一种大蒜种芽播种方向调节装置
1.本实用新型涉及农业机械技术领域,尤其涉及一种大蒜种芽播种方向调节装置。
背景技术:
2.根据大蒜种植的农艺要求,播种时应保证种芽朝上,从而减少蒜种由于种芽不朝上而导致的蒜种腐烂和出芽不齐问题,提高大蒜播种的成功率与生长发育质量。在大蒜播种时,种芽是否向上在很大程度上影响大蒜的生长质量:播种时大蒜种芽向上,出苗早且整齐,鳞茎粗壮,植株高大,蒜头产量和品质显著提高;播种时植大蒜种芽水平,出苗时间较晚,鳞茎弯曲生长,鳞茎直径明显小于种芽向上播种的效果,蒜头有明显歪曲,品质下降;播种时大蒜种芽向下,出苗时间最晚,蒜苗虚弱且极易死亡。
3.为了保证大蒜的种芽朝上,在现有技术中,公开号为cn107306552a的专利提供了一种用于大蒜种植机的蒜种正反状态检测和调整装置,予以解决,其将两个半鸭嘴相互铰接,通过设置在的上方的弯板的移动来驱动其中一个半鸭嘴转动,从而实现种芽下落;由于弯板设置在两上半鸭的上方,会阻挡大蒜种芽进入到两半鸭嘴之间。公开号为cn205946555u的专利提供了精准控制大蒜鳞芽向上种植的装置,为了保证种芽朝上,需要在蒜种上涂设铁粉层,增加对于大蒜种芽的加工过程。
4.综上所述,如何在播种时便于调整大蒜种芽的朝向,是本领域亟待解决的重要问题之一。
技术实现要素:
5.本实用新型的目的是提供一种大蒜种芽播种方向调节装置,以解决现有技术中的问题,能够在播种时便于调整大蒜种芽的朝向。
6.本实用新型提供了一种大蒜种芽播种方向调节装置,包括支架、导向筒、翻转轴、换向夹、第一半斗和第二半斗;其中,
7.所述导向筒固定安装在所述支架上;所述翻转轴与所述支架转动连接,所述换向夹与所述翻转轴固定连接;
8.所述第一半斗和所述第二半斗均与所述换向夹连接;所述第一半斗与所述第二半斗能够配合形成内部内锥孔的调节斗;
9.所述第一半斗与所述第二半斗之间至少具有以下工作状态:
10.第一工作状态下,所述第一半斗与所述第二半斗抵接,所述锥孔沿从上到下的方向,直径逐渐变小;所述调节斗位于所述导向筒的正下方;
11.第二工作状态下,所述第一半斗与所述第二半斗向两左右两侧分离;
12.第三工作状态下,所述第一半斗与所述第二半斗抵接,所述锥孔沿从上到下的方向,直径逐渐变大;所述调节斗位于所述导向筒的正下方。
13.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述换向夹包括换向架、第一钳体、第二钳体和伸缩件;
14.所述换向架与所述翻转轴固定连接,所述第一钳体和所述第二钳体均与所述换向架转动连接,所述第一半斗与所述第一钳体固定连接,所述第二半斗与所述第二钳体固定连接;
15.所述伸缩件的一端与所述第一钳体连接,另一端与所述第二钳体连接,所述伸缩件用于驱动所述第一钳体与所述第二钳体,以实现所述第一半斗与所述第二半斗相互靠近或分开。
16.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述换向夹还包括第一限位块和第二限位块;
17.所述第一限位块和所述第二限位块均固定安装在所述换向架上,且位于所述第一钳体与所述第二钳体之间;
18.所述第一限位块用于对所述第一钳体限位,所述第二限位块用于对所述第二钳体限位;
19.当所述第一钳体抵靠在所述第一限位块上,且所述第二钳体抵靠在所述第二限位块上时,所述第一半斗与所述第二半斗处于所述第一工作状态。
20.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述换向夹还包括复位弹簧;
