的三份之一,空载时不超过五分之一。
52.如图6所示,控制板10包括有主控芯片101、通讯模块102、定位模块103、驱动模块104等。通讯模块102一方面接收指令,一方面将船体数据和视觉采集信息上传;定位模块103用于接收gps/北斗信号,确定船只当前位置;驱动模块104接收主控芯片101指令,控制船体上各个电机和水泵的动作;主控芯片101有imu传感,用于闭环控制船只的直线运动;同时,主控芯片101接收避障传感信息,并控制驱动轮3或者明轮2进行障碍规避。
53.本发明的无人投饵船的作业过程总,控制板10的控制如下:
54.人工将需要投喂的饵料倒入料仓13后,发送控制指令,控制水陆两栖无人投饵船的四个驱动轮3,使其行驶到下水点,并调整朝向,使其前进方向垂直岸边,驶入水中。
55.通过水深传感器71获得的数据,断定水陆两栖无人投饵船驶入水中后,将停止驱动轮3动作,并发送控制指令,控制水陆两栖无人投饵船左右两侧的明轮2,使船只沿着规定的航线行驶。
56.同时启动绞龙5和投饵盘6动作,通过绞龙5将饵料提升输送到投饵盘6中,然后由投饵盘6的快速转动,将饵料成扇形投撒到水面,水陆两栖无人投饵船一边沿着航线行驶一边进行饵料投喂,实现水塘均匀投饵作业。
57.在投饵作业过程中,水深传感器71实时传递船只的吃水深度,并通过深度变化推算饵料的剩余总量和消耗情况。
58.在沿着设定航线完成水中投饵作业后,水陆两栖无人投饵船航行到上水点,调整船头朝向,使船头垂直指向岸边,然后同时开动驱动轮3和明轮2推动船只上岸。在水深传感器71反馈船只已经上岸后,停止明轮2动作,改单独由驱动轮3控制船只在陆上行进,行进至指定地点。
59.如果还有新的水塘投料任务,则重复之前的过程,水陆两栖无人投饵船将从指定地点行驶到下水点,进行跨塘投料做作业。在陆上行进过程中,避障传感器72检测到障碍物后,水陆两栖无人投饵船将绕行。如果所有的塘子的投料任务完成,水陆两栖无人投饵船将停在指定地点,并通过通讯模块发送作业完毕的信息。
60.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1