一种智能化激光驱鸟方法及装置与流程
本发明涉及激光驱鸟,尤其涉及一种智能化激光驱鸟方法及装置。
背景技术:
1、鸟类给现代的生产生活带来很多困扰,例如,飞机撞鸟是造成航空飞行安全的一个国际性难题;野外架空输电线路和杆塔常常成为鸟类停留、栖息的场地,鸟类的筑巢行为、粪便以及较大体型鸟类的活动等会造成线路跳闸事故,为电力行业的正常运行带来巨大的经济损失。现在的驱鸟方法分为听觉如煤气炮、驱鸟车、爆竹弹发射器等、视觉如稻草人、彩色风轮、恐怖眼、激光驱鸟等、嗅觉如驱鸟剂、氨水、农药等、捕杀如猎枪、粘鸟网等、生态如割草、杀虫,以及用于鸟类预警和探测的探鸟雷达系统。
2、目前激光驱鸟法是最为有效的方法,但现有激光驱鸟方法,普遍采用532nm单一波长激光,激光功率恒定,光束直径小且不能自动变换,适用鸟类范围窄,刺激性不强,长时间对鸟儿形成机械记忆,恐吓效果减弱。
3、基于激光驱鸟方式单一、长时间效果不佳的问题,又发展一种基于图像联动的激光驱鸟方式,具有驱鸟效果明显、实用性强、资源和能源消耗少的优点,但此种激光驱鸟系统需要集成了图像采集的光学器件,结构较为复杂能耗过大,所以需要一种新的智能化激光驱鸟方法及装置,能够通过配合传统的监控系统整合已有的技术资源完成激光驱鸟且结构简单节约能源的。
技术实现思路
1、申请的目的是提供一种新的智能化激光驱鸟方法及装置,解决现有技术中现有的激光驱鸟系统需要集成了图像采集的光学器件,结构较为复杂能耗过大的问题。
2、为实现上述目的,本申请实施例采用以下技术方案:
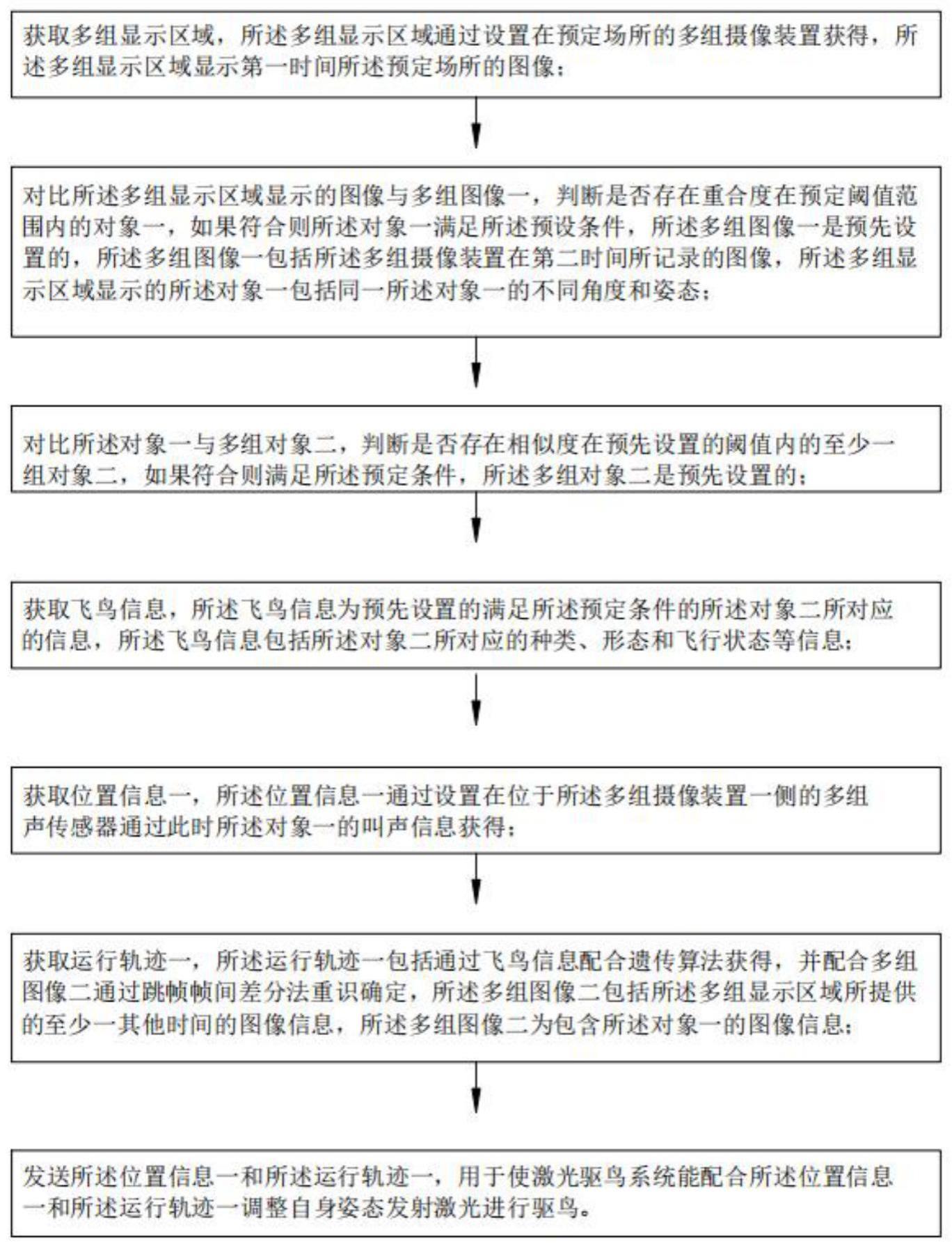
3、获取多组显示区域,多组显示区域通过设置在预定场所的多组摄像装置获得,多组显示区域显示第一时间预定场所的图像;对比多组显示区域显示的图像与多组图像一,判断是否存在重合度在预定阈值范围内的对象一,如果符合则对象一满足预设条件,多组图像一是预先设置的,多组图像一包括多组摄像装置在第二时间所记录的图像,多组显示区域显示的对象一包括同一对象一的不同角度和姿态;对比对象一与多组对象二,判断是否存在相似度在预先设置的阈值内的至少一组对象二,如果符合则满足预定条件,多组对象二是预先设置的;获取飞鸟信息,飞鸟信息为预先设置的满足预定条件的对象二所对应的信息,飞鸟信息包括对象二所对应的种类、形态和飞行状态等信息;获取位置信息一,位置信息一通过设置在位于多组摄像装置一侧的多组声传感器通过此时对象一的叫声信息获得;获取运行轨迹一,运行轨迹一包括通过飞鸟信息配合遗传算法获得,并配合多组图像二通过跳帧帧间差分法重识确定,多组图像二包括多组显示区域所提供的至少一其他时间的图像信息,多组图像二为包含对象一的图像信息;发送位置信息一和运行轨迹一,用于使激光驱鸟系统能配合位置信息一和运行轨迹一调整自身姿态发射激光进行驱鸟。