21.所述复位弹簧位于所述第一钳体与所述第二钳体之间;所述复位弹簧的一端与所述第一钳体连接,另一端与所述第二钳体连接。
22.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,还包括连接件,所述连接件的一侧与所述翻转轴固定连接;
23.所述连接件远离所述翻转轴的一端固定连接;第一工作状态下,所述翻转轴的中心线与所述调节斗的中心线垂直。
24.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述导向筒为锥筒;
25.所述导向筒内径沿从上到下的方向直径逐渐变小;
26.且所述导向筒下端的内径不大于所述调节斗内径较大端的内径。
27.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述换向架包括第一夹板、第二夹板和连接块;
28.所述第一夹板与所述第二夹板均与所述连接块固定连接;所述第一夹板与所述第二夹板平行设置,所述第一夹板与所述第二夹板之间设有用于安装所述第一钳体与所述第二钳体的安装区;
29.所述连接块与所述翻转轴固定连接。
30.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述导向筒内径较小的一端的内径不小于4厘米。
31.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述调节斗内径较小的一端的内径介于1-2厘米之间。
32.如上所述的大蒜种芽播种方向调节装置,其中,可选的是,所述伸缩件为液压杆、气压杆或电动伸缩杆。
33.与现有技术相比,本实用新型至少存在如下有益效果:
34.本实用新型通过设置导向筒,能够使经过导向筒的蒜种沿基本竖直的方向下落,
进入到由第一半斗和第二半斗抵接形成的调节斗内;位于调节斗内的蒜种只存在两种状态:鳞芽竖直向上或鳞芽竖直向下;当鳞芽竖直向上时,通过控制第一半斗和第二半斗处于第二工作状态,来实现蒜种的播种;当鳞芽竖直向下时,控制第一半斗和第二半斗快速由第一工作状态切换到第三工作状态,从而实现鳞芽方向的调整及播种。
35.相比于公开号为cn107306552a的专利,本实用新型不需要在调节斗的上方设置推动和第一半斗与第二半斗分离的结构,不影响蒜种从上方进入到调节斗内。
36.相比于公开号为cn205946555u的专利,本实用新型不需要通过磁吸来对蒜种进行调向,不需要设置铁粉层,能够减少对于蒜种的加工过程。
附图说明
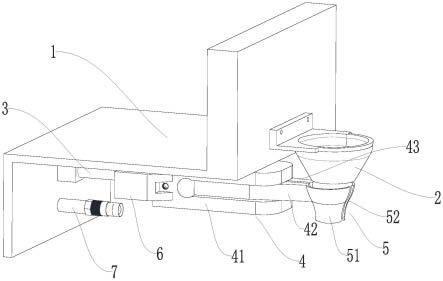
37.图1为本实用新型提出的大蒜种芽播种方向调节装置的整体结构示意图;
38.图2为本实用新型提出的大蒜种芽播种方向调节装置的立体图;
39.图3为本实用新型提出的换向夹的拆解图;
40.图4为本实用新型提出的换向架与翻转轴的安装结构示意图;
41.图5为本实用新型提出的第一钳体与第一半斗的安装结构示意图;
42.图6为本实用新型提出的第二钳体与第二半斗的安装结构示意图;
43.图7为本实用新型提出的导向筒的立体图;
44.图8为本实用新型提出的换向夹的立体图。
45.附图标记说明:
46.1-支架,2-导向筒,3-翻转轴,4-换向夹,5-调节斗,6-连接件,7-检测器;
47.41-换向架,42-第一钳体,43-第二钳体,44-伸缩件,45-复位弹簧;
48.411-第一夹板,412-第二夹板,413-连接块;
49.51-第一半斗,52-第二半斗。
具体实施方式
