自动割草机的制作方法
本发明涉及一种割草机,尤其是一种自动割草机。
背景技术:
1、自动割草机因其能够自主的在工作区域内移动并执行割草工作,能够将用户从枯燥的割草工作中解脱出来,减轻了人力劳动,受到消费者的广泛欢迎。自动割草机自主的在工作区域内移动和割草,不仅需要具备识别工作区域的能力,还需要具备识别障碍的能力。如何使自动割草机准确的识别障碍,并且使自动割草机在识别到障碍后采取合理的避障措施,是自动割草机更加智能化必须要解决的技术问题。为了实现将割草机控制在工作区域内,目前自动割草机主要通过相应工作区域的边缘地带设置能够发射电信号的边界电线来限制自动割草机的移动,并通过碰撞传感器来实现障碍检测,如何使自动割草机在不碰撞障碍的情况下在工作区域内自主地移动和识别障碍并做出反应,尤其有利于用户的安全,因此得到消费者的重点关注。
技术实现思路
1、为克服现有技术的缺陷,本公开实施例所要解决的问题是提供一种非接触避障的自动割草机,以提高割草机的的安全性和适用范围。
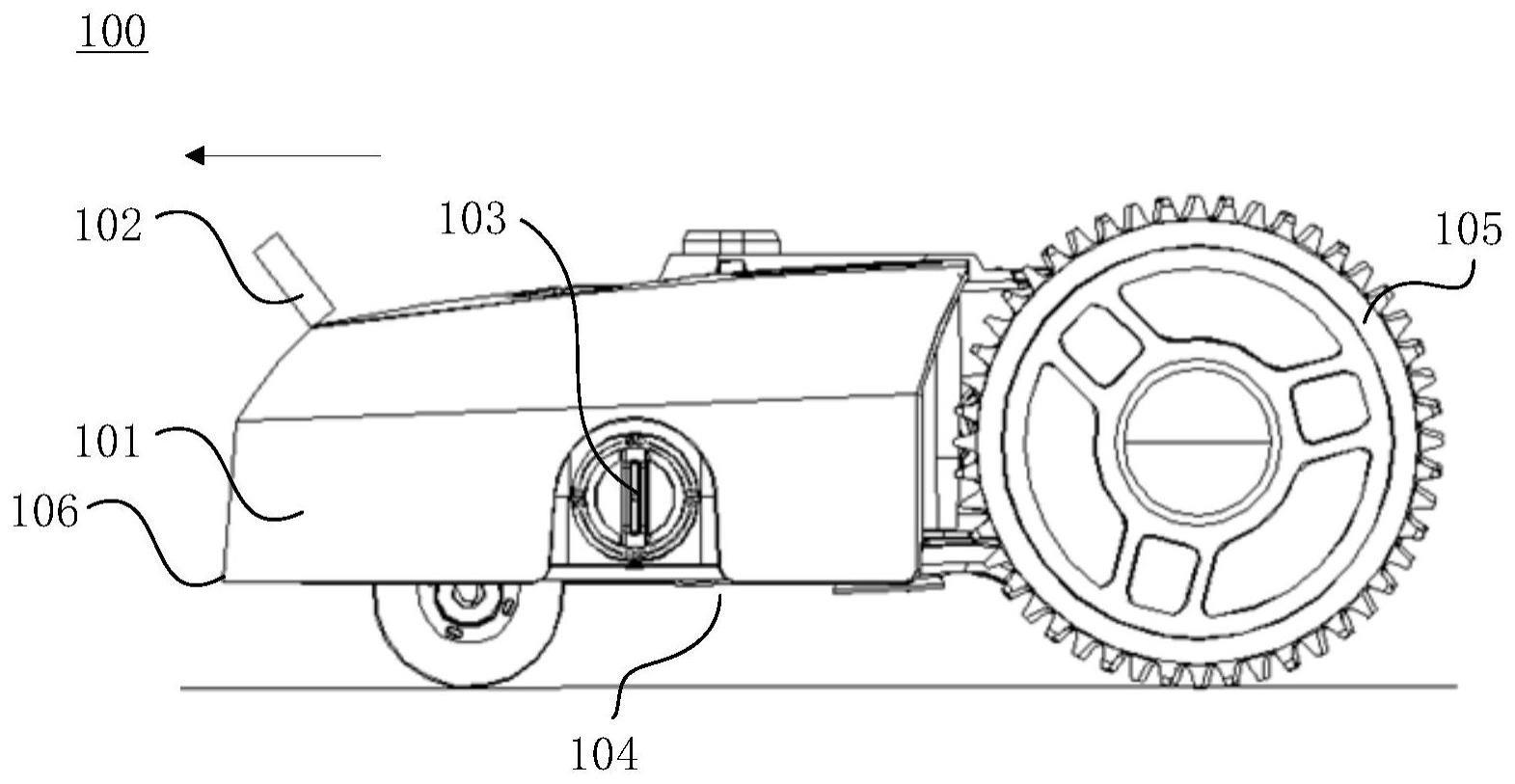
2、一种自动割草机,所述自动割草机能够在预设的工作区域内自主地移动以及执行割草工作,包括:机身,其沿所述自动割草机的前进方向具有相对的机身前端和机身后端;移动模块,带动所述自动割草机移动;割草组件,对工作区域内的草进行切割;图像采集装置,设置于所述机身前端顶部,获取所述机身前进方向上的图像;其中,所述图像采集装置的视场角投射在预设高度的水平面上所覆盖的区域为所述图像采集装置的视野区域,所述视野区域沿所述自动割草机的前进方向包括远离所述机身前端的第一视野边界和靠近所述机身前端的第二视野边界;其中,所述图像采集装置被配置为按照预设的安装参数进行安装,使得所述第一视野边界距所述机身前端第一距离,所述第二视野边界距所述机身前端第二距离;其中,所述第一距离大于或等于所述自动割草机的响应距离,所述响应距离为所述自动割草机为躲避目标物所需的距离,所述目标物包括边界和障碍物;且,所述第二距离小于或等于500mm。
3、通过对图像采集装置的自定义安装,使得第一距离大于或等于自动割草机的响应距离,从而实现自动割草机在工作区域内能够完成避障和不出边界,提升了自动割草机的安全性。
4、在其中一种实施方式中,所述响应距离包括刹车距离、图像识别距离中的至少一种;其中,所述刹车距离为所述自动割草机以制动方式躲避目标物的行驶距离;所述图像采集装置具有图像识别时间,所述图像识别距离为在所述图像识别时间内所述自动割草机的行驶距离。
