玉米免耕播种机播深调节机构
1.本实用新型涉及玉米播种技术领域,尤其涉及玉米免耕播种机播深调节机构。
背景技术:
2.随着保护性耕作技术的大力推广和进一步发展,免耕播种技术的应用也越来越广泛,但目前我国免耕播种技术处于初期,播种机功能还不够完善。而播种是农业作业中一个非常重要的环节,播种的质量将直接影响作物的产量及经济效益。
3.由于连年的重复性耕种,以及秸秆全量还田导致土壤墒情各异,传统的直接将种子播种到土中,只要种子不暴露在外的播种方式,已经很难达到实际的种植效果。存在以下缺点:1、传统机械式播深力调节、位调节及力位综合调节等方式往往无法满足田间作业要求;2、通常需要人工来控制,不但劳动强度大,而且作业质量得不到保证。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的玉米播种深度调节不便的缺点,而提出的玉米免耕播种机播深调节机构。
5.为了解决现有技术存在的玉米播种深度调节不便的问题,本实用新型采用了如下技术方案:
6.玉米免耕播种机播深调节机构,包括免耕播种机,所述免耕播种机为水平横向放置,所述免耕播种机的顶部安装有种箱,所述种箱的底部安装有电控播种盘;所述免耕播种机的右侧设有纵向放置的牵引架,所述牵引架的中部安装有固定连接的固定架,所述固定架通过铰接的方式与免耕播种机活动连接,所述固定架的顶部安装有姿态传感器,所述固定架内安装有电动推杆。
7.优选地,所述免耕播种机上设有向上延伸的种箱支架,所述种箱的底部固定安装在种箱支架上。
8.优选地,所述种箱的底部开设有锥形下料口,所述电控播种盘的进料端与锥形下料口连通。
9.优选地,所述免耕播种机的底部设有纵向贯穿且转动连接的地轮轴,所述地轮轴的两端部套设有一对同心固接的地轮。
10.优选地,一对所述地轮之间预留有下料间隙,所述电控播种盘的排料端设有排料管,所述排料管的底端部延伸至下料间隙内。
11.优选地,所述免耕播种机的底部左端设有活动铰接的悬挂支架,所述悬挂支架的两侧设有一对镇压轮轴,每根所述镇压轮轴的外端部均套设有同心固接的镇压轮。
12.优选地,一对所述镇压轮之间的夹角为锐角,其角度为35
°
~70
°
。
13.优选地,所述免耕播种机的右端部设有开沟支架,所述开沟支架上插设有可升降调节的开沟器。
14.优选地,所述电动推杆的底端部与固定架的内壁活动铰接,所述电动推杆的伸缩
杆端部与免耕播种机的右上角活动铰接。
15.优选地,所述姿态传感器通过有线的方式分别与电动推杆、电控播种盘电性连接。
16.与现有技术相比,本实用新型的有益效果是:
17.1、在本实用新型中,通过采集姿态传感器数据以及控制电动推杆,电动推杆能及时做出反馈,将播种深度始终维持在可接受的播深范围内,实现玉米播种深度的稳定;
18.2、在本实用新型中,不仅能实时监测播种机播种深度,还能实现免耕播种机播种时播深深度一致、整齐均匀,提高免耕播种机智能化水平的目的。
附图说明
19.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
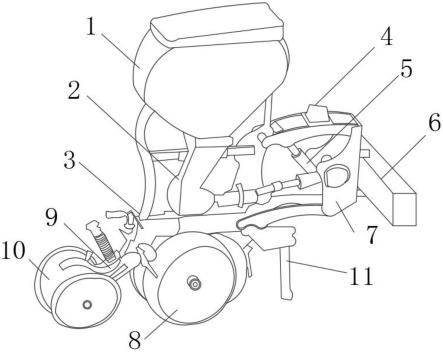
20.图1为本实用新型的结构示意图;
21.图2为本实用新型的主视图;
22.图3为本实用新型的播深调节pid闭环算法功能图;
23.图4为本实用新型的播深检测连接图;
24.图5为本实用新型的系统技术路线图;
25.图中序号:1、种箱;2、电控播种盘;3、免耕播种机;4、姿态传感器;5、电动推杆;6、牵引架;7、固定架;8、地轮;9、悬挂支架;10、镇压轮;11、开沟器。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.实施例1:本实施例提供了玉米免耕播种机播深调节机构,参见图1-5,具体的,包括免耕播种机3,免耕播种机3为水平横向放置,免耕播种机3的顶部安装有种箱1,种箱1的底部安装有电控播种盘2;免耕播种机3的右侧设有纵向放置的牵引架6,牵引架6的中部安装有固定连接的固定架7,固定架7通过铰接的方式与免耕播种机3活动连接,固定架7的顶部安装有姿态传感器4,固定架7内安装有电动推杆5,电动推杆5的底端部与固定架7的内壁活动铰接,电动推杆5的伸缩杆端部与免耕播种机3的右上角活动铰接,姿态传感器4通过有线的方式分别与电动推杆5、电控播种盘2电性连接。
28.在具体实施过程中,如图1和图2所示,免耕播种机3上设有向上延伸的种箱支架,种箱1的底部固定安装在种箱支架上,种箱1的底部开设有锥形下料口,电控播种盘2的进料端与锥形下料口连通,种箱1内的种子通过锥形下料口进入电控播种盘2内;
