一种插秧机无人驾驶机械控制结构的制作方法
本技术涉及插秧机无人驾驶,更具体地说,涉及一种插秧机无人驾驶机械控制结构。
背景技术:
1、目前高速插秧机一般都采用人工手动驾驶操作,插秧机插秧时作业环境恶劣,地块条件复杂,泥脚深浅不一,对驾驶员插秧水平要求很高,况且长时间插秧对驾驶员易产生疲劳,对插秧作业质量造成影响容易造成重行,漏插等问题,造成水稻减产。
2、针对此种技术缺陷问题,本发明的目的是解决现有技术中插秧费时费力问题,降低人工成本,提高作业质量并使作物增产。本发明提出一种人工驾驶插秧和无人驾驶插秧系统并存的机械结构实现解决上述问题,在插秧直行无人驾驶状态下驾驶员可以进行加秧等工作可以减少机器上加秧人员,减少插秧雇佣人力成本,提高收益。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本实用新型的目的在于提供一种插秧机无人驾驶机械控制结构,它可以实现,在插秧直行无人驾驶状态下驾驶员可以进行加秧等工作可以减少机器上加秧人员,减少插秧雇佣人力成本,提高收益。
3、2.技术方案
4、为解决上述问题,本实用新型采用如下的技术方案。
5、一种插秧机无人驾驶机械控制结构,包括:
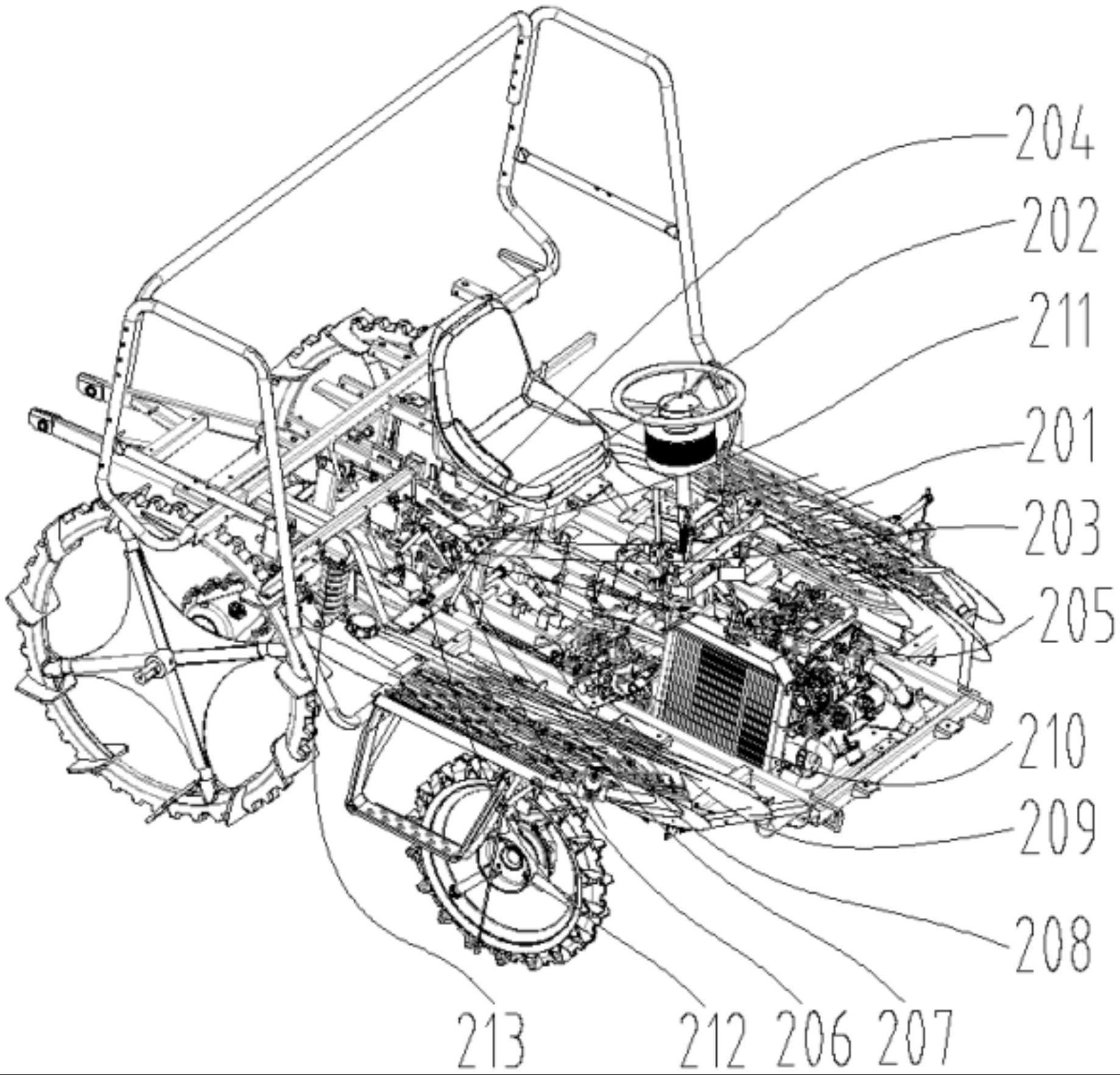
6、无人驾驶行走系统机械控制结构,所述无人驾驶行走系统机械控制结构设置在发动机后侧和座椅前侧的空间位置处,机身的中前端位置,该结构用于控制插秧机的前进后退;
7、无人驾驶插秧作业机械控制结构,所述无人驾驶插秧作业机械控制结构设置在机体座椅端的右手侧,该结构用于控制插秧机的插秧作业。
8、进一步的,所述无人驾驶行走系统机械控制结构包括方向盘支架、方向盘、转向电机、变速手柄、档位齿臂板、弹簧臂组件、档位槽板、转臂压杆、导向板、离合拉杆组件、安装座、分离转杆、回位板、拉伸弹簧、连杆组件、切换臂、行走角度传感器、连接板、hst转臂、球头、丝杆、行走推杆电机、行走电机连接套、转向轴、液压转向器、行走电机槽板焊接件、隔套和传感器座板,所述的方向盘支架安装在变速箱的上方的液压转向器上,转向轴下端安装在液压转向器的花键内,转向轴上端安装在方向盘支架的圆管内,转向电机安装在方向盘支架上方和转向轴上,方向盘安装于转向电机上,档位齿臂板安装于方向盘支架左侧的两孔内,档位齿臂板下端上设置有若干个前进后退档齿状卡槽,转臂压杆安装在档位齿臂板的纵向前后两孔内,