一种应用于饲料运输的牧场无人撒料车的制作方法
本发明属于牧场饲料运输领域,具体涉及一种应用于饲料运输的牧场无人撒料车。
背景技术:
1、目前,中国的畜牧养殖的规模化、数字化程度低,传统牧场的饲喂方式易造成畜禽营养不均、饲料浪费等问题,且人工劳动强度较大、生产率较低。
2、现有的控制系统虽然能够实现部分工作的自动化,例如自动配料、自动饲喂,但仍需要驾驶员驾驶运输车进行饲料的运输,仍然无法实现整个喂养流程的自动化。
技术实现思路
1、针对现有技术存在的不足,本发明提供了一种应用于饲料运输的牧场无人撒料车,能自动移动到至撒料位置完成撒料流程。
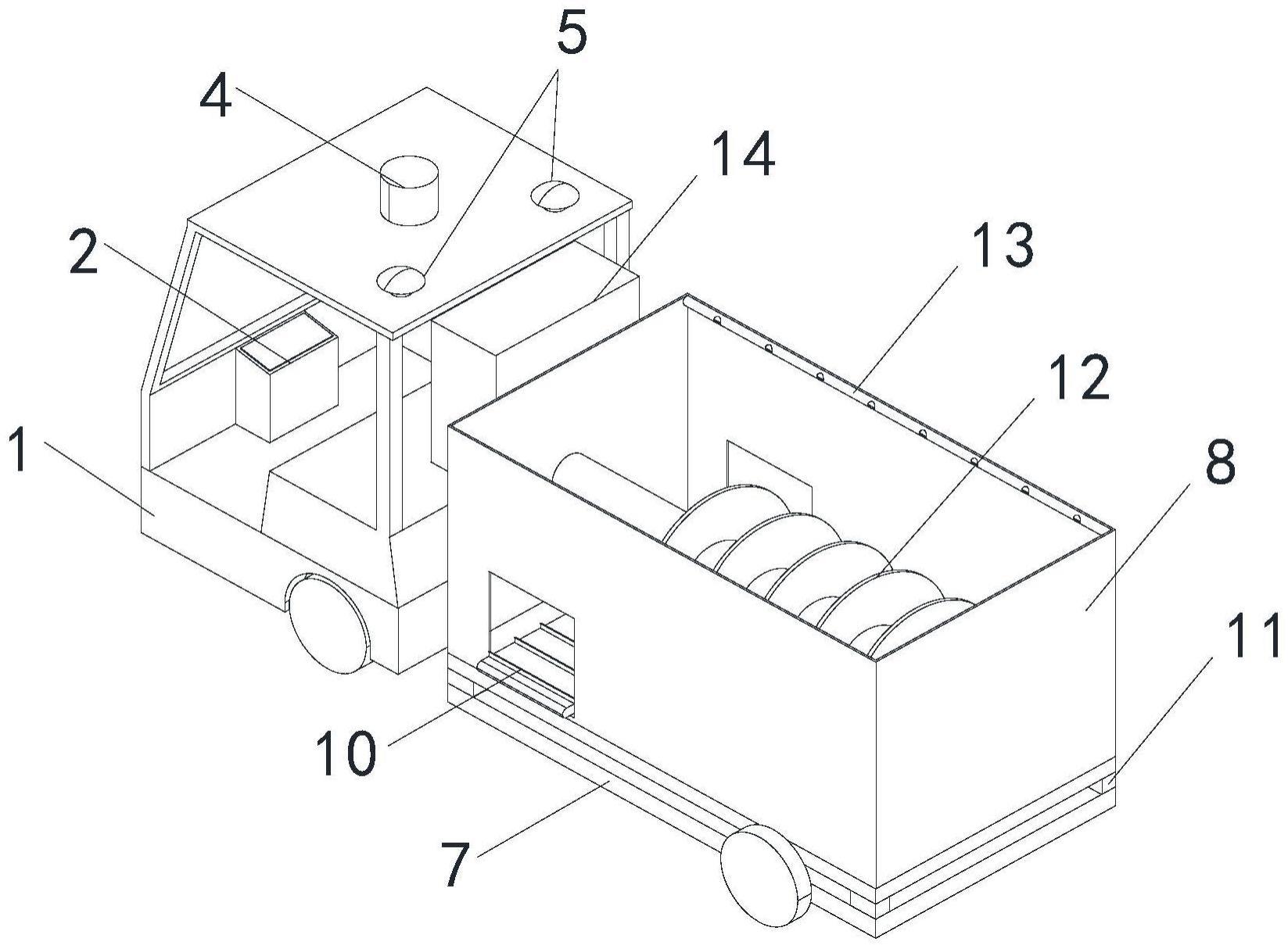
2、为达到上述目的,本发明采用以下技术方案:一种应用于饲料运输的牧场无人撒料车,包括车头、拖挂底板,所述底盘和拖挂底板之间连接有连接件;所述车头上设置有用于控制整车的控制台、定位组件和激光雷达,所述控制台内置有无线模块;所述拖挂底板上安装有料仓,所述拖挂底板与料仓之间设有称重传感器,所述料仓的顶部设置有含水量控制组件,料仓内设置有搅拌组件和送料组件,料仓的侧面设置有出料口。
3、进一步,所述定位组件包括rtk定位模块,rtk定位模块安装于车头的顶面的两边。
4、进一步,所述车头还设置有视觉组件,所述视觉组件包括视觉传感器,所述视觉传感器安装于车头的前部。
5、进一步,所述控制台设有显示器,视觉传感器连接所述显示器。
6、进一步,所述激光雷达安装过于车头的顶部。
7、进一步,所述含水量控制组件包括水箱,所述水箱安装于料仓的侧壁上部,料仓的内壁上部设置有洒水管,洒水管上开设有多个洒水孔。
8、进一步,所述含水量控制组件还包括温度传感器和湿度传感器,温度传感器和湿度传感器均设置于料仓内侧。
9、进一步,所述搅拌组件包括安装于料仓内的搅拌螺杆和螺杆电机。
10、进一步,所述送料组件包括设置于搅拌组件下方的第一传送带和第一电机,所述第一传送带的一端设置有第二传送带和第二电机,所述第二传送带的两端分别位于料仓的两个出料口。
11、进一步,所述第一传送带和第二传送带上均设置有刮板。
