一种高空修剪机械手的制作方法
1.本发明涉及园林苗木修剪装置技术领域,特别是涉及一种高空修剪机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.园林,指特定培养的自然环境和游憩境域,在一定的地域运用工程技术和艺术手段,通过改造地形(或进一步筑山、叠石、理水)、种植树木花草、营造建筑和布置园路等途径创作而成的美的自然环境和游憩境域,就称为园林,在园林的改造中需要移植苗木,同时定期的对园林中的苗木进行修剪。
4.然而,在园林的修剪过程中需要定期的对过多和损坏的苗木枝丫进行修剪,苗木修剪过程中大部分使用修剪刀或者修剪锯子,此修剪方法由于主要依靠人工修剪常使得修剪的位置容易偏移,影响苗木枝丫的修剪质量及其效率,且碎屑和修剪后的枯枝容易从高处掉落,清理不方便且容易砸伤工人。
技术实现要素:
5.基于此,有必要针对目前的修剪设备所存在的问题,提供一种高空修剪机械手。
6.上述目的通过下述技术方案实现:一种高空修剪机械手,包括:机座;剪切机构,所述剪切机构包括第一刀片组和第二刀片组,所述第一刀片组和所述第二刀片组相错设置,所述第一刀片组包括多个第一刀片,所述第二刀片组包括多个第二刀片,多个所述第一刀片和多个所述第二刀片均用以剪切树植;所述剪切机构还包括剪切箱、第一滑动板、第二滑动板、第一收束杆、第二收束杆、第三收束杆、第四收束杆、第五收束杆和第六收束杆,所述第一滑动板和所述第二滑动板均设置在所述剪切箱上且所述第一滑动板和第二滑动板相对设置;所述第一收束杆能够转动地设置在所述第一滑动板上;所述第二收束杆一端能够转动地设置在所述第一收束杆上,另一端能够转动地设置在所述第三收束杆上;相邻收束杆之间形成v字形,多个所述第一刀片设置在所述第一收束杆、所述第二收束杆和所述第三收束杆上;所述第五收束杆一端能够转动地设置在所述第四收束杆上,另一端能够转动地设置在所述第六收束杆上;相邻收束杆之间形成v字形,多个所述第二刀片设置在所述第四收束杆、所述第五收束杆和所述第六收束杆上;粉碎机构,所述粉碎机构设置在所述剪切机构上,所述粉碎机构用以粉碎树植;收集机构,设置在所述机座上,所述收集机构包括收集箱,所述收集箱用以收集树植;
传动机构,设置在所述机座上,所述传动机构用以连接并带动所述收集机构、所述粉碎机构和所述剪切机构移动。
7.在其中一个实施例中,所述剪切机构包括第一驱动件、第二驱动件、第一导向盘、第二导向盘、第一导向齿轮、第二导向齿轮、第一齿条、第二齿条、第三齿条、第四齿条和滑块;所述第一收束杆、所述第二收束杆和所述第三收束杆上均设置有所述第一导向齿轮;所述第四收束杆能够转动地设置在所述第一滑动板上;所述第四收束杆、所述第五收束杆和所述第六收束杆上均设置有所述第二导向齿轮;所述第一导向盘设置在所述第二滑动板上;所述第二导向盘设置在所述第一滑动板上;所述滑块的数量为多个;所述第一齿条一端能够滑动地设置在所述第一滑动板上,另一端与所述滑块能够转动地连接,所述滑块能够滑动地设置在所述第二导向盘上;所述第二齿条一端能够滑动地设置在所述第二滑动板上,另一端与所述滑块能够转动地连接,所述滑块能够滑动地设置在所述第一导向盘上;所述第三齿条一端能够滑动地设置在所述第一滑动板上,另一端与所述滑块能够转动地连接,所述滑块能够滑动地设置在所述第二导向盘上;所述第四齿条一端能够滑动地设置在所述第二滑动板上,另一端与所述滑块能够转动地连接,所述滑块能够滑动地设置在所述第一导向盘上;所述第一导向齿轮包括两部分,第一部分和所述第一齿条啮合,第二部分和所述第二齿条啮合;所述第二导向齿轮包括两部分,第一部分和所述第三齿条啮合,第二部分和所述第四齿条啮合;所述第一驱动件用以提供所述第一导向盘转动的驱动力;所述第二驱动件用以提供所述第二导向盘转动的驱动力。
