固态有机肥高效施肥机及其高效施肥方法、装置
本发明涉及固态有机肥高效施肥领域,具体而言,涉及固态有机肥高效施肥机及其高效施肥方法、装置。
背景技术:
1、丘陵山区地形复杂,对于无人化农业机械作业提出了更高的要求,目前固态有机肥的施肥方式大多采用人工施肥,对于丘陵山区尤其是地形条件复杂的种植区域,人工施肥困难且危险,若继续采用人工施肥,则无法更充分利用种植区域或者将工人置于危险境地。也就是说,对于地形复杂的丘陵山区,目前固态有机肥的施肥存在人工施肥效率低的缺陷亟待解决。本技术的发明人长期从事山地无人种植相关工作,提出了固态有机肥高效施肥处理方法。
技术实现思路
1、本发明的目的包括,例如,提供一种固态有机肥高效施肥机及其高效施肥方法、装置,其能够使固态有机肥施肥更加高效,有利于实现固态有机肥施肥的智能化。
2、本发明的实施例可以这样实现:
3、第一方面,本发明实施例提供一种固态有机肥高效施肥方法,用于固态有机肥高效施肥装置,所述固态有机肥高效施肥装置包括固态有机肥高效施肥机和固态有机肥补充飞行器,所述固态有机肥高效施肥机用于向作业区域施固态有机肥,所述固态有机肥补充飞行器用于向所述施肥机模块补充固态有机肥,所述固态有机肥高效施肥方法包括:
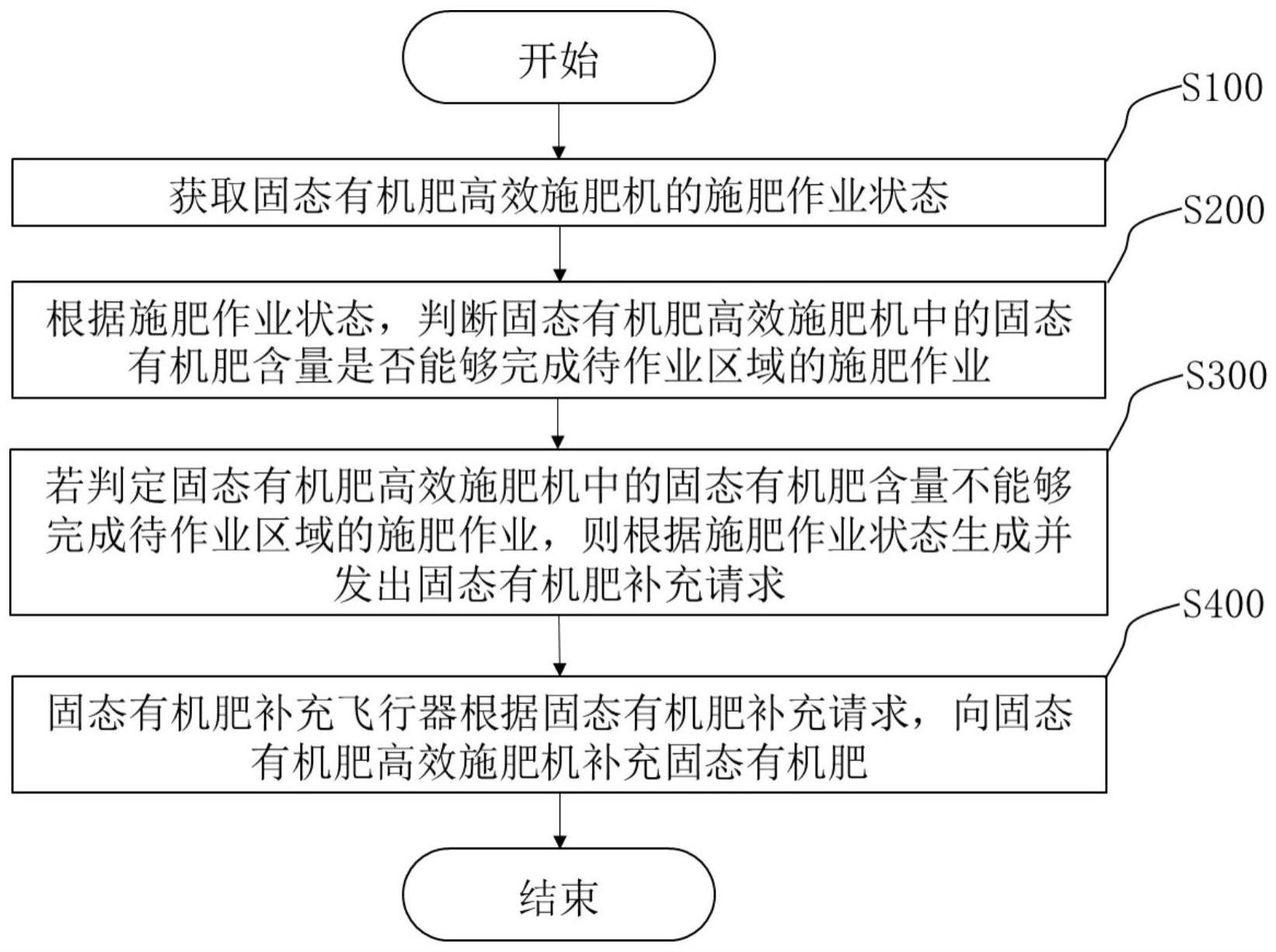
4、获取所述固态有机肥高效施肥机的施肥作业状态,其中,所述施肥作业状态包括所述固态有机肥高效施肥机中的固态有机肥余量和消耗量、以及所述固态有机肥高效施肥机的已作业区域和待作业区域;
5、根据所述施肥作业状态,判断所述固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业;
6、若判定所述固态有机肥高效施肥机中的固态有机肥含量不能够完成待作业区域的施肥作业,则根据所述施肥作业状态生成并发出固态有机肥补充请求,所述固态有机肥补充请求包括需要补充的固态有机肥的量;
7、所述固态有机肥补充飞行器根据所述固态有机肥补充请求,向所述固态有机肥高效施肥机补充固态有机肥。
8、进一步地,在可选的实施例中,所述根据所述施肥作业状态,判断所述固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业的步骤包括:
9、根据所述固态有机肥高效施肥机中的固态有机肥的消耗量和已作业区域,分析在作业区域所述固态有机肥高效施肥机的固态有机肥的消耗量与已作业区域之间的相关关系;