5、在其中一种实施方式中,所述第一距离大于或等于所述自动割草机的刹车距离与所述图像识别距离之和,其中,其中所述刹车距离至少与以下一种运动参数有关:刹车时间、自动割草机的行驶速度;所述图像识别距离与图像采集装置的图像识别时间、自动割草机的行驶速度有关。
6、在其中一种实施方式中,所述行驶速度的取值范围为0.25m/s-0.5m/s,所述刹车时间的取值范围为50ms-2s,所述刹车距离的取值范围为12.5mm-1000mm;所述图像识别时间的取值范围为50ms-500ms,所述图像识别距离为125mm-250mm。
7、在其中一种实施方式中,所述图像识别时间小于或等于0.6s。
8、在其中一种实施方式中,所述刹车距离为25mm。
9、在其中一种实时方式中,所述图像识别距离为300mm。
10、在其中一种实施方式中,所述第一距离和所述第二距离分别基于所述图像采集装置的安装参数、图像采集装置的内部参数以及所述预设高度h3确定;其中,所述安装参数至少包括安装高度h1、安装距离x0和安装角度,其中,所述安装高度h1为所述图像采集装置距离水平地面的高度;所述安装距离x0为所述图像采集装置距离所述机身前端的水平距离;所述安装角度包括镜头旋转角度a3,所述镜头旋转角度a3为图像采集装置的镜头中轴线与竖直方向所呈的夹角;所述图像采集装置的内部参数包括垂直视场角a2。
11、在其中一种实施方式中,所述第二距离小于或等于预定的盲区阈值。
12、在其中一种实施方式中,所述预设高度h3的取值范围为:0mm≤h3≤150mm;所述安装高度h1的取值范围为:150mm≤h1≤500mm。
13、在其中一种实施方式中所述图像采集装置的垂直视场角a2的取值范围为45°≤a2≤90°。
14、在其中一种实施方式中,所述图像采集装置的镜头旋转角度a3的取值范围为:0≤a3≤75°。
15、在其中一种实施方式中,所述安装距离x0的取值范围为0≤x0≤220mm。
16、在其中一种实施方式中,所述水平安装角度a1的取值范围为0°≤a1≤180°。
17、在其中一种实施方式中,所述响应距离的取值范围为135mm~1250mm。
18、在其中一种实施方式中,所述安装角度还包括水平安装角度a1,所述水平安装角度a1为图像采集装置的镜头中轴线的垂线与水平线之间的夹角;所述安装高度h1的取值范围为218mm≤h1≤434mm;所述安装距离x0的取值范围为0≤x0≤83mm;所述水平安装角度a1的取值范围为0°≤a1≤86°;所述垂直视场角a2的取值范围为45°≤a2≤90°;所述镜头旋转角度a3的取值范围为52°≤a3≤68°。
19、在其中一种实施方式中,所述安装高度h1=220mm;所述安装距离x0=17mm;所述水平安装角度a1=38°;所述镜头旋转角度a3=53°;所述垂直视场角a2=73°。
