一种激光驱鸟方法及系统与流程
1.本发明涉及电力系统鸟害预防与治理设备,具体是一种激光驱鸟方法及系统。
背景技术:
2.随着生态环境的逐步改善,输电线路周边的林鸟、涉禽、猛禽在内的野生鸟类也逐渐丰富多样性,但也导致鸟害对输电线路安全运行的威胁程度日益加剧,已经成为输电线路故障主要原因之一。
3.目前主要依靠相关工作人员的运行经验来开展电网防鸟害工作,具体为在输电线路周边的安装防鸟害措施,比如防鸟刺,但是防鸟刺长时间运行后会出现锈蚀变形的情况,鸟类会依托防鸟刺筑巢。此外,鸟类具有定点、定期和群居的生活习性,常年在同一地点繁殖,活动范围比较固定。在拆除某杆塔上的鸟巢之后,鸟类很快又在原位筑巢,特别是正处于繁殖期间的鸟类,反复筑巢的规律更加明显。针对上述情况,相关工作人员又通过投放驱鸟器来开展电网防鸟害工作,电力行业当前应用的驱鸟器,多为传统声音驱鸟器,靠发出大型动物的吼叫声,实现对电力设备周围鸟类的驱赶。鸟类会很快适应该种设备发出的声音,从而失去驱鸟的作用。
4.而现有的激光发射器,存在照射范围小、激光功率低、驱鸟效率低等诸多问题。因此未能在电力行业大范围推广应用,目前尚未出现符合电力行业需求的专用激光驱鸟器。
技术实现要素:
5.本发明为了解决因鸟害引起的输电线路故障问题,特此提供一种激光驱鸟方法,方法包括:
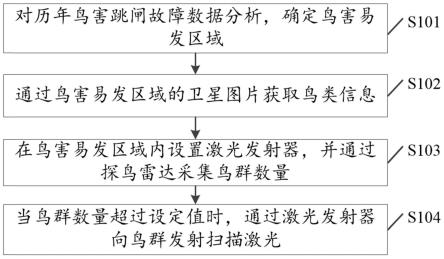
6.s101、对历年鸟害跳闸故障数据分析,确定鸟害易发区域;
7.s102、通过鸟害易发区域的卫星图片获取鸟类信息;
8.s103、在鸟害易发区域内设置激光发射器,并通过探鸟雷达采集鸟群数量;
9.s104、当鸟群数量超过设定值时,通过激光发射器向鸟群发射扫描激光。
10.优选地,步骤s101包括:
11.绘制鸟害易发区域的绿地图,并标注出河流、湖泊、水库、湿地、森林、农田、城镇、村庄的位置信息,并根据位置信息,绘制候鸟迁徙通道图;
12.基于鸟害易发区域内的地理接线图,绘制涉鸟故障分布图;
13.优选地,步骤s102包括:
14.基于鸟类信息确定涉鸟故障信息;
15.涉鸟故障信息包括鸟粪类、鸟体短接类、鸟巢类和鸟啄类。
16.优选地,步骤s102包括:
17.依据候鸟迁徙通道图、涉鸟故障分布图、绿地图确定涉鸟故障风险位置点;
18.在涉鸟故障风险位置点处安装激光发射器。
19.优选地,步骤s104包括:
20.对激光束的快轴进行准直;
21.根据地形、季节设定二维运动轨迹图案控制激光束进行阶梯式扫描。
22.本发明还提供一种激光驱鸟系统,包括:激光发射器;
23.激光发射器一侧开设有激光发射窗;
24.激光发射器内设有激光发射模组、控制单元;
25.激光发射模组一侧设有扫描振镜,扫描振镜、激光发射模组均与控制单元连接;
26.激光发射器底部连接有转动机构,转动机构内设有伺服电机;
27.控制单元与伺服电机连接,转动机构底部连接有云台。
28.优选地,还包括通信模块和探鸟雷达;
29.控制单元通过通信模块与探鸟雷达连接,通过探鸟雷达获取鸟群位置信息;
30.基于鸟群位置信息,控制单元通过转动机构、云台调整激光发射窗的角度。
31.优选地,激光发射窗包括激光扩束准直镜和非球面聚焦镜;
32.激光扩束准直镜,用于对激光束的快轴进行准直;
33.非球面聚焦镜,用于对激光光束进行聚焦、均匀化整形。
34.优选地,控制单元通过扫描振镜设定二维运动轨迹图案控制激光束进行阶梯式扫描。
35.优选地,激光发射器内设有交直流变换器和散热风扇;
36.激光发射器一侧设有散热风道;
37.交直流变换器与控制单元连接,用于将交流电转化为直流电。
38.从以上技术方案可以看出,本发明具有以下优点:
39.本技术通过摸清鸟类活动规律,确定鸟类分布范围,基于鸟类习性、种群数量,在输电线路上安装激光发射器,进行针对性布控,解决当前防护不足,防鸟害工作不及时、不到位,驱鸟效率低等诸多问题。本发明通过探鸟雷达获取鸟群数量,及时向鸟群发射激光进行驱散,防止鸟群在输电线路上驻留。本发明通过扫描振镜编辑扫描图形,能够根据被扫描设备的外形定值最佳驱鸟图形。本发明通过转动机构和云台,实现激光发射器360
°
