一种无人车用割草机的割草装置的制作方法
1.本实用新型涉及割草设备技术领域,尤其是一种无人车用割草机的割草装置。
背景技术:
2.现有的割草车一般分为手推式和骑乘式,这些割草机都需要人工进行操作,在进行大范围的草坪除草时,人工需要长时间操作,加大了工作人员的劳动强度,继而耗费人力,对于面积较大的草地,人工割草需要大量的时间,不符经济效益,因此目前可通过无人割草车进行代替,无人割草车应用在大型草场草地修整作业中,比如牧场、高尔夫球场、机场草坪等,相对与人工割草,能够降低劳动降低,提高割草效率。
3.目前的无人割草车不能很好地适配各种地形的草地,因此无人割草车无法有效进行割草,而且容易对割草刀具造成破坏。当地面具有斜坡的时候,割草刀会与草地产生倾角,这样会出现割草不平整的情况,影响了割草效果,而且草地的美观,需要额外投入人力进行修缮。同时割草刀会与草地产生倾角时无人割草车会出现割草不完全或撞刀的情况。
技术实现要素:
4.为了解决上述问题,本实用新型提供一种无人车用割草机的割草装置,能够适配不同坡度地形,提高无人车割草的平整度和提高割草锯片的使用寿命。
5.为了实现上述目的,本实用新型采用的技术方案为:
6.一种无人车用割草机的割草装置,包括固定架、割草机构及割草锯片,
7.所述固定架一面设有连接架,且所述固定架通过所述连接架设置在无人车上,所述连接架包括第一架体及连接机构,所述第一架体的底部与所述固定架固定连接,所述第一架体通过连接机构与所述无人车连接;所述连接机构包括连接杆、伸缩连杆及调节电机,所述连接杆设有两个,且两所述连接杆位于所述第一架体靠近所述固定架一端的两侧,所述连接杆一端与所述固定架的一端转动连接,另一端与所述无人车固定连接,所述伸缩连杆一端滑动套设有滑动件,所述滑动件与所述第一架体远离所述固定架的一端转动连接,所述伸缩连杆远离所述滑动件的一端与所述无人车固定连接,所述滑动件通过调节电机驱动,以调节所述固定架倾斜度;
8.所述割草机构设置有多个,且所述割草机构设置在所述固定架背向所述连接架的一面上,所述割草机构包括第二架体及万向轮,所述第二架体的一端与所述固定架连接,另一端固定设置有割草电机,所述割草电机设有驱动轴,所述驱动轴朝远离所述第一架体方向穿出所述第二架体,所述驱动轴与所述割草锯片连接;
9.所述万向轮与所述第二架体远离所述固定架的一端连接,且所述万向轮与所述割草锯片相对设置。
10.进一步地,所述伸缩连杆远离所述无人车的一端固定设置有连接件,所述调节电机固定设置在所述伸缩连杆远离所述连接件的一端;
11.所述调节电机的驱动轴设置有螺纹杆,所述螺纹杆一端与所述调节电机传动连
接,所述滑动件固定设置有驱动件,所述螺纹杆另一端螺纹穿设于所述驱动件后与所述连接件转动连接,所述调节电机驱动所述螺纹杆转动,以使所述驱动件带动所述滑动件沿着所述伸缩连杆移动。
12.进一步地,所述第二架体包括第一支架、第二支架、支撑架及悬挂弹簧,所述第一支架与所述固定架固定连接,所述支撑架分别设置在所述第一支架的两侧,且所述第一支架通过所述支撑架与所述第二支架连接,且所述第一支架与所述第二支架相对设置,每一所述支撑架包括两相互铰接的支撑杆,所述支撑架一侧的两端分别与所述第一支架及所述第二支架转动连接,所述支撑架另一侧的两端分别与所述第一支架及所述第二支架转动滑动连接,通过调整两所述支撑杆之间的夹角,以调整所述第一支架与所述第二支架之间的间距;
13.两所述支撑架通过连接轴连接,所述连接轴的两端分别与对应所述支撑架的支撑杆固定连接,所述悬挂弹簧一端与所述连接轴连接,另一端与所述第一支架连接;
14.所述万向轮与所述第二支架的一端连接;所述割草电机设置在所述第二支架上,所述驱动轴朝远离所述第一支架方向穿出所述第二支架后与所述割草锯片连接。
15.进一步地,所述连接轴上固定设置有第一挂耳,所述第一支架固定设有有第二挂耳,所述悬挂弹簧的两端分别与所述第一挂耳及所述第二挂耳扣接。