8.在其中一个实施例中,所述剪切机构还包括螺纹杆;所述第一滑动板和所述第二滑动板均能够滑动地设置在所述剪切箱上且所述第一滑动板和第二滑动板相对设置;所述螺纹杆上设置有两段转向相反的螺纹,所述第一收束杆、所述第二收束杆和所述第三收束杆均能够拆卸地设置在所述螺纹杆上。
9.在其中一个实施例中,所述剪切机构还包括扇叶和扇叶驱动件;所述扇叶能够转动地设置在所述剪切箱内;所述扇叶驱动件提供所述扇叶转动的驱动力。
10.在其中一个实施例中,所述传动机构包括连接架、第一液压杆、第二液压杆、第三液压杆、第一液压缸、第二液压缸和连接杆;所述第一液压杆能够滑动地设置在所述机座上;所述连接架一端能够滑动地设置在所述机座上,另一端能够滑动地设置在所述收集箱上;所述第一液压杆提供所述连接架上升或下降的驱动力;所述第一液压缸设置在所述收集箱上,所述第一液压缸提供所述第二液压杆移动的驱动力;所述第二液压缸能够转动地设置在所述收集箱上,所述第二液压缸提供所述第三液压杆移动的驱动力;所述连接架一端能够转动地设置在所述第二液压杆上,另一端能够转动地设置在所述第二液压缸上。
11.在其中一个实施例中,所述粉碎机构包括粉碎箱、第一粉碎轮、第二粉碎轮和第三驱动件;所述粉碎箱用以收集所述剪切机构剪切下的树植;所述第一粉碎轮和所述第二粉碎轮均设置在所述粉碎箱内,所述第一粉碎轮和所述第二粉碎轮均用以粉碎树植;所述第三驱动件用以提供所述第一粉碎轮和所述第二粉碎轮转动的驱动力。
12.在其中一个实施例中,所述粉碎机构还包括第四驱动件和转动盘,所述转动盘设置在所述粉碎箱上;所述第四驱动件用以提供所述转动盘转动的驱动力。
13.在其中一个实施例中,所述收集箱上设置有抽板,所述抽板能够滑动地设置在所述收集箱上。
14.在其中一个实施例中,所述机械手还包括喷水头,所述喷水头用以向所述收集箱内喷水。
15.本发明的有益效果是:本发明涉及一种高空修剪机械手,包括机座、剪切机构、粉碎机构、收集机构和传动机构,剪切机构包括第一刀片组和第二刀片组,第一刀片组和第二刀片组相错设置,第一刀片组包括多个第一刀片,第二刀片组包括多个第二刀片,多个第一刀片和多个第二刀组均用以剪切树植;粉碎机构设置在剪切机构上,粉碎机构用以粉碎树植,收集机构设置在机座上,收集机构包括收集箱,收集箱用以收集树植;传动机构设置在机座上,传动机构用以连接并带动收集机构、粉碎机构和剪切机构移动。通过设置剪切机构、粉碎机构和收集机构,使得修剪的位置不会偏移,在保证树植的修剪质量的同时,能够将剪切下来的树植收集起来。
附图说明
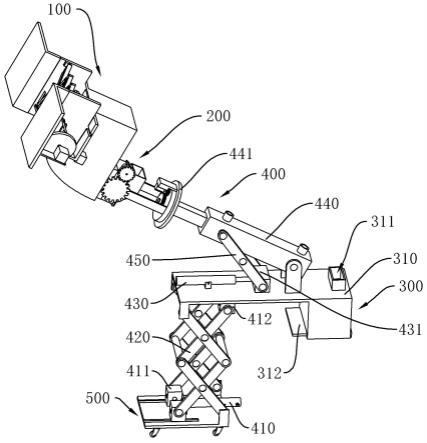
16.图1为本发明一实施例提供的高空修剪机械手的立体结构示意图;图2为本发明一实施例提供的高空修剪机械手的剪切机构的立体结构示意图一;图3为本发明一实施例提供的高空修剪机械手的剪切机构的正视结构示意图;图4为本发明一实施例提供的高空修剪机械手的剪切机构的立体结构示意图二;图5为本发明一实施例提供的高空修剪机械手的剪切机构的后视结构示意图;图6为图5所示的高空修剪机械手的剪切机构的a-a向剖面视图;图7为本发明一实施例提供的高空修剪机械手的粉碎机构的立体结构示意图;图8为图7所示的高空修剪机械手的粉碎机构的剖视结构示意图。
17.其中:100、剪切机构;110、剪切箱;111、导向槽;112、剪切箱出口;120、扇叶电机;121、扇叶;130、第一滑动板;131、第一连接板;140、第二滑动板;141、第二连接板;150、第一电机;151、第一导向盘;160、第一剪切组件;161、第一收束杆;162、第二收束杆;163、第一刀片;1631、第一导向齿轮;164、第三收束杆;165、第一齿条;166、第二齿条;167、螺纹杆;170、第二剪切组件;171、第四收束杆;172、第五收束杆;173、第二刀片;1731、第二导向齿轮;174、第六收束杆;175、第三齿条;176、第四齿条;180、第二电机;181、第二导向盘;200、粉碎机构;210、粉碎箱;211、粉碎箱出口;220、第一粉碎轮;230、第二粉碎轮;240、第三电机;241、第一齿轮;242、第二齿轮;250、第四电机;251、第三齿轮;252、第四齿轮;253、转动盘;300、收集机构;310、收集箱;311、收集箱入口;312、抽板;400、传动机构;410、第一液压杆;411、第一滑块;412、第二滑块;420、连接架;430、第一液压缸;431、第二液压杆;440、第二液压缸;441、第三液压杆;450、连接杆;500、机座。