一种智能宠物喂食器的制作方法
1.本实用新型涉及宠物喂食器技术领域,具体为一种智能宠物喂食器。
背景技术:
2.随着国民经济水平的提高,人们的吃穿住行不仅得到了保障,就连各种小动物都有了不错的生活环境。很多年轻人都会养宠物,但是养了之后由于工作的繁忙,很少有时间去照顾宠物,甚至有时候没有时间添加宠粮。而宠粮是一种极易变质的食品,长时间的暴露会影响营养价值,甚至威胁宠物的健康,并且会有不必要的支出。还有一些老人也会养一只宠物陪伴着自己,但是由于高龄不能及时的喂养宠物甚至有时候给宠物倒点宠粮都很艰难。
3.基于此,我们提出了一种智能宠物喂食器。
技术实现要素:
4.(1)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种智能宠物喂食器,具备能够自动添加宠粮的优点。
6.(二)技术方案
7.为实现上述能够自动添加宠粮的目的,本实用新型提供如下技术方案:一种智能宠物喂食器,包括机壳,所述机壳的顶部可拆卸安装有储粮桶,所述储粮桶的底部固定安装有竖筒,所述竖筒内壁的底部固定安装有底板,所述底板上均匀开设有若干个下料孔,其中一个下料孔封闭;
8.所述机壳的内壁通过安装板固定连接有用于承托竖筒的分料盒,所述分料盒内转动设置有转动柱,所述转动柱的外壁均匀设置有若干个隔板;
9.所述分料盒的内底壁上与被封闭的下料孔的相对应位置处开设有下料槽,所述下料槽用于下料,所述分料盒的底部固定安装有用于引导下料的引导板,所述机壳上与引导板的末端相对应位置处开设有出粮口。
10.作为本实用新型的一种优选技术方案,所述储粮桶的顶部活动盖设有顶盖。
11.作为本实用新型的一种优选技术方案,所述顶盖的内顶壁上固定安装有干燥盒,所述干燥盒的底端敞口并通过封盖所封闭,所述封盖上设置有透气网。
12.作为本实用新型的一种优选技术方案,所述转动柱固定安装在驱动电机的输出轴顶部,所述驱动电机固定安装在分料盒的底部。
13.作为本实用新型的一种优选技术方案,还包括可拆卸安装在机壳上的食碗,食碗位于出粮口的下方。
14.作为本实用新型的一种优选技术方案,所述食碗上设置有第一磁块;
15.所述机壳上设置有与第一磁块相互吸引的第二磁块。
16.作为本实用新型的一种优选技术方案,所述底板的中心处转动设置有转动件,所
述转动件的中心处固定安装有竖轴,所述竖轴的外壁均匀设置有搅拌叶。
17.作为本实用新型的一种优选技术方案,所述竖轴的底端开设有卡槽,所述转动柱的顶部固定安装有与所述卡槽相耦合的卡柱。
18.作为本实用新型的一种优选技术方案,述隔板上活动卡设有卡套。
19.作为本实用新型的一种优选技术方案,所述机壳上还固定安装有控制面板,所述控制面板上设置有红外线感应器,所述红外线感应器的输出端电性连接有控制电路板,所述控制电路板的输出端与驱动电机的输入端电性连接。
20.(三)有益效果
21.与现有技术相比,本实用新型提供了一种智能宠物喂食器,具备以下有益效果:
22.1、该智能宠物喂食器,宠粮储存在储粮桶中,并会通过下料孔进入到相邻隔板组成的隔间中,其中,被封闭的下料孔其下方的隔间,并不会有宠粮进入,进而,下料槽中也不会有宠粮排出;
23.需要添加宠粮时,控制转动柱旋转,使前一个隔板转动至后一个隔板的位置即可,此时具有宠粮的隔间会与下料槽相对应,进而该隔间内的宠粮会通过下料槽排出,再通过引导板和出粮口进入到食碗中,达到添加宠粮的目的,而之前空的隔间,此时其位置与未封闭的下料孔相对应,能够通过下料孔向该隔间内添加宠粮;从而,通过控制转动柱的旋转,便能够自动、定量的向食碗中添加宠粮。
24.2、该智能宠物喂食器,当宠物的脑袋或嘴巴进入到红外线感应器的感应区域内时,红外线感应器会把信号传递至控制电路板,控制电路板接收到信号控制驱动电机运行,使其输出轴顶部的转动柱转动一定角度,从而达到自动添粮的效果,无需人工进行控制,宠物喂食更加的方便。