16.进一步地,所述第二支架远离所述割草锯片的一端设有连接槽,所述连接槽的两端设有夹持件,所述夹持件一端与所述第二支架连接,另一端朝向所述第一支架的方向,且所述夹持件沿所述第一支架到所述第二支架方向设置有若干贯穿的固定孔;
17.两所述夹持件之间设有调节架,所述调节架一端的两侧分别设有调节件,所述调节件设有贯穿的调节槽,所述固定孔设有夹持螺钉,所述夹持螺钉能够穿设在所述固定孔及所述调节槽内,且所述夹持螺钉设有夹持螺母,通过所述夹持螺钉及所述夹持螺母对两所述夹持件进行夹持,以使两所述调节件固定夹持在两所述夹持件之间;
18.所述万向轮与所述调节架远离所述调节件的一端连接。
19.进一步地,所述割草锯片滑动套在所述驱动轴上,且所述驱动轴设有紧固螺母,所述紧固螺母与所述驱动轴螺纹连接,且所述紧固螺母与所述割草锯片抵接。
20.进一步地,所述固定架两端的割草机构设有防护栏,所述防护栏与所述第二支架连接。
21.本实用新型的有益效果是:
22.1.由于连接杆一端与固定架的一端转动连接,另一端与无人车固定连接,在调节电机的作用下,能够驱动滑动件在伸缩连杆上滑动,在滑动件的带动下,固定架能够进行偏转,从而实现对固定架倾斜度的调整,无人车能够根据草地的坡度,通过将固定架调整合适的倾斜度,以使割草锯片与草地保持水平,能够在不同坡度地形上进行平整地割草,提高无人车割草的平整度和提高割草锯片的使用寿命。而且多个割草机构能够实现大面积的同时割草,提高了割草效率。
23.2.由于支撑架通过两相互铰接的支撑杆构成,并且支撑架另一侧的两端分别与第一支架及第二支架转动滑动连接,使得第一支架与第二支架之间的距离能够进行调节;在悬挂弹簧的作用下,当万向轮陷入低洼或遇见突起时,第一支架与第二支架之间的距离自动调节,使得万向轮能够沿着低洼或遇见形状,从而使得割草锯片能够在低洼或突起的草
地上进行割草,提高无人车割草的完整度,无需额外投入人力进行修缮。而且固定架上设置有多个独立的割草机构,在确保割草完整度的同时增加了同时割草的面积。
24.3.通过拧松夹持螺母,使得调节件能够在调节架上一端,从而调整了万向轮与第二支架之间的距离,实现割草长度的调整;本实用新型的夹持件为钢材质,具有一定的弹性,当拧紧夹持螺母,夹持螺钉及夹持螺母对两夹持件进行夹持,实现将两调节件固定夹持在两夹持件之间,以使万向轮锁定在当前位置。
附图说明
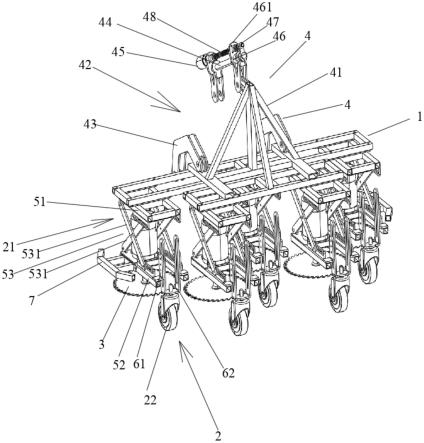
25.图1是本实用新型一较佳实施方式的无人车用割草机的割草装置的结构示意图。
26.图2是本实用新型一较佳实施方式的无人车用割草机的割草装置的连接架结构示意图。
27.图3是本实用新型一较佳实施方式的无人车用割草机的割草装置的割草机构结构示意图。
28.图4是本实用新型一较佳实施方式的无人车用割草机的割草装置的支撑架结构示意图。
29.图中,1-固定架,2-割草机构,21-第二架体,22-万向轮,3-割草锯片,31-割草电机,311
‑ꢀ
驱动轴,312-紧固螺母,4-连接架,41-第一架体,42-连接机构,43-连接杆,44-伸缩连杆, 45-调节电机,46-滑动件,461-驱动件件,47-连接件,48-螺纹杆,51-第一支架,52-第二支架,53-支撑架,531-支撑杆,54-悬挂弹簧,541-第一挂耳,542-第二挂耳,6-连接槽,61
‑ꢀ
夹持件,611-固定孔,62-调节架,621-调节件,622-调节槽,63-夹持螺钉,631-夹持螺母, 7-防护栏,701-栏体,702-滑动杆,703-防护边,71-放置槽,711-开口,72-锁定螺钉。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
32.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