50.下面详细描述本实用新型的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能解释为对本实用新型的限制。
51.实施例1
52.请参照图1至图8,本实施例提出了一种大蒜种芽播种方向调节装置,包括支架1、导向筒2、翻转轴3、换向夹4、第一半斗51和第二半斗52;其中,支架1用于为导向筒2、翻转轴3提供支撑。导向筒2起到导向作用,将进入到导向筒2的蒜种以基本竖直的状态排出。翻转轴3用于驱动换向夹4转动,以带动一半斗51和第二半斗52转动。
53.具体地,导向筒2固定安装在支架1上;翻转轴3与支架1转动连接,换向夹4与翻转轴3固定连接。具体实施时,导向筒2的位置高于翻转轴3的高度。换向夹4能够在翻转轴3的带动下翻转180度。
54.在具体实施时,请参照图1到图3,第一半斗51和第二半斗52均与换向夹4连接。即,第一半斗51与第二半斗52能够在换向夹4的带动下作180度翻转。第一半斗51与第二半斗52能够配合形成内部内锥孔的调节斗5;在具体实施时,第一半斗51和第二半斗52可以是一个
锥形斗沿中心线剖切成两部分,形成第一半斗51和第二半斗52。
55.在具体实施时,第一半斗51与第二半斗52之间至少具有以下工作状态:
56.第一工作状态下,第一半斗51与第二半斗52抵接,锥孔沿从上到下的方向,直径逐渐变小;调节斗5位于导向筒2的正下方。此状态下,用于盛接由导向筒2落下的蒜种,并利用第一半斗51与第二半斗52的形状,使蒜种处于基本竖直向上或竖直向下的状态。
57.第二工作状态下,第一半斗51与第二半斗52向两左右两侧分离。当第一半斗51与第二半斗52向两侧分离时,能够使得第一半斗51与第二半斗52分开,使其中的蒜种下落。此处所指的向左右两侧分离,是指,第一半斗51与第二半斗52向互相远离的方向分离。
58.第三工作状态下,第一半斗51与第二半斗52抵接,锥孔沿从上到下的方向,直径逐渐变大;调节斗5位于导向筒2的正下方。在第三工作状态下,锥孔沿从上到下的方向直径逐渐变大,因而,位于调节斗5内的蒜种能够在重力作用下下落,以实现播种。
59.在具体实施时,将蒜种逐个投入到导向筒2内,当蒜种进入到导向筒2内时,由于导向筒2为锥孔,且导向筒2的上端内径大于下端的内径,当蒜种沿导向筒2的内壁下落时,能够逐渐调节为基本竖直状态,具体地,可以是竖直向上的状态,也可以是竖直向下的状态。导向筒2的作用对蒜种进行导向,避免蒜种横向下落,防止蒜种横向卡在调节斗5内。
60.当蒜种经过导向筒2后直接下落到第一工作状态下的调节斗5内。经过导向筒2,蒜种在进入调节斗5内的状态为基本竖直的状态。如此,当蒜种进入到调节斗5内后,处于竖直状态。即,蒜种竖直朝上或竖直朝下。
61.对于竖直朝上的蒜种,即,对于鳞芽朝上根部朝下的蒜种,直接将第一半斗51和第二半斗52由第一工作状态切换到第二工作状态,蒜种以竖直朝上的状态落下。然后再将第一半斗51与第二半斗52切换到第一工作状态。
62.对于竖直朝下的蒜种,即,对于鳞芽朝下根部朝上的蒜种,将第一半斗51和第二半斗52由第一工作状态切换到第三工作状态,此时,调节斗5的大端向下,蒜种180度翻转,达到鳞芽朝上,根部朝下的状态,并在自身重力作用下下落。然后再将第一半斗51与第二半斗52切换到第一工作状态。
63.在具体实施时,调节斗5的翻转由翻转轴3来实现,即,将翻转轴3翻转180度,即可实现调节斗5的上下翻转。使调节斗5由第一工作状态切换到第三工作状态或由第三工作状态切换到第一工作状态。
64.在将调节斗5由第一工作状态切换到第一工作状态时,所用的时间以不大于0.3秒为佳。如此,能够避免由于翻转过慢而导致蒜种提前掉落。