4、在上述技术方案中,通过包含预定场所的图像、声传感器及可自动旋转的激光驱鸟系统的配合,利用所在地区的飞鸟信息包括种类、形态和飞行状态的已有技术资源完成对进入该预定场所的飞鸟运动轨迹的捕捉,最终能使激光驱鸟系统完成驱鸟,降低了对获取图像一的装置的要求,可通过传统监控系统的摄像装置配合就能完成智能化驱鸟,且结构简单,节省能源。
5、进一步的,在本发明实施例中,摄像装置包括多组摄像头,多组摄像头自动旋转设置,自动旋转的模式为随机模式,摄像头的监控范围存在交叠区域。
6、进一步的,在本发明实施例中,随机模式包括仰拍模式、平拍模式、和俯拍模式。
7、进一步的,在本发明实施例中,声传感器包括光纤声传感器。
8、进一步的,在本发明实施例中,声传感器多组设置,布设在每个摄像头布设点处,形成声探测阵列,每个声传感器通过光缆和解调系统相连。
9、进一步的,在本发明实施例中,飞鸟信息的判断方法包括:判断基本特征一完整度是否在预设的阈值内,如果是,检索数据库中所对应的基本特征二的相似度是否在预设的阈值内,如果是,确定基本特征二所对应的鸟类为抓拍飞鸟所对应的鸟类。
10、本申请实施例还公开了一种智能化驱鸟系统,包括:
11、获取模块一,用于获取多组显示区域,多组显示区域通过设置在预定场所的多组摄像装置获得,多组显示区域,多组显示区域显示此时预定场所的图像;判断模块,用于对比多组显示区域与多组图像一,判断是否存在重合度小于预定阈值的多个对象一,多组图像一是预先设置的,多组图像一包括多组摄像装置在其他对应时间段所记录的图像,多组显示区域存在的多个对象一包括同一对象一不同角度和姿态;对比模块,用于确定多组显示区域存在多个对象一时,基于数据库对比所诉多个对象一并获取所对应的飞鸟信息,数据库包含预定场所的生活在当地各种种类的飞鸟及其形态、飞行状态等信息;获取模块二,用于获取位置信息一,位置信息一通过设置在位于多组摄像装置一侧的多组声传感器通过此时对象一的叫声信息获得;获取模块三,用于获取运行轨迹一,运行轨迹一包括通过飞鸟信息配合遗传算法获得,并配合多组图像二通过跳帧帧间差分法重识确定,多组图像二包括多组显示区域所提供的至少一其他时间的图像信息,多组图像二为包含对象一的图像信息;发送模块,用于发送位置信息一和运行轨迹一,用于使激光驱鸟系统能配合位置信息一和运行轨迹一调整自身姿态发射激光进行驱鸟。
12、本申请实施例还公开了一种处理器,用于完成上述智能化激光驱鸟方法。
13、本申请实施例还公开了一种存储器,用于存储上述智能化激光驱鸟方法的指令和信息。
14、本申请实施例还公开了一种智能化激光驱鸟装置,包括:摄像装置,摄像装置包括多组摄像头,多组摄像头布设在预定场所周围;多组声传感器,多组声传感器布设在每个摄像头的布设点处;激光驱鸟系统,激光驱鸟系统用于通过驱动电机系统进行旋转到位,向飞鸟的位置出射激光进行驱赶;处理器,用于执行权利要求1-9的一种智能化激光驱鸟方法。
15、与现有技术相比,本发明具有以下技术效果:
16、通过采用摄像装置获取包含预定场所的图像信息判断飞鸟来袭,配合已有的技术资源判断飞鸟的习性和种类,这样就可只借助声传感器和遗传算法确定飞鸟位置及运动轨迹配合激光驱鸟系统完成驱鸟,也可配合其他时间的图像信息通过跳帧帧间差分法获得,或者配合至少三组其他摄像头抓拍图像信息确定飞鸟飞行状态获得,进一步保证飞鸟位置及运动轨迹的获取和信息准确性,降低了激光驱鸟中获取飞鸟位置及运动轨迹对图像采集的要求且结构简单,节省能源,解决现有技术中现有的激光驱鸟系统需要集成了图像采集的光学器件,导致结构较为复杂能耗过大的问题。
技术特征:
1.一种智能化激光驱鸟方法,其特征在于,包括:
2.根据权利要求1所述的一种智能化激光驱鸟方法,其特征在于,所述摄像装置包括多组摄像头,所述多组摄像头自动旋转设置,所述自动旋转的模式为随机模式,所述摄像头的监控范围存在交叠区域。
3.根据权利要求2所述的一种智能化激光驱鸟方法,其特征在于,所述随机模式包括仰拍模式、平拍模式、和俯拍模式。
4.根据权利要求1所述的一种智能化激光驱鸟方法,其特征在于,所述声传感器包括光纤声传感器。
5.根据权利要求1所述的一种智能化激光驱鸟方法,其特征在于,所述声传感器多组设置,布设在每个所述摄像头布设点处,形成声探测阵列,每个声传感器通过光缆和解调系统相连。
6.根据权利要求1所述的一种智能化激光驱鸟方法,其特征在于,所述飞鸟信息的判断方法包括:判断基本特征一完整度是否在预设的阈值内,如果是,检索数据库中所对应的基本特征二的相似度是否在预设的阈值内,如果是,确定基本特征二所对应的鸟类为抓拍飞鸟所对应的鸟类。
7.一种智能化驱鸟系统,包括:
8.一种处理器,其特征在于,所述处理器用于执行所述权利要求1-6所述的一种智能化激光驱鸟方法。
9.一种存储器,其特征在于,所述存储器用于存储所述权利要求1-6所述的一种智能化激光驱鸟方法的指令和信息。
10.一种智能化激光驱鸟装置,用于完成权利要求1-9所述的智能化激光驱鸟方法,包括:
技术总结
本申请公开了一种智能化激光驱鸟方法,涉及驱鸟技术领域,用于解决现有技术中现有的激光驱鸟方式由于需要基于集成图像采集的光学器件完成驱鸟导致飞鸟位置信息捕捉要求较高的问题,包括获取多组显示区域;对比多组显示区域与多组图像一;基于数据库判断所诉多个对象一所对应的飞鸟信息;获取位置信息一,通过设置在位于多组摄像装置一侧的多组声传感器通过此时对象一的叫声信息获得;获取运行轨迹一,通过飞鸟信息配合遗传算法获得,并配合多组图像二通过跳帧帧间差分法重识确定;发送位置信息一和运行轨迹一,用于使激光驱鸟系统能配合位置信息一和运行轨迹一调整自身姿态发射激光进行驱鸟,从而实现基于图像联动实时驱鸟。
技术研发人员:周飞,潘晓明,张浩,汪新浩,姬小豪,陆松,李东红
受保护的技术使用者:苏州德睿电力科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!