33.请同时参见图1至图4,本实用新型一较佳实施方式的包括固定架1、割草机构2及割草锯片3。
34.固定架1一面设有连接架4,且固定架1通过连接架4设置在无人车上。
35.连接架4包括第一架体41及连接机构42,第一架体41的底部与固定架1固定连接,第一架体41通过连接机构42与无人车连接。
36.连接机构42包括连接杆43、伸缩连杆44及调节电机45,连接杆43设有两个,且两连接杆43位于第一架体41靠近固定架1一端的两侧,连接杆43一端与固定架1的一端转动连接,另一端与无人车固定连接,伸缩连杆44一端滑动套设有滑动件46,滑动件46与第一架体41远离固定架1的一端转动连接,伸缩连杆44远离滑动件46的一端与无人车固定连接,滑动件46通过调节电机45驱动,以调节固定架1倾斜度。
37.割草机构2设置有多个,且割草机构2设置在固定架1背向连接架4的一面上,割草机构2包括第二架体21及万向轮22,第二架体21的一端与固定架1连接,另一端固定设置有割草电机31,割草电机31设有驱动轴311,驱动轴311朝远离第一架体41方向穿出第二架体21,驱动轴311与割草锯片3连接。本实施例的割草机构2设置有5个。
38.万向轮22与第二架体21远离固定架1的一端连接,且万向轮22与割草锯片3相对设置。
39.由于连接杆43一端与固定架1的一端转动连接,另一端与无人车固定连接,在调节电机 45的作用下,能够驱动滑动件46在伸缩连杆44上滑动,在滑动件46的带动下,固定架1 能够进行偏转,从而实现对固定架1倾斜度的调整,无人车能够根据草地的坡度,通过将固定架1调整合适的倾斜度,以使割草锯片3与草地保持水平,能够在不同坡度地形上进行平整地割草,提高无人车割草的平整度和提高割草锯片的使用寿命。而且多个割草机构能够实现大面积的同时割草,提高了割草效率。
40.如图2所示,伸缩连杆44远离无人车的一端固定设置有连接件47,调节电机45固定设置在伸缩连杆44远离连接件47的一端;
41.调节电机45的驱动轴设置有螺纹杆48,螺纹杆48一端与调节电机45传动连接,滑动件46固定设置有驱动件461,螺纹杆48另一端螺纹穿设于驱动件461后与连接件47转动连接,调节电机45驱动螺纹杆48转动,以使驱动件461带动滑动件46沿着伸缩连杆44移动。
42.调节电机45驱动螺纹杆48转动,由于螺纹杆48与驱动件461螺纹连接,使得驱动件 461能够在螺纹杆48上移动,而滑动件46随之在伸缩连杆44移动,通过调整滑动件46在伸缩连杆44上的位置,实现固定架1的偏转调节。
43.如图3和图4所示,第二架体21包括第一支架51、第二支架52、支撑架53及悬挂弹簧 54,第一支架51与固定架1固定连接,支撑架53分别设置在第一支架51的两侧,且第一支架51通过支撑架53与第二支架52连接,且第一支架51与第二支架52相对设置,每一支撑架53包括两相互铰接的支撑杆531,支撑架53一侧的两端分别与第一支架51及第二支架52 转动连接,支撑架53另一侧的两端分别与第一支架51及第二支架52转动滑动连接,通过调整两支撑杆531之间的夹角,以调整第一支架51与第二支架52之间的间距。
44.本实施例的支撑架53的两支撑杆531中,一支撑杆531一端与第一支架51转动连接,另一端与第二支架52滑动连接,另一支撑杆531一端与第二支架52转动连接,另一端与第一支架51滑动连接,第一支架51及第二支架52均设置有滑轨,以使支撑杆531能够通过滑轨与对应的第一支架51及第二支架52滑动连接。
45.连接轴55上固定设置有第一挂耳541,第一支架51固定设有有第二挂耳542,悬挂弹簧 54的两端分别与第一挂耳541及第二挂耳542扣接。
46.两支撑架53通过连接轴55连接,连接轴55的两端分别与对应支撑架53的支撑杆531 固定连接,悬挂弹簧54一端与连接轴55连接,另一端与第一支架51连接。