25.3、该智能宠物喂食器,转动柱旋转时,还会通过卡柱带动竖轴旋转,竖轴旋转带动搅拌叶旋转,搅拌叶旋转一方面能够防止竖筒内的宠粮堵塞,另一方面也能够起到清扫余粮的作用,能够使全部的宠粮都能够通过下料孔排出,防止有余粮堆积在底板上。
附图说明
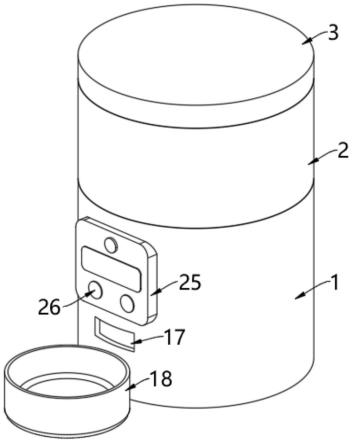
26.图1为本实用新型整体结构的立体示意图;
27.图2为本实用新型顶盖部分的放大示意图;
28.图3为本实用新型整体结构的剖视图;
29.图4为本实用新型整体结构的爆炸示意图;
30.图5为本实用新型底板部分的放大示意图;
31.图6为本实用新型图5中a处的放大示意图;
32.图7为本实用新型分料盒部分的放大示意图。
33.图中:1、机壳;2、储粮桶;3、顶盖;4、干燥盒;5、封盖;6、透气网;7、竖筒;8、底板;9、下料孔;10、安装板;11、分料盒;12、转动柱;13、驱动电机;14、隔板;15、下料槽;16、引导板;17、出粮口;18、食碗;19、转动件;20、竖轴;21、搅拌叶;22、卡槽;23、卡柱;24、卡套;25、控制面板;26、红外线感应器。
具体实施方式
34.实施例:
35.请参阅图1-图7,一种智能宠物喂食器,包括机壳1,机壳1的顶部可拆卸安装有储粮桶2,储粮桶2和机壳1的具体连接方式可以采用现有技术中的任何连接方式,如卡扣连接等,根据实际需要选择即可;
36.如图1所示,机壳1上拆卸安装有食碗18,食碗18位于出粮口17的下方,本实施例中,食碗18上设置有第一磁块,机壳1上设置有与第一磁块相互吸引的第二磁块,食碗18通过第一磁块与第二磁块之间的磁力,可拆卸的安装在机壳1上,使用起来更加的方便。
37.在储粮桶2的底部固定安装有竖筒7,竖筒7内壁的底部固定安装有底板8,底板8上均匀开设有若干个下料孔9,其中一个下料孔9封闭;
38.机壳1的内壁通过安装板10固定连接有用于承托竖筒7的分料盒11,分料盒11内转动设置有转动柱12,转动柱12的外壁均匀设置有若干个隔板14,若干个隔板14组成的若干个隔间,若干个隔间与若干个下料孔9一一对应,这样一来,储粮桶2内的宠粮便能够通过下料孔9进入到隔间中,其中,封闭的下料孔9,其对应的隔间中不会有宠粮进入;
39.如图5,分料盒11的内底壁上与被封闭的下料孔9的相对应位置处开设有下料槽15,下料槽15用于下料,分料盒11的底部固定安装有用于引导下料的引导板16,机壳1上与引导板16的末端相对应位置处开设有出粮口17;
40.宠粮储存在储粮桶2中,并会通过下料孔9进入到相邻隔板14组成的隔间中,其中,被封闭的下料孔9其下方的隔间,并不会有宠粮进入,进而,下料槽15中也不会有宠粮排出;
41.需要添加宠粮时,控制转动柱12旋转,使前一个隔板14转动至后一个隔板14的位置即可,此时具有宠粮的隔间会与下料槽15相对应,进而该隔间内的宠粮会通过下料槽15排出,再通过引导板16和出粮口17进入到食碗18中,达到添加宠粮的目的,而之前空的隔间,此时其位置与未封闭的下料孔9相对应,能够通过下料孔9向该隔间内添加宠粮;从而,通过控制转动柱12的旋转,便能够自动、定量的向食碗18中添加宠粮;
42.本实施例中,转动柱12固定安装在驱动电机13的输出轴顶部,驱动电机13固定安装在分料盒11的底部,通过控制驱动电机13的运行,便能够控制转动柱12的旋转,控制系统更加的简单。
43.如图1所示,机壳1上还固定安装有控制面板25,控制面板25上设置有红外线感应器26,红外线感应器26的输出端电性连接有控制电路板,控制电路板的输出端与驱动电机13的输入端电性连接;
44.当宠物的脑袋或嘴巴进入到红外线感应器26的感应区域内时,红外线感应器26会把信号传递至控制电路板,控制电路板接收到信号控制驱动电机13运行,使其输出轴顶部的转动柱12转动一定角度,从而达到自动添粮的效果,无需人工进行控制,宠物喂食更加的方便.