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下通过实施例,并结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发
明,并不用于限定本发明。
19.本文中为组件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
21.如图1至图8所示,本发明一实施例提供的高空修剪机械手,用以修剪树植;在本实施例中,高空修剪机械手包括机座500、剪切机构100、粉碎机构200、收集机构300和传动机构400;剪切机构100包括第一刀片组和第二刀片组,第一刀片组和第二刀片组相错设置,第一刀片组包括多个第一刀片163,第二刀片组包括多个第二刀片173,多个第一刀片163和多个第二刀片173均用以剪切树植;剪切机构100包括剪切箱110、第一滑动板130、第一连接板131、第二滑动板140、第二连接板141、第一收束杆161、第二收束杆162、第三收束杆164、第四收束杆171、第五收束杆172和第六收束杆174,剪切箱110上设置有剪切箱出口112;第一滑动板130和第二滑动板140均设置在剪切箱110上且第一滑动板130和第二滑动板140相对设置,第一连接板131插接在第一滑动板130上,第一连接板131和第一滑动板130同步移动;第二连接板141插接在第二滑动板140上,第二连接板141和第二滑动板140同步移动。
22.第一收束杆161铰接在第一滑动板130上,第三收束杆164铰接在第二滑动板140上;第二收束杆162的数量为四根,第一根第二收束杆162一端与第一收束杆161铰接,另一端与第二根第二收束杆162铰接,第二根第二收束杆162一端与第三根第二收束杆162铰接,第三根第二收束杆162一端与第四根第二收束杆162铰接,第四根第二收束杆162一端与第三收束杆164铰接,相邻收束杆之间形成v字形。
23.第四收束杆171一端铰接在第一滑动板130上,第六收束杆174一端铰接在第二滑动板140上;第五收束杆172的数量为四根,第一根第五收束杆172一端与第四收束杆171铰接,另一端与第二根第五收束杆172铰接,第二根第五收束杆172一端与第三根第五收束杆172铰接,第三根第五收束杆172一端与第四根第五收束杆172铰接,第四根第五收束杆172一端与第六收束杆174铰接,相邻收束杆之间形成v字形。
24.粉碎机构200设置在剪切机构100上,粉碎机构200用以粉碎树植;收集机构300设置在机座500上,收集机构300包括收集箱310,收集箱310设置有收集箱入口311,收集箱310用以收集树植;传动机构400设置在机座500上,传动机构400用以连接并带动收集机构300、粉碎机构200和剪切机构100移动。
25.通过设置剪切机构100、粉碎机构200和收集机构300,使得修剪的位置不会偏移,在保证树植的修剪质量的同时,能够将剪切下来的树植收集起来。