变速手柄安装在档位齿臂板的两孔上,弹簧臂组件安装在方向盘支架左侧的侧壁上的向内侧折弯的耳板上,弹簧臂组件有弹性并设置有滚珠用于卡住档位齿臂板上的各个档位齿状卡槽,回位板安装在档位齿臂板右侧的轴上,回位板下端的销上和方向盘支架上方的折弯钢筋上设置安装有回位弹簧,档位槽板安装在方向盘支架左侧的侧壁上,转臂压杆的下端伸入档位槽板上的z型槽孔内,导向板安装套在档位槽板上的销轴上,分离转杆下端安装在变速箱的孔内,其下端伸出部连接在变速箱上的分离臂上,分离臂作用于变速箱内部的分离机构,用于改变变速箱内的插秧开始和停止动作,分离转杆上端安装套在安装座的孔内,分离转杆上端伸出部连接在离合拉杆组件的一端,离合拉杆组件的另一端安装在导向板上,切换臂安装在方向盘支架下端的折弯伸出部处,连杆组件上端安装在档位齿臂板上的圆孔内,连杆组件上端安装在切换臂上的孔内,行走角度传感器安装在方向盘支架左侧的传感器座板上,传感器座板安装在方向盘支架左侧的档位槽板的两孔上,连接板的上端安装在行走角度传感器上,连接板的下端安装在离合拉杆组件折弯处,所述的hst转臂安装在液压行走无极变速器轴上,hst转臂水平旋转时改变液压行走无极变速器内的马达和泵的流量从而改变hst输出到变速箱的转速大小,改变行走速度,球头的一端安装在hst转臂上,球头和行走电机连接套中间设置安装有丝杆,行走电机连接套连接安装在行走推杆电机的前端伸缩端,行走推杆电机的尾端通过销轴装配在插秧机机架上的行走电机槽板焊接件上,行走电机槽板上设置有的“u”型槽口卡扣在机架的方管上,“u”型槽口下端安装螺栓进行固定,隔套安装在螺栓中间。
9、进一步的,所述无人驾驶插秧作业机械控制结构包括手柄导板、固定座、转轴齿板、传感拉线板、阀拉板、连杆、摆动轴板、球头连杆组件、分离臂板、插秧分离销、插秧手柄、插秧齿板转动机构、插秧电机支撑架、插秧推杆电机组件、转臂拉板,所述固定座材质为铝合金铸件,其安装在插秧机机架右侧壁板上,手柄导板安装在固定座上,转轴齿板贯穿安装在固定座的下端的孔内,传感拉线板和阀拉板分别安装在转轴齿板的轴外侧,传感拉线板设置在转轴齿板和阀拉板的中间位置,摆动轴板安装在插秧机架右侧横梁上的圆管内,所述转臂拉板安装在转轴齿板内侧轴端处,且位于机架两侧壁的中间位置处,连杆两端分别安装在转轴齿板和摆动轴板上,所述分离臂板安装在变速箱右侧伸出部的耳孔上且可旋转运动,所述球头连杆组件前后端分别安装在分离臂板和摆动轴板上