45.储粮桶2的顶部活动盖设有顶盖3,通过活动盖设的顶盖3,既便于向储粮桶2内添加宠粮,同时也能够保证密封性,防止宠粮受潮;
46.如图2所示,顶盖3的内顶壁上固定安装有干燥盒4,干燥盒4的底端敞口并通过封盖5所封闭,封盖5上设置有透气网6,可以在干燥盒4内放置干燥剂(如活性炭颗粒等),以起到防潮的作用。
47.如图6和图7所示,底板8的中心处转动设置有转动件19,转动件19的中心处固定安装有竖轴20,竖轴20的外壁均匀设置有搅拌叶21,竖轴20的底端开设有卡槽22,转动柱12的顶部固定安装有与卡槽22相耦合的卡柱23;
48.转动柱12旋转时,还会通过卡柱23带动竖轴20旋转,竖轴20旋转带动搅拌叶21旋转,搅拌叶21旋转一方面能够防止竖筒7内的宠粮堵塞,另一方面也能够起到清扫余粮的作用,能够使全部的宠粮都能够通过下料孔9排出,防止有余粮堆积在底板8上。
49.在本实施例中,转动柱12旋转时是定量出粮的,出粮的量取决于相邻两个隔板14间的隔间大小,因此,可选的,隔板14上活动卡设有卡套24,通过卡套24在隔板14上的卡设,能够改变隔板14的厚度,调整隔间的大小,进而控制定量出粮的量,达到可调节的目的;
50.在本实施例中,控制电路板还可通过无线通讯模块连接移动终端,通过移动终端控制驱动电机13的运行,达到远程控制(通过app)的目的;
51.在本实施例中,还可在控制电路板上集成定时模块,定时的控制驱动电机13的运行,以达到定时投放宠粮的目的;
52.在本实施例中,控制面板25上还设置有摄像头,可以对宠物进行远程监控,实时了解宠物的状况。
53.本实用新型的工作原理及使用流程:
54.宠粮储存在储粮桶2中,并会通过下料孔9进入到相邻隔板14组成的隔间中,其中,被封闭的下料孔9其下方的隔间,并不会有宠粮进入,进而,下料槽15中也不会有宠粮排出;
55.需要添加宠粮时,控制转动柱12旋转,使前一个隔板14转动至后一个隔板14的位置即可,此时具有宠粮的隔间会与下料槽15相对应,进而该隔间内的宠粮会通过下料槽15排出,再通过引导板16和出粮口17进入到食碗18中,达到添加宠粮的目的,而之前空的隔间,此时其位置与未封闭的下料孔9相对应,能够通过下料孔9向该隔间内添加宠粮;从而,通过控制转动柱12的旋转,便能够自动、定量的向食碗18中添加宠粮;
56.当宠物的脑袋或嘴巴进入到红外线感应器26的感应区域内时,红外线感应器26会把信号传递至控制电路板,控制电路板接收到信号控制驱动电机13运行,使其输出轴顶部的转动柱12转动一定角度,从而达到自动添粮的效果,无需人工进行控制,宠物喂食更加的方便;
57.转动柱12旋转时,还会通过卡柱23带动竖轴20旋转,竖轴20旋转带动搅拌叶21旋转,搅拌叶21旋转一方面能够防止竖筒7内的宠粮堵塞,另一方面也能够起到清扫余粮的作用,能够使全部的宠粮都能够通过下料孔9排出,防止有余粮堆积在底板8上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1