一种农业技术推广用农作物种植装置的制作方法
1.本实用新型涉及种植设备技术领域,具体涉及一种农业技术推广用农作物种植装置。
背景技术:
2.农业是利用动植物的生长发育规律,通过人工培育来获得产品的产业,农业的劳动对象是有生命的动植物,获得的产品是动植物本身,农业属于第一产业,是提供支撑国民经济建设与发展的基础产业,在农作物种植技术方面比较传统的有手工种植,后来到全自动的机械化式的种植,目前现有的全自动的机械化种植设备一般都是用在较为大规模、大面积的且地势较为平坦的地区,在南方的一些小规模的个人化的种植尤其是一些山区或丘陵等地势不平整的地带所使用的一般都是一些体积较小轻型化种植设备,但是这些设备基本分开的,例如挖土、播种、盖土等都是分开进行的,再一次种植作业时需要分别使用多个单功能工具,效率较低,因此需要一种集中化程度高且功能多的农业技术推广用农作物种植装置。
技术实现要素:
3.本实用新型的目的在于:为解决上述背景中的问题,本实用新型提供了一种农业技术推广用农作物种植装置。
4.本实用新型为了实现上述目的具体采用以下技术方案:
5.一种农业技术推广用农作物种植装置,包括框架,所述框架上设有用于在土壤上开孔的钻孔装置,所述框架上设有用于装载种子颗粒的储物筐,所述储物筐底部连通有用于将种子颗粒投入孔洞内的拨料装置,所述拨料装置的出料口正对所述钻孔装置的钻孔点,所述拨料装置与所述钻孔装置之间设有控料装置,当所述钻孔装置钻孔完成后,通过所述控料装置使位于储物筐内部种子掉落至所述拨料装置内并通过所述拨料装置投入至孔洞内,所述框架底部还设有贴合地面的导板,当种子颗粒投入洞中后,随着框架在地上移动时导板会将地上的土壤往框架前进方向推动,使投完种子颗粒的孔洞会被土壤盖住。
6.进一步地,所述钻孔装置包括通过滑动导轨与支架滑动安装于所述框架上的双轴电机,所述双轴电机输出轴与所述双轴电机的滑动方向均垂直于地面,所述双轴电机靠近地面一端的输出轴上竖直向安装有用于钻孔的绞龙杆。
7.进一步地,所述拨料装置包括自上而下依次贴合顶板、转盘、管道、环形板与导料管,所述顶板和环形板固设于所述框架上,所述转盘通过转轴转动安装在所述顶板上,所述顶板上构造有与所述储物筐内部连通的入料孔,所述管道固设在所述转盘靠近所述环形板的一面,所述环形板固设在所述导料管端部,当所述双轴电机输出转动时,通过所述控料装置带动转轴转动,将位于储物筐内的种子通过管道转移至导料管内。
8.进一步地,滑动导轨顶部与支架之间连接有套设在滑动导轨上的复位弹簧,所述控料装置包括蜗轮、蜗杆、锥齿轮一、锥齿轮二、半圆形齿轮、齿条,所述蜗杆竖直安装于所
述双轴电机顶部的输出轴,所述蜗轮通过支架转动安装于所述双轴电机上,所述蜗轮与所述蜗杆啮合,所述半圆形齿轮安装于所述蜗轮连接轴的一端,所述半圆形齿轮的一端与所述齿条啮合,所述齿条固设于所述框架上,所述蜗杆顶部转动安装有转帽,所述锥齿轮一安装于所述转轴底部,所述锥齿轮二通过杆体转动安装于所述框架上,所述转帽与所述锥齿轮二之间设有摇杆一与摇杆二,所述摇杆一一端水平向转动安装于所述转帽顶部,所述摇杆二一端与所述锥齿轮二一端固定连接,所述摇杆一另一端与所述摇杆二另一端通过铰接杆转动连接。
9.进一步地,所述导板水平方向呈v字型,其开口端朝向所述绞龙杆钻孔点。
10.进一步地,所述框架还包括位于其底部的车轮以及给所述车轮驱动的动力电机。
11.进一步地,所述框架一侧设置有把手。
12.本实用新型的有益效果如下:
13.1、本实用新型通过控料装置来控制钻孔装置与拨料装置实现自动钻孔与投放种子颗粒,另外再由于框架底部的导板使得框架在移动的时候自动推动土壤将孔洞盖住,这样一来,通过本实用新型即可一次完成挖土、播种、盖土三个工作,设备集中化程度高,有利于提高种植工作的效率。
附图说明
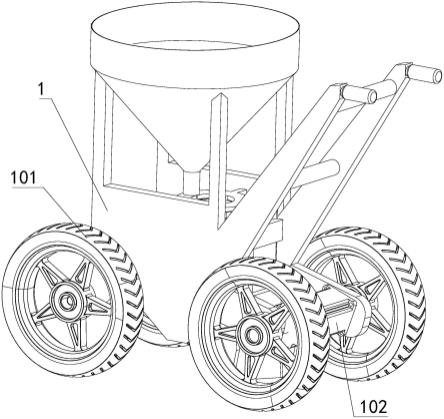
14.图1是本实用新型立体图;
15.图2是本实用新型正视图;
16.图3是本实用新型又一立体图;
17.图4是本实用新型内部结构立体图;
18.图5是本实用新型部分结构立体放大图;
19.图6是本实用新型转帽、摇杆一、摇杆二和锥齿轮二结构正视图;
20.图7是本实用新型拨料装置结构立体图;
21.图8是本实用新型拨料装置结构拆分立体图;
22.附图标记:1、框架;101、车轮;102、动力电机;2、钻孔装置;201、双轴电机;202、绞龙杆;3、储物筐;4、拨料装置;401、导料管;402、转盘;403、顶板;404、管道;405、环形板;406、转轴;5、控料装置;501、蜗轮;502、蜗杆;503、锥齿轮一;504、锥齿轮二;505、半圆形齿轮;506、齿条;507、转帽;508、摇杆一;509、摇杆二;6、导板;7、复位弹簧;8、把手。
具体实施方式
23.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
24.如图1-8所示,一种农业技术推广用农作物种植装置,框架1,框架1上设有用于在土壤上开孔的钻孔装置2,框架1上设有用于装载种子颗粒的储物筐3,储物筐3底部连通有用于将种子颗粒投入孔洞内的拨料装置4,拨料装置4的出料口正对钻孔装置2的钻孔点,拨料装置4与钻孔装置2之间设有控料装置5,当钻孔装置2钻孔完成后,通过控料装置5使位于
储物筐3内部种子掉落至拨料装置4内并通过拨料装置4投入至孔洞内,框架1底部还设有贴合地面的导板6,当种子颗粒投入洞中后,随着框架1在地上移动时导板6会将地上的土壤往框架1前进方向推动,使投完种子颗粒的孔洞会被土壤盖住,需要说明的是:以工作时框架1在地面上移动的方向为正方向,反之为反方向,导板6设在钻孔装置2钻孔点处的反方向,钻孔点位于导板6正方向,当种子颗粒投入洞中后,随着框架1在地上移动时导板6会将地上的土壤往框架1前进方向推动,使投完种子颗粒的孔洞会被土壤盖住,工作时,只需推着框架1在地面上移动,每移动一定距离时启动一次钻孔装置2,实现一次自动钻孔、播种,再随着框架1移动时实现自动盖土,这样一来,通过本实用新型即可一次完成挖土、播种、盖土三个工作,设备集中化程度高,有利于提高种植工作的效率。
25.如图4所示,在一些实施例中,钻孔装置2包括通过支架与滑动导轨滑动安装于框架1内侧的双轴电机201,双轴电机201的输出轴与双轴电机201滑动方向均垂直于地面,双轴电机201靠近地面一端的输出轴上竖直向安装有用于钻孔的绞龙杆202,绞龙杆202底部贴近地面,当启动双轴电机201时,绞龙杆202会转动,控料装置5会使双轴电机201下移,从而带动绞龙杆202下移对地面进行钻孔。
26.如图5、图7和图8所示,在一些实施例中,拨料装置4包括自上而下依次贴合顶板403、转盘402、管道404、环形板405与导料管401,顶板403和环形板405固设于框架1上,转盘402通过转轴406转动安装在顶板403上,顶板403上构造有与储物筐3内部连通的入料孔,管道404固设在转盘402靠近环形板405的一面,环形板405固设在导料管401端部,当双轴电机201输出转动时,通过控料装置5带动转轴406转动,将位于储物筐3内的种子通过管道404转移至导料管401内,当绞龙杆202从开始钻孔一直到最深处且还没有复位时,控料装置5会使转盘402随转轴406转动一百八十度,此时管道404位于顶板403开口处,储物框内的种子颗粒会落到管道404内,当绞龙杆202从最深处开始复位到最初状态,控料装置5会使转盘402再随转轴406转一百八十度,此时管道404会回到原来的位置,种子颗粒会被带着一起转动过来,最后落入导料管401内,再顺着导料管401落入孔洞内,环形板405用于转盘402转动时托住种子颗粒,顶板403用于防止种子颗粒运送时抖落。