无死角扫描驱鸟,提高驱鸟范围。本发明通过激光扩束准直镜和非球面聚焦镜组合,能够减小了激光束发散角度,出光能量更加集中,使有效驱鸟射程更远。
附图说明
40.为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
41.图1为激光驱鸟方法流程图。
42.图2为激光发射器立体图。
43.图3为激光发射器侧视图。
44.图4为激光发射器内部结构示意图。
45.图5为激光驱鸟系统示意图。
46.图中:1-激光发射器、2-激光发射窗、3-转动机构、4-云台、5-散热风道、10-扫描振镜、11-激光发射模组、12-散热风扇、13-交直流变换器、14-控制单元、15-通信模块、16-探
鸟雷达。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.除非另有定义,本技术实施例所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本技术实施例中所使用的术语只是为了描述本技术实施例的目的,不是旨在限制本技术。
49.本发明提供的激光驱鸟系统中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
50.本发明提供的激光驱鸟系统的附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
51.在本发明提供的激光驱鸟系统中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口、装置或单元的间接耦合或通信连接,也可以是电的,机械的或其它的形式连接。
52.所属技术领域的技术人员能够理解,本发明提供的激光驱鸟系统的各个方面可以实现为系统、方法或程序产品。因此,本公开的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。
53.对本技术实施例进行进一步详细说明之前,对本技术实施例中涉及的名词和术语进行说明,本技术实施例中涉及的名词和术语适用于如下的解释。
54.云台4是两个交流电机或直流电机组成的安装平台,可以水平和垂直的运动。根据其回转的特点可分为只能左右旋转的水平旋转云台和既能左右旋转又能上下旋转的全方位云台。
55.振镜扫描是将激光发射装置产生的激光束先入射到x轴振镜上,经反射后再入射到y轴振镜上,经过y轴振镜的二次反射即可投射到工作平面,形成扫描点。然后通过振镜电机带动x、y两个扫描头组成的光束偏转器的偏转,来实现激光束在预定扫描范围内的移动,即完成图像的扫描。
56.非球面聚焦镜:用于光纤激光光学系统中的聚焦镜,基材为融石英材料,双面镀增透膜,应用在激光准直、聚焦、激光器与光纤耦合方面,对激光光束进行准直、聚焦、均匀化等整形。
57.激光扩束准直镜的倍率即光束直径的放大倍率。从激光器输出的激光束的光斑尺寸和发散角乘积是光学不变量,近似为一定值。当束腰半径扩大x倍时,其发散角相应压缩为原来的1/x,压缩发散角实际就是激光的准直。
58.准直就是让发散的光变成准直的光,通常光线是发散的,即开始相邻的两条光线传播后会相离越来越远。准直准直通俗说就是保持光线之间是平行的。
59.称波片中传播速度慢的光矢量(light vector)方向为慢轴。称波片中传播速度快的光矢量方向为快轴。
60.在本技术实施例的实施过程中,申请人发现相关技术存在以下问题:
61.传统激光驱鸟器采用的是功率为500mw的532nm绿色激光驱鸟束,利用单片透镜进行光束准直,导致发散角大于10mrad。小的输出光功率和大的发散角,严重限制其有效射程最大仅有100m,且照射范围内光斑尺寸大小各异,也不支持在黎明、黄昏和夜间等低光条件下的驱鸟工作。传统驱鸟器仅具有二维旋转云台,水平轴360
°
连续旋转,俯仰轴仅
±
90
°
可调整,导致了很大的扫描盲区。且其扫描形状及方式单一、无灵活性,鸟类具有学习能力而产生视觉适应性,大大降低了驱鸟效果。