65.第一半斗51与第二半斗52之间的分离与相互抵靠,是由换向夹4来实现的。在具体实施时,换向夹4包括换向架41、第一钳体42、第二钳体43和伸缩件44。换向架41用于为整个换向夹4提供支撑。第一钳体42和第二钳体43均为杆状,二者配合形成一个夹钳,伸缩杆44用于控制第一钳体42与第二钳体43之间的相互夹紧或分离,进而实现第一半斗51与第二半斗52之间的抵接或分离。
66.具体地,换向架41与翻转轴3固定连接,在具体实施时,换向架41可以是与翻转轴3固定连接,也可以是将换向架41与翻转轴3之间通过其他部件固定连接。当换向架41与翻转轴3之间直接固定连接时,二者之间的连接方式可以是焊接、螺栓连接等。
67.在具体实施时,第一钳体42和第二钳体43均与换向架41转动连接,第一钳体42与
换向架41的转动中心线和第二钳体43与换向架41的转动中心线平行。
68.具体实施时,第一钳体42的中部设有第一销轴,第一钳体42通过第一销轴与换向架41转动连接;第二钳体43的中部设有第二销轴,第二钳体43通过第二销轴与换向架41转动连接。
69.第一半斗51与第一钳体42的一端固定连接,第二半斗52与第二钳体43的一端固定连接。具体地,以第一半斗51与第二半斗52能够相互抵接形成调节斗5为准。
70.更具体地,请参照图3,伸缩件44的一端与第一钳体42连接,另一端与第二钳体43连接,伸缩件44用于驱动第一钳体42与第二钳体43,以实现第一半斗51与第二半斗52相互靠近或分开。在具体实施时,伸缩件44的一端与第一钳体42远离第一半斗51的一端铰接;伸缩件44的另一端与第二钳体43远离第二半斗52的一端铰接。
71.通过伸缩件44,能够驱动第一钳体42与第二钳体43,以实现第一半斗51与第二半斗52在第一工作状态与第二工作状态之间的切换,以及第二工作状态与第三工作状态之间的切换。
72.通过以上的结构,在具体实施时,当第一钳体42的转动与第二钳体43的转动不协调时,可能会存在第一半斗51与第二半斗52无法正对,且不能准确地位于导向筒2的正下方的情况,为了解决这个问题,在本实施例中,换向夹4还包括第一限位块和第二限位块。第一限位块用于限制第一钳体42的位置,第二限位块用于限制第二钳体43的位置。
73.第一限位块和第二限位块(图中未示出)均固定安装在换向架41上,且位于第一钳体42与第二钳体43之间。具体实施时,第一限位块和第二限位块均位于第一钳体42与第二钳体43之间。具体地,第一限位块用于对第一钳体42限位,第二限位块用于对第二钳体43限位。实施时,当第一钳体42抵靠在第一限位块上,且第二钳体43抵靠在第二限位块上时,第一半斗51与第二半斗52处于第一工作状态。即,第一限位块和第二限位块仅从内部限制第一钳体42和第二钳体43的位置,而当第一半斗51与第二半斗52相互远离时,第一限位块和第二限位块不限制第一钳体42与第二钳体43的位置。
74.通过设置第一限位块和第二限位块,一方面能够使第一半斗51与第二半斗52抵接后形成的调节斗5位于导向筒2的正下方,另一方面能够在将第一半斗51和第二半斗52切换至第一工作状态时,防止第一半斗51与第二半斗52之间产生过大的碰撞力。
75.在具体实施时,第一半斗51与第二半斗52之间的靠近和分离,可以是完全由伸缩件44的伸长和缩短来实现。
76.在一种实现方式中,也可以将第一半斗51与第二半斗52之间的分离由伸缩杆44的伸长来控制,将第一半斗51与第二半斗52之间的靠近由其他部件来实现。具体地,换向夹4还包括复位弹簧45。