29.免耕播种机3的底部设有纵向贯穿且转动连接的地轮轴,地轮轴的两端部套设有一对同心固接的地轮8;一对地轮8之间预留有下料间隙,电控播种盘2的排料端设有排料管,排料管的底端部延伸至下料间隙内,电控播种盘2通过排料管顺着下料间隙掉落至土壤内。
30.在具体实施过程中,如图1和图2所示,免耕播种机3的底部左端设有活动铰接的悬
挂支架9,悬挂支架9的两侧设有一对镇压轮轴,每根镇压轮轴的外端部均套设有同心固接的镇压轮10,一对镇压轮10之间的夹角为锐角,其角度为35
°
~70
°
,通过一对镇压轮10进行覆土作业;
31.免耕播种机3的右端部设有开沟支架,开沟支架上插设有可升降调节的开沟器11,通过开沟器11进行开沟作业。
32.玉米播种调节机构的工作原理,如图1所示:
33.工作前姿态传感器4处于水平状态,当免耕播种机作业时,姿态传感器4与水平面产生一定的角度α,结合其他常量和参数后可得出播深,当达到设定播深时,电动推杆5开始持续向上推,稳定播种深度;
34.当传感器角度大于或小于角度α时,电动推杆能及时做出反馈,将播种深度始终维持在可接受的播深范围内;
35.其中,姿态传感器4采用维特智能的sins-485型号的传感器,电动推杆采用linak公司的la35型号,能够提供及时的控制反馈,并且功耗小,在播深调节中有着关键作用。
36.播深调节原理,如图3所示:
37.工控机作为整个机构的运算中心和指令下达中心,从上位机接收到设定参数后,通过串口与上位机进行指令交互。
38.工控机实时采集传感器角度数据并计算出相应的播深,当免耕播种机开始工作时,播深逐渐增大,当播深在预期范围内时,采用闭环pid控制,根据姿态传感器可得出当前播深,误差error则为当前播深与预期播深的差值,当误差越大时,需要电动推杆提供的力也就越大,由此引入参数kp,将误差值与推力表示成一个线性关系,同时为了播种解决作业时范围波动振荡,引入参数kd,将误差逐渐缩减但不为0。
39.最后,为了消除误差,引入参数ki,将播深控制在预期深度。整套系统采用48v锂电池经电源降压模块降压后分别进行供电,保证了系统工作的安全性和稳定性。
40.播深检测理论计算原理,如图4所示:
41.拖拉机三点铰接悬挂机构和深松铲以及免耕播种机的连接如图4,三点悬挂机构中的下拉杆一端与拖拉机铰接,铰接点为a,另一端与深松机铰接,铰接点为e,其中a、b为固定点。
42.深松机的后端接牵引梁,牵引梁与免耕播种机相连。三点悬挂机构由拖拉机提升臂驱动,控制提升或下落。
43.当提升臂提升或落下深松机时,铰接点d、e分别围绕铰接点b、a旋转,旋转半径为ae和bd。在旋转过程中,规定旋转角度顺时针方向为正,根据几何关系可知
44.θ=90
°‑
(α-β)
45.式中θ——点a、e、d形成的夹角
46.α——下拉杆中心线ae与水平面夹角
47.β——深松机架与水平面夹角
48.由上式可知,θ与α、β的差值成负相关关系。即θ越小,播种机入土越深。
49.根据在不同转角θ情况下的播深检测结果可知,播深与θ成反比,且与播深呈现出较好的线性关系。通过最小二乘法对数据进行线性拟合,得出拟合决定系数r2=0.9879。
50.因此建立播深检测模型为
51.depth=kθ+b+c
52.式中depth——播深,cm
53.k——斜率
54.b——截距,cm
55.c——误差补偿值,cm
56.由于θ与播深线性关系较为明显,在实际播深检测中,模型求解方法为:将深松作业机组停置于水平地面上,操纵拖拉机后悬挂机构,随机调整并人工测量播深depth,记录角度α和β,测量3次后通过最小二乘法求解k和b。误差补偿c的求解方法是:将播种机调整至初始状态,查看此时计算的播深,其相反数即为误差补偿值c。
57.免耕播种机播深调节系统工作原理,如图5所示:
58.免耕播种机播深调节系统由供电电源、工控机、上位机终端、电动推杆以及姿态传感器组成。
59.播深调节作业中,需要将姿态传感器水平平行安装在免耕播种机平行四杆机构顶端平行处;工控机作为整个系统的核心部分和运算中心,不仅实时采集传感器数据,还根据预期的播深与实际播深做出反馈调节,通过参数调试修正,使电动推杆能够及时调整播深,使免耕播种机播种深度处于预期播深范围内并进行播种,另一方面,上位机实时显示此时的播种深度供驾驶员观察。在上述过程中的通信指示灯会以相应的频率闪烁,以表明系统的正常工作。
60.本实用新型结合实际需求,玉米播种时种子的深度根据土壤的墒情而定,符合当地播种要求的播种深度,提高播种深度和播种效率。
61.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1