,所述插秧分离销露出的外侧轴上的卡槽端卡在分离臂板的上下臂板上,插秧分离销内侧插入变速箱体内部的离合器内,用于插秧动作的分离,插秧分离销向内插入插秧停止,插秧分离销拔出时插秧开始,所述插秧齿板转动机构设置安装在插秧机体机架右侧横向方梁上,所述插秧手柄下端安装在插秧齿板转动机构内,插秧手柄上端贯穿过手柄导板的槽孔内可在槽孔内上下手动操作进行插秧作业,所述插秧电机支撑架安装在插秧机体后桥弹簧支撑座上,插秧推杆电机尾端安装在插秧电机支撑架上,插秧推杆电机组件伸缩端安装在转臂拉板上,机构原理:插秧推杆电机伸缩推动转轴齿板转动,通过连杆进一步使摆动轴板转动,进一步通过联动使插秧分离销伸入和拔出实现插秧作业,在无人驾驶状态下,插秧推杆电机在作业前提前设置好的无人作业路径规划中收到作业控制指令后可以实现插秧推杆电机自动伸缩,当推杆电机组件收缩变短时拉动转臂拉板进而实现插秧作业,当推杆电机伸出变长时推动转臂拉板进而实现插秧停止,并实现插秧台上升,尤其在路径规划指令中,如果路径规划要转向转弯时可实现自动使推杆电机伸出变长而实现插秧台上升并停止插秧。
10、进一步的,所述插秧齿板转动机构包括齿臂转板、支架、槽板、滚珠、短拉簧、插秧角度传感器、拉板、传感器转板,所述齿臂转板安装在支架上,齿臂转板上设置有四个齿槽位,分别为插秧齿槽,下降齿槽,中立齿槽和上升位,槽板安装在支架上的销轴上,所述滚珠安装在槽板上的销轴上,短拉簧一端钩在支架的孔内,另一端钩在槽板上,通过掰动插秧手柄,在短拉簧拉伸压紧作用下使齿臂转板的三个齿槽位分别可固定压紧在滚珠上,所述插秧角度传感器安装在支架上,传感器转板用开口销安装在插秧角度传感器背面的转轴孔上,所述拉板的上端安装在齿臂转板上的销轴上,拉板的下端安装在传感器转板的伸出部臂板上,机构原理:在有人驾驶手动插秧模式下,当掰动插秧手柄时,当齿臂转板在不同的四个齿槽位时,在拉板和传感器转板联动作用下,可以使插秧角度传感器检测到不同的角度信号值,通过插秧角度传感器发送角度指令到控制系统,控制系统进而发送相应的指令到插秧推杆电机上,使插秧推杆电机进行伸出或收缩动作,进而控制插秧开始和停止动作。
11、3.有益效果
12、相比于现有技术,本实用新型的优点在于:
13、(1)本方案可降低人工成本,提高作业质量并使作物增产。
14、(2)本方案可实现人工驾驶插秧和自动驾驶插秧两种状态并存使用,可靠度高。
- 还没有人留言评论。精彩留言会获得点赞!