62.基于此,本发明提供一种激光驱鸟系统,系统包括:激光发射器1。激光发射器1一侧开设有激光发射窗2,激光发射窗2包括激光扩束准直镜和非球面聚焦镜。其中激光扩束准直镜用于对激光束的快轴进行准直,非球面聚焦镜用于对激光光束进行聚焦、均匀化整形。激光发射器1内设有激光发射模组11,激光发射模组11采用最新的2瓦纯绿色半导体激光器,发射功率为2w的绿色激光束,具有环境适应性强、出光稳定、寿命长等优势。本发明采用紧凑、高性能的微米级快轴准直镜与非球面镜组合对功率为2w的绿色激光束的快轴进行高效准直,将发散角调整至0.3mrad,有效射程可达3km。从而在扩大照射范围、增加驱鸟强度的同时减小了光污染、弥补了低光条件下全天候驱鸟工作可行性。
63.激光发射器1内设有交直流变换器13和散热风扇12,激光发射器1一侧设有散热风道5,通过与散热风扇12配合,对激光发射器1内高功率电子器件进行散热。交直流变换器13与控制单元14连接,用于将输电线路上的交流电转化为直流电,满足本技术大功率的需求,并实现对系统进行供电。
64.激光发射器1内设有控制单元14,控制单元14包括电控板、继电控制电路和stm32系列的单片机。激光发射模组11一侧设有扫描振镜10,扫描振镜10、激光发射模组11均与控制单元14连接,激光发射器1底部连接有转动机构3,转动机构3内设有伺服电机,控制单元14与伺服电机连接,转动机构3底部连接有云台4,云台4具备水平360
°
连续旋转能力。
65.控制单元14通过伺服电机控制转动机构3进行相应转动,并由转动机构3带动激光发射器1相应转动,使得本发明的激光发射器1具备水平360
°
连续旋转、俯仰
±
120
°
扫描区域,并在此基础上,本发明搭配了一对二维扫描振镜10,其工作频率可从10hz~30khz可调,可根据地形、季节控制激光束进行无盲区的高频扫描、设定不同的二维运动轨迹图案实现了多样性、高频率、阶梯式扫描方式,不仅实现了无死角全方位驱鸟,且灵活解决了鸟类产生适应性的问题。
66.本发明还包括通信模块15和探鸟雷达16,控制单元14通过通信模块15与探鸟雷达16连接,通信模块15采用4g通信模组。本发明通过探鸟雷达16获取鸟群位置信息,基于鸟群位置信息,控制单元14通过转动机构3、云台4调整激光发射窗2的角度。
67.针对上述激光驱鸟系统,本发明通过一种激光驱鸟方法,对激光驱鸟系统的驱鸟过程进一步说明,方法包括:
68.s101、对历年鸟害跳闸故障数据分析,确定鸟害易发区域,绘制鸟害易发区域的绿地图,并标注出河流、湖泊、水库、湿地、森林、农田、城镇、村庄的位置信息,并根据位置信息,绘制候鸟迁徙通道图,候鸟栖息地主要位于湿地、水库、河流及沿海区域,以水鸟为主,种类多达107种,其中候鸟103种,占总数的96.2%。当该区域内属于人员相对稀少,食物水源充足区域,则可以判定该区域内鸟类活动密集,为鸟害易发区域。基于鸟害易发区域内的地理接线图,历年鸟害跳闸故障数据,绘制涉鸟故障分布图。
69.s102、通过鸟害易发区域的卫星图片获取鸟类信息;基于鸟类信息确定涉鸟故障信息,针对不同鸟类体型大小,筑巢习性,捕食方式等,确定该地区的鸟类是否具备对输电线路损坏能力。涉鸟故障信息包括鸟粪类、鸟体短接类、鸟巢类和鸟啄类。比如鸟粪类故障主要由鹰、鹳、鹭等大型鸟类排粪引起,常见的有东方白鹳、白鹭、苍鹭、大雁等。
70.s103、在鸟害易发区域内设置激光发射器1,并通过探鸟雷达16采集鸟群数量;具体为依据候鸟迁徙通道图、涉鸟故障分布图、绿地图确定涉鸟故障风险位置点,基于此处常见鸟类信息对涉鸟故障风险位置点进行危险等级评估。本发明建立涉鸟故障与季节性、时间性、地域之间的联系,比如杆塔周边地形环境是否以河流、湖泊、水库、湿地、农田为主,若是,则为候鸟提供了良好的栖息地,该地区的属于涉鸟故障高风险区,则再此处的涉鸟故障风险位置点处安装激光发射器1,同时需选择安装防鸟挡板、防鸟罩、人工鸟巢等其他防鸟装置,还可结合实际情况加装超声波驱鸟器等智能电子驱鸟装置。
71.s104、当鸟群数量超过设定值时,通过激光发射器1向鸟群发射扫描激光。
72.对激光束的快轴进行准直,根据地形、季节设定二维运动轨迹图案控制激光束进行阶梯式扫描。需要解释的是,季节影响周边树木枝叶生长,本技术通过扫描振镜10使扫描图形可编辑,可根据被扫描设备的外形定值最佳驱鸟图形。
73.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1