47.如图3所示,连接轴55上固定设置有第一挂耳541,第一支架51固定设有有第二挂耳 542,悬挂弹簧54的两端分别与第一挂耳541及第二挂耳542扣接。
48.万向轮22与第二支架52的一端连接。
49.割草电机31设置在第二支架52上,驱动轴311朝远离第一支架51方向穿出第二支架 52后与割草锯片3连接。在割草电机31的作用下,能够驱动割草锯片3转动,以实现割草。
50.由于支撑架53通过两相互铰接的支撑杆531构成,并且支撑架53另一侧的两端分别与第一支架51及第二支架52转动滑动连接,使得第一支架51与第二支架52之间的距离能够进行调节;在悬挂弹簧54的作用下,当万向轮22陷入低洼或遇见突起时,第一支架51与第二支架52之间的距离自动调节,使得万向轮22能够沿着低洼或突起地形滚动,从而使得割草锯片3能够在低洼或突起的草地上进行割草,提高无人车割草的完整度,无需额外投入人力进行修缮。
51.而且固定架1上设置有多个独立的割草机构2,在确保割草完整度的同时增加了同时割草的面积,有效地提高了割草的效率。
52.如图4所示,第二支架52远离割草锯片3的一端设有连接槽6,连接槽6的两端设有夹持件61,夹持件61一端与第二支架52连接,另一端朝向第一支架51的方向,且夹持件61 沿第一支架51到第二支架52方向设置有若干贯穿的固定孔611。
53.两夹持件61之间设有调节架62,调节架62一端的两侧分别设有调节件621,调节件621 设有贯穿的调节槽622,固定孔611设有夹持螺钉63,夹持螺钉63能够穿设在固定孔611及调节槽622内,且夹持螺钉63设有夹持螺母631,通过夹持螺钉63及夹持螺母631对两夹持件61进行夹持,以使两调节件621固定夹持在两夹持件61之间;
54.万向轮22与调节架62远离调节件621的一端连接。
55.通过拧松夹持螺母631,使得调节件621能够在调节架62上一端,从而调整了万向轮22 与第二支架52之间的距离,实现割草长度的调整;本实施例的夹持件61为钢材质,具有一定的弹性,当拧紧夹持螺母631,夹持螺钉63及夹持螺母631对两夹持件61进行夹持,实现将两调节件621固定夹持在两夹持件61之间,以使万向轮24锁定在当前位置。
56.如图3所示,本实施例中的割草锯片3滑动套在驱动轴311上,且驱动轴311设有紧固螺母312,紧固螺母312与驱动轴311螺纹连接,且紧固螺母312与割草锯片3抵接。通过拧松紧固螺母312,能够对钝刀的割草锯片3进行更换。
57.本实施例中,固定架1两端的割草机构2设有防护栏7,防护栏7与第二支架52连接。防护栏7能够对的割草锯片3进行遮挡,防止固定架1两端的割草锯片3对周围的物品造成破坏,或防止对工作人员造成伤害。
58.在使用本实施例的无人车用割草机的割草装置时,通过连接架4将固定架1安装在无人车上。根据所需割草的长度,拧松夹持螺母631后,将调节架62移动至合适的位置,并且拧紧夹持螺母631,夹持螺钉63及夹持螺母631对两夹持件61进行夹持,实现将两调节件621 固定夹持在两夹持件61之间,对万向轮24锁定在当前位置。
59.无人车能够根据草地的坡度,控制调节电机45转动,调节电机45驱动螺纹杆48转动,使得驱动件461能够在螺纹杆48上移动,而滑动件46随之在伸缩连杆44移动,通过调整
滑动件46在伸缩连杆44上的合适位置,使固定架1的偏转至与草地坡度水平,并且通过割草锯片3进行割草。
60.在割草过程中,当万向轮22陷入低洼或遇到突起时,在悬挂弹簧54的弹力作用下,第一支架51与第二支架52之间的距离自动调节,万向轮24能够沿着低洼或突起滚动,以使割草锯片3能够配合地形低洼或突起进行割草。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1