27.如图4、图5和图6所示,在一些实施例中,滑动导轨顶部与支架之间连接有套设在滑动导轨上的复位弹簧7,控料装置5包括蜗轮501、蜗杆502、锥齿轮一503、锥齿轮二504、半圆形齿轮505、齿条506,蜗杆502竖直安装于双轴电机201顶部的输出轴,蜗轮501通过支架转动安装于双轴电机201上,蜗轮501与蜗杆502啮合,半圆形齿轮505安装于蜗轮501连接轴的一端,半圆形齿轮505的一端与齿条506啮合,齿条506固设于框架1上,当双轴电机201工作时蜗杆502被带着转动,从而使得蜗轮501也跟随着转动,并带着半圆形齿轮505一起转动,由于半圆形齿轮505啮合有固定于框架1上的齿条506,在半圆形齿轮505转动的时候会下移,从而带动蜗轮501、蜗杆502、双轴电机201和绞龙杆202一起下移,实行自动钻孔,当半圆形齿轮505转动到极限点时,由于其本身半圆形的设计使得自身会与齿条506分离,此时会失去齿条506的束缚力,复位弹簧7会拉着支架带动双轴电机201上移复位,蜗轮501、蜗杆502、绞龙杆202和半圆形齿轮505会跟着上移,实现钻完孔自动复位,蜗杆502顶部转动安装有转帽507,锥齿轮一503安装于转轴406底部,锥齿轮二504通过杆体转动安装于框架1上,转帽507与锥齿轮二504之间设有摇杆一508与摇杆二509,摇杆一508一端水平向转动安装于转帽507顶部,摇杆二509一端与锥齿轮二504一端固定连接,摇杆一508另一端与摇杆二
509另一端通过铰接杆转动连接,转帽507在随着蜗杆502上下移动的时候会带着摇杆一508与摇杆二509运动,当双轴电机201不工作时,蜗轮501与半圆形齿轮505不会转动,此时由于复位弹簧7的拉力及摇杆一508与摇杆二509的束缚,电机与蜗轮501、蜗杆502及半圆形齿轮505一直处于向上受力且静止状态,此时摇杆一508与摇杆二509处于向上受力且绷直的状态,电机工作时,当转帽507带着摇杆一508与摇杆二509下拉到最低端时,此时摇杆一508与摇杆二509处于向下受力且绷直状态,这时,锥齿轮二504也被摇杆二509带着转动了一百八十度,由于啮合关系,锥齿轮一503也跟着转动了一百八十度,便带着转盘402转动一百八十度,当转帽507向上复位到最初状态时,锥齿轮二504被摇杆二509带着又会转动一百八十度,同理,转盘402又会转动一百八十度,转盘402两次转动一百八十度便实现了自动投放种子颗粒。
28.如图3所示,在一些实施例中,导板6水平方向呈v字型,其开口端朝向绞龙杆202钻孔点,使得框架1在移动的过程中,两边的土壤会更好的被推到中间,使得孔洞能更好的被盖住。
29.如图1所示,在一些实施例中,框架1还包括位于底部的车轮101以及给车轮101驱动的动力电机102,这样能使框架1更好的在地面上移动。
30.如图3所示,在一些实施例中,框架1一侧设置有把手8,人通过扶住把手8,有利于更好的控制框架1在地上移动的方向。
31.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1