26.在一些实施例中,剪切机构100包括第一驱动件、第二驱动件、第一导向盘151、第二导向盘181、第一剪切组件160和第二剪切组件170;第一剪切组件160包括第一导向齿轮1631、第一齿条165和第二齿条166,第二剪切组件170包括第二刀片173、第二导向齿轮1731、第三齿条175和第四齿条176;第一驱动件用以提供第一导向盘151转动的驱动力,第二驱动件用以提供第二导向盘181转动的驱动力;在本实施例中,第一驱动件为第一电机150,第二驱动件为第二电机180;第一电机150通过螺栓固定连接在第二连接板141上,第一导向盘151固定连接在第一电机150的电机轴上且第一导向盘151的轴线和第一电机150的电机轴的轴线呈预设夹角;第二电机180通过螺栓固定连接在第一连接板131上,第二导向盘181固定连接在第二电机180的电机轴上且第二导向盘181的轴线和第二电机180的电机轴的轴线呈预设夹角。
27.第一齿条165能够左右滑动地设置在第一滑动板130上,第二齿条166能够左右滑动地设置在第二滑动板140上,且第一齿条165和第二齿条166相邻且错开;第一齿条165的一端与滑块铰接,滑块能够沿第二导向盘181的周向方向滑动地套接在第二导向盘181上;第二齿条166的一端与滑块铰接,滑块能够沿第一导向盘151的周向方向滑动地套接在第一导向盘151上;第三齿条175能够左右滑动地设置在第一滑动板130上,第四齿条176能够左右滑动地设置在第二滑动板140上,且第三齿条175和第四齿条176相邻且错开;第三齿条175的一端与滑块铰接,滑块能够沿第二导向盘181的周向方向滑动地套接在第二导向盘181上,第四齿条176的一端与滑块铰接,滑块能够沿第一导向盘151的周向方向滑动地套接在第一导向盘151上。
28.第一刀片163的端部均固定设置有第一导向齿轮1631,第一刀片163的数量为六组,第一组第一刀片163上设置有第一导向齿轮1631的一端与第一收束杆161铰接且铰接点与第一根第二收束杆162一端与第一收束杆161的铰接点重合,第二组第一刀片163上设置有第一导向齿轮1631的一端与第一收束杆161铰接且铰接点与第一根第二收束杆162一端与第一收束杆161的铰接点重合,从前到后,依次为第一组第一刀片163、第二组第一刀片163、第一根第二收束杆162、第一收束杆161;第三组第一刀片163上设置有第一导向齿轮1631的一端与第二根第二收束杆162铰接且铰接点与第二根第二收束杆162一端与第三根第二收束杆162的铰接点重合,第四组第一刀片163上设置有第一导向齿轮1631的一端与第二根第二收束杆162铰接且铰接点与第二根第二收束杆162一端与第三根第二收束杆162的铰接点重合,从前到后,依次为第三组第一刀片163、第四组第一刀片163、第三根第二收束杆162、第二根第二收束杆162;第五组第一刀片163上设置有第一导向齿轮1631的一端与第四根第二收束杆162铰接且铰接点与第四根第二收束杆162与第三收束杆164的铰接点重合,第六组第一刀片163上设置有第一导向齿轮1631的一端与第四根第二收束杆162铰接且铰接点与第四根第二收束杆162与第三收束杆164的铰接点重合,从前到后,依次为第五组第一刀片163、第六组第一刀片163、第三收束杆164、第四组第二收束杆162。
29.第一组第一刀片163、第三组第一刀片163和第五组第一刀片163上的第一导向齿轮1631均同时与第一齿条165啮合,第二组第一刀片163、第四组第一刀片163和第六组第一刀片163上的第一导向齿轮1631均同时与第二齿条166啮合。
30.第二刀片173的端部均固定设置有第二导向齿轮1731,第二刀片173的数量为六组,第二刀片173的排布方式和第一刀片163的排列方式相同。
31.第二组第二刀片173、第四组第二刀片173和第六组第二刀片173上的第二导向齿轮1731均同时与第三齿条175啮合;第一组第二刀片173、第三组第二刀片173和第五组第二刀片173上的第二导向齿轮1731均同时与第三齿条175啮合。