20、在其中一种实施方式中,所述第一距离大于或等于为800mm。
21、在其中一种实施方式中,所述盲区阈值的取值范围为50mm~500mm。
22、在其中一种实施方式中,所述安装角度还包括水平安装角度a1,所述水平安装角度a1为图像采集装置的镜头中轴线的垂线与水平线之间的夹角;所述安装高度h1的取值范围200mm≤h1≤400mm;所述安装距离x0的取值范围为0≤x0≤40mm;所述水平安装角度a1的取值范围为30°≤a1≤45°;所述垂直视场角a2的取值范围为60°≤a2≤80°;所述镜头旋转角度a3的取值范围为30°≤a3≤45°。
23、在其中一种实施方式中,所述安装高度h1=220mm;所述安装距离x0=17mm;所述水平安装角度a1=38°;所述镜头旋转角度a3=38°;所述垂直视场角a2=73°。
24、在其中一种实施方式中,所述第一距离为805mm。
25、在其中一种实施方式中,所述第二距离小于或等于0,其中,所述机身具有在预设高度的水平面上的投影,所述第二距离小于零包括第二视野边界在所述投影范围内。
26、在其中一种实施方式中,所述盲区阈值为150mm。
27、在其中一种实施方式中,所述图像采集装置的内部参数还包括水平视场角a4,所述图像采集装置的水平视场角a4的取值范围为60°≤a4≤160°。
28、在其中一种实施方式中,水平视场角a4与垂直视场角a2的比值为4:3或者16:9。
29、在其中一种实施方式中,水平视场角a4=130°,垂直视场角a2=73°。
30、在其中一种实施方式中,所述视野区域沿垂直于机身前进方向包括位于前进方向左侧的第三视野边界和位于前进方向右侧的第四视野边界;其中,第三视野边界与第四视野边界之间的距离为所述自动割草机机身宽度的1.2至3倍。
31、在其中一种实施方式中,所述机身宽度的取值范围为400mm-550mm。
32、在其中一种实施方式中,所述第三视野边界与所述第四视野边界之间的距离基于安装参数、图像采集装置的内部参数以及预设高度h3确定;所述安装参数至少包括安装高度h1;所述图像采集装置的内部参数包括水平视场角a4;其中,所述水平视场角a4配置为确定所述图像采集装置在沿机身宽度方向上的探测距离。
33、在其中一种实施方式中,所述安装高度h1的取值范围为:150mm≤h1≤500mm,所述h3的取值范围为0mm≤h3≤150mm。
34、在其中一种实施方式中,所述图像采集装置的水平视场角a4的取值范围为60°≤a4≤160°。
- 还没有人留言评论。精彩留言会获得点赞!