10、根据所述相关关系以及所述固态有机肥高效施肥机中的固态有机肥的余量和待作业区域,判断所述固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业。
11、进一步地,在可选的实施例中,所述固态有机肥高效施肥机的固态有机肥的消耗量与已作业区域之间的相关关系包括所述固态有机肥的消耗量与已作业区域面积之间的比例关系。
12、进一步地,在可选的实施例中,所述固态有机肥补充飞行器根据所述固态有机肥补充请求,向所述固态有机肥高效施肥机补充固态有机肥的步骤包括:
13、获取所述固态有机肥高效施肥机的当前作业位置和作业路径;
14、根据所述固态有机肥高效施肥机的当前作业位置和作业路径,控制所述固态有机肥补充飞行器的飞行状态,其中,所述固态有机肥补充飞行器的飞行状态与所述固态有机肥高效施肥机的作业路径对应,以使所述固态有机肥补充飞行器逐渐靠近所述固态有机肥高效施肥机,从而使所述固态有机肥补充飞行器与所述固态有机肥高效施肥机对接。
15、本发明实施例提供的固态有机肥高效施肥方法具有以下有益效果:该固态有机肥高效施肥方法通过获取固态有机肥高效施肥机固态有机肥余量和消耗量、以及固态有机肥高效施肥机的已作业区域和待作业区域等施肥作业状态,判断固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业;若判定固态有机肥高效施肥机中的固态有机肥含量不能够完成待作业区域的施肥作业,则根据施肥作业状态生成并发出固态有机肥补充请求,固态有机肥补充请求包括需要补充的固态有机肥的量;固态有机肥补充飞行器根据固态有机肥补充请求,向固态有机肥高效施肥机补充固态有机肥,从而使固态有机肥施肥更加高效,有利于实现固态有机肥施肥的智能化。
16、第二方面,本发明实施例提供一种固态有机肥高效施肥机,用于固态有机肥高效施肥装置,所述固态有机肥高效施肥机包括:
17、获取模块:用于获取所述固态有机肥高效施肥机的施肥作业状态,其中,所述施肥作业状态包括所述固态有机肥高效施肥机中的固态有机肥余量和消耗量、以及所述固态有机肥高效施肥机的已作业区域和待作业区域;
18、判断模块:用于根据所述施肥作业状态,判断所述固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业;
19、请求模块:用于若判定所述固态有机肥高效施肥机中的固态有机肥含量不能够完成待作业区域的施肥作业,则根据所述施肥作业状态生成并发出固态有机肥补充请求,所述固态有机肥补充请求包括需要补充的固态有机肥的量。