32.第一电机150通过带动第一导向盘151转动,进而带动第二齿条166和第四齿条176左右移动,第二齿条166和第四齿条176带动第一导向齿轮1631转动,第一导向齿轮1631带动相邻的第一刀片163闭合或张开,进而剪切树枝和树叶;第二电机180通过带动第二导向盘181转动,进而带动第一齿条165和第三齿条175左右移动,第一齿条165和第三齿条175带动第二导向齿轮1731转动,第二导向齿轮1731带动相邻的第二刀片173闭合或张开,进而剪切树枝和树叶。
33.在一些实施例中,剪切机构100还包括螺纹杆167,剪切箱110上设置有导向槽111,第一滑动板130能够左右滑动地设置在剪切箱110的一端,第一滑动板130上设置有与导向槽111配合的凸起,第二滑动板140能够左右滑动地设置在剪切箱110的另一端,第二滑动板140上设置有与导向槽111配合的凸起;螺纹杆167一端能够转动地设置在第一滑动板130上,另一端能够转动地设置在第二滑动板140上,螺纹杆167上设置两段有转向相反的螺纹;第二根第二收束杆162和第三根第二收束杆162的下铰接处能够转动地套接在螺纹杆167上;第一收束杆161和第二根第二收束杆162的铰接处能够转动地套接在螺纹杆167上,且与螺纹杆167为螺纹连接;第四根第二收束杆162和第三收束杆164的铰接处能够转动地套接在螺纹杆167上,且与螺纹杆167为螺纹连接;当螺纹杆167转动时,使得相邻收束杆之间的v字形角度变大或变小。
34.可以理解的是,可以采用人工方式转动螺纹杆167,也可以采用电机驱动螺纹杆167转动。
35.在一些实施例中,剪切机构100还包括扇叶121和扇叶驱动件,扇叶驱动件提供扇叶121转动的驱动力;在本实施例中,扇叶驱动件为扇叶电机120,扇叶电机120通过螺栓固定连接在剪切箱110的侧壁上,扇叶121能够转动地设置在剪切箱110的内部,扇叶电机120提供扇叶121转动的驱动力,扇叶121转动进而带动剪切下来的树叶、树枝等落入到剪切箱110中。
36.在一些实施例中,传动机构400包括连接架420、第一液压杆410、第一滑块411、第二滑块412、第二液压杆431、第三液压杆441、第一液压缸430、第二液压缸440和连接杆450;连接架420一端铰接在第一滑块411上,另一端铰接在第二滑块412上;第一滑块411在第一液压杆410的带动下能够左右滑动地连接在机座500上,第二滑块412能够左右滑动地连接在收集箱310上;第一液压缸430固定连接在收集箱310上,第二液压杆431能够左右滑动地套接在第一液压缸430上;第二液压缸440一端铰接在收集箱310上,第三液压杆441能够左右滑动地套接在第二液压缸440上;连接杆450一端铰接在第二液压杆431上,另一端铰接在第二液压缸440上。
37.粉碎机构200包括粉碎箱210、第一粉碎轮220、第二粉碎轮230、第一齿轮241、第二齿轮242和第三驱动件,第三驱动件用以提供第一粉碎轮220和第二粉碎轮230转动的驱动力;在本实施例中,第三驱动件为第三电机240,粉碎箱210一端通过螺栓固定连接在剪切箱110的剪切箱出口112处粉碎箱210上设置有粉碎箱出口211,收集箱入口311和粉碎箱出口211连通;第一粉碎轮220和第二粉碎轮230均能够转动地设置在粉碎箱210内且第一粉碎轮
220和第二粉碎轮230上下错开,轴线在同一个竖直面上;第三电机240通过螺栓固定连接在粉碎箱210的上方,第一齿轮241固定套接在第三电机240的电机轴上,第二齿轮242能够转动地设置在粉碎箱210的侧壁上,第一齿轮241和第二齿轮242啮合,第二齿轮242和第二粉碎轮230同步转动;第三电机240带动第一齿轮241转动,第一齿轮241带动第二齿轮242转动,第二齿轮242带动第二粉碎轮230转动,第二粉碎轮230带动第一粉碎轮220转动,进而将从剪切箱出口112来的成片的树枝树叶粉碎,从粉碎箱出口211排出。