77.具体地,复位弹簧45为螺旋弹簧,复位弹簧45位于第一钳体42与第二钳体43之间;复位弹簧45的一端与第一钳体42连接,另一端与第二钳体43连接。复位弹簧45用于产生弹力,以驱动第一钳体42抵靠在第一限位块上,驱动第二钳体抵靠在第二限位块上。
78.具体地,为了方便翻转轴3与翻转夹4固定连接,还包括连接件6,连接件6的一侧与翻转轴3固定连接。具体实施时,连接件6可以是与翻转轴3一体成型。更具体地,连接件6远离翻转轴3的一端与换向夹4固定连接;第一工作状态下,翻转轴3的中心线与调节斗5的中心线垂直。连接件6与换向夹4之间螺栓连接或者卡接。
79.在具体实施时,导向筒2为锥筒;导向筒2内径沿从上到下的方向直径逐渐变小。且导向筒2下端的内径不大于调节斗5内径较大端的内径。如此设置,能够使蒜种沿导向筒2的侧壁滑出时,处于基本竖直的状态。再配合调节斗5,能够使蒜落入调节斗5内后,蒜种处于竖直状态。
80.在具体实施时,请参照图3,换向架41包括第一夹板411、第二夹板412和连接块413。即,第一夹板411、第二夹板412和连接块413形成一个u形结构。具体地,第一夹板411与第二夹板412均与连接块413固定连接;第一夹板411与第二夹板412平行设置,第一夹板411与第二夹板412之间设有用于安装第一钳体42与第二钳体43的安装区;连接块413与翻转轴3固定连接。具体地,连接块413可以是直接与翻转轴3固定连接,也可以是通过连接件6与翻转轴3固定连接。
81.在具体实施时,为了保证蒜种能够从导向筒2内顺利落下,导向筒2内径较小的一端的内径不小于4厘米。
82.在具体实施时,为了防止当调节斗5处于第一工作状态时,蒜种不会从调节斗5内直接掉落,调节斗5内径较小的一端的内径介于1-2厘米之间。
83.在具体实施时,伸缩件44为液压杆、气压杆或电动伸缩杆。
84.实施例2
85.本实施例是在实施例1的基础上所作的进一步改进。相同之处不再赘述,以下仅对不同之处予以说明。
86.请参照图1到图8,在实施例1的基础上,本实施例还增设了检测器7,检测器7用于检测第一工作状态下,调节斗5内的蒜种的朝向。
87.检测器7为光电传感器,当电传感器安装在支架1上。当蒜种竖直向下时,蒜种的外皮朝下,伸出调节斗5的下端口。第一工作状态下,当光电传感器检测到调节斗5下端有物体伸出时,便将蒜种的状态识别为方向朝下。通过控制翻转轴3的转动,切换到第三工作状态,从而实现对于蒜种的方向调节。在具体实施时,光电传感器的型号为tcrt5000。
88.在具体实施时,翻转轴3与一电机的转动固定连接,通过控制电机来实现翻转轴3的转动。
89.为了实现以上动作效果,本实施例还选用一控制器,控制器与光电传感器、电机、伸缩件电连接,控制器通过光电传感器获取检测信号,当检测结果为蒜种方向向下时,控制电机转动180度,将第一半斗51与第二半斗52切换到第三位置状态。间隔0.5到2秒后,将第一半切换到第一位置状态。当检测结果为蒜种方向向上时,控制伸缩件压缩,使第一半斗51与第二半斗52分离,蒜种自由下落。间隔0.5到2秒后,解除对于伸缩件的控制,在复位弹簧45的作用下,使第一半斗51与第二半斗52恢复到第一位置状态。具体实施时,在设计的过程中,控制器选用stm32单片机。
90.在具体实施时,若控制件为液压杆或气压杆,控制器与用于控制液压杆或气压杆的电磁阀电连接。
91.以上依据图式所示的实施例详细说明了本实用新型的构造、特征及作用效果,以上仅为本实用新型的较佳实施例,但本实用新型不以图面所示限定实施范围,凡是依照本实用新型的构想所做的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1