20、本发明实施例提供的固态有机肥高效施肥机具有以下有益效果:该固态有机肥高效施肥方法通过获取固态有机肥高效施肥机固态有机肥余量和消耗量、以及固态有机肥高效施肥机的已作业区域和待作业区域等施肥作业状态,判断固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业;若判定固态有机肥高效施肥机中的固态有机肥含量不能够完成待作业区域的施肥作业,则根据施肥作业状态生成并发出固态有机肥补充请求,固态有机肥补充请求包括需要补充的固态有机肥的量;固态有机肥补充飞行器根据固态有机肥补充请求,向固态有机肥高效施肥机补充固态有机肥,从而使固态有机肥施肥更加高效,有利于实现固态有机肥施肥的智能化。
21、第三方面,本发明实施例提供一种固态有机肥高效施肥装置,包括固态有机肥高效施肥机和固态有机肥补充飞行器,所述固态有机肥高效施肥机用于向作业区域施固态有机肥,所述固态有机肥补充飞行器用于向所述施肥机模块补充固态有机肥。
22、进一步地,在可选的实施例中,所述固态有机肥高效施肥机包括飞行器停放平台和固态有机肥储料仓,所述固态有机肥储料仓与所述飞行器停放平台相邻,所述固态有机肥补充飞行器包括固态有机肥补充仓和补充仓控制门,所述补充仓控制门用于打开或关闭所述固态有机肥补充仓,以使所述固态有机肥补充仓与所述固态有机肥储料仓对接,从而使所述固态有机肥补充仓内的固态有机肥输送至所述固态有机肥储料仓。
23、进一步地,在可选的实施例中,所述飞行器停放平台设有第一对接结构,所述固态有机肥补充飞行器设有第二对接结构,所述第一对接结构与所述第二对接结构对接,以使所述固态有机肥补充仓与所述固态有机肥储料仓相对。
24、本发明实施例提供的固态有机肥高效施肥装置具有以下有益效果:该固态有机肥高效施肥方法通过获取固态有机肥高效施肥机固态有机肥余量和消耗量、以及固态有机肥高效施肥机的已作业区域和待作业区域等施肥作业状态,判断固态有机肥高效施肥机中的固态有机肥含量是否能够完成待作业区域的施肥作业;若判定固态有机肥高效施肥机中的固态有机肥含量不能够完成待作业区域的施肥作业,则根据施肥作业状态生成并发出固态有机肥补充请求,固态有机肥补充请求包括需要补充的固态有机肥的量;固态有机肥补充飞行器根据固态有机肥补充请求,向固态有机肥高效施肥机补充固态有机肥,从而使固态有机肥施肥更加高效,有利于实现固态有机肥施肥的智能化。
- 还没有人留言评论。精彩留言会获得点赞!