38.粉碎机构200还包括第四驱动件、第三齿轮251、第四齿轮252和转动盘253,第四驱动件提供转动盘253转动的驱动力;在本实施例中,第四驱动件为第四电机250,转动盘253能够转动地连接在第三液压杆441上,第四齿轮252设置在转动盘253上且第四齿轮252与转动盘253同心,第四电机250通过螺栓固定连接在第三液压杆441上,第三齿轮251固定套接在第四电机250的电机轴上,第三齿轮251和第四齿轮252啮合;第四电机250带动第三齿轮251转动,第三齿轮251带动第四齿轮252转动,第四齿轮252带动转动盘253转动,转动盘253带动剪切机构100沿着第四齿轮252的轴线转动,进而适配复杂的剪切角度需求。
39.在一些实施例中,收集箱310上设置有抽板312,抽板312能够滑动地设置在收集箱310上,在需要挪移收集箱310内的树植或收集箱310装满时,可通过抽板312将收集箱310中的树植放出,进行统一处理。
40.在一些实施例中,高空修剪机械手还包括喷水头,喷水头用以向收集箱310内喷水,进而便于收集收集箱310内的树植。
41.结合上述实施例,本发明实施例的使用原理和工作过程如下:根据使用环境和使用需求的不同,高空修剪机械手可以安装在不同的运输设备上;如在进行园林修剪时,不便于采用汽车运输,则可将高空修剪机械手安装在推车上;如在进行道路树植修剪时,则可将高空修剪机械手安装在汽车上,实现边运输边修剪树植,提供工作效率。
42.修剪时,将高空修剪机械手运输到指定位置,通过液压缸调节第一液压杆410在机座500上的位置,第一液压杆410带动第一滑块411移动,第一滑块411带动连接架420上升或下降,使得收集箱310处于合适的高度。
43.通过第一液压缸430带动第二液压杆431移动,第二液压杆431通过连接杆450带动第二液压缸440上升或下降,使得剪切机构100处于合适的高度;通过第二液压缸440带动第三液压杆441伸出或缩回,使得剪切机构100处于合适的位置;通过第四电机250带动第三齿轮251转动,第三齿轮251带动第四齿轮252转动,第四齿轮252带动转动盘253转动,转动盘253带动剪切机构100处于合适的角度;通过电机带动螺纹杆167转动,使得第一滑动板130和第二滑动板140之间具有合适的距离。
44.同时启动扇叶电机120、第一电机150、第二电机180和第三电机240,第一电机150带动第一导向盘151转动,进而带动第二齿条166和第四齿条176左右移动,第二齿条166和第四齿条176带动第一导向齿轮1631转动,第一导向齿轮1631带动相邻的第一刀片163闭合或张开,进而剪切树枝和树叶;第二电机180带动第二导向盘181转动,进而带动第一齿条165和第三齿条175左右移动,第一齿条165和第三齿条175带动第二导向齿轮1731转动,第二导向齿轮1731带动相邻的第二刀片173闭合或张开,进而剪切树枝和树叶;在第一刀片163和第二刀片173剪切树植的同时,扇叶电机120带动扇叶121转动,扇叶121将第一刀片
163和第二刀片173剪切下的树植运送至剪切箱出口112;第三电机240带动第一齿轮241转动,第一齿轮241带动第二齿轮242转动,第二齿轮242带动第二粉碎轮230转动,第二粉碎轮230带动第一粉碎轮220转动,进而将从剪切箱出口112来的树植粉碎,粉碎后的树植从粉碎箱出口211通过软管运送至收集箱入口311,最后集中收集在收集箱310中;在需要挪移收集箱310内的树植或收集箱310装满时,可通过抽板312将收集箱310中的树植放出,进行统一处理。
45.修剪后,通过液压缸调节第一液压杆410在机座500上的位置,使得连接架420下降;通过第一液压缸430带动第二液压杆431收回,通过连接杆450带动第二液压缸440下降;通过第二液压缸440带动第三液压杆441收回,使得剪切机构100收回,从而节省空间。
46.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
47.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1