12、本发明的有益效果为:控制台收到信号后,无人撒料车按照规划好的路径向目标点行驶,定位组件实时反馈车辆位置,同时料仓调节饲料含水量并搅拌,搅拌时间到达预设值时停止搅拌,在行进路程中,激光雷达监测路径障碍物,防止碰撞事故,到达撒料点后,送料组件将搅拌后的饲料经出料口送出,实现自动饲喂。
技术特征:
1.一种应用于饲料运输的牧场无人撒料车,其特征在于,包括车头(1)、拖挂底板(7),所述底盘(1)和拖挂底板(7)之间连接有连接件(6);
2.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述定位组件包括rtk定位模块(5),rtk定位模块(5)安装于车头(1)的顶面的两边。
3.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述车头(1)还设置有视觉组件,所述视觉组件包括视觉传感器(3),所述视觉传感器(3)安装于车头(1)的前部。
4.根据权利要求3所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述控制台(2)设有显示器,视觉传感器(3)连接所述显示器。
5.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述激光雷达(4)安装过于车头(1)的顶部。
6.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述含水量控制组件包括水箱(14),所述水箱(14)安装于料仓(8)的侧壁上部,料仓(8)的内壁上部设置有洒水管(13),洒水管上开设有多个洒水孔。
7.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述含水量控制组件还包括温度传感器和湿度传感器,温度传感器和湿度传感器均设置于料仓(8)内侧。
8.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述搅拌组件包括安装于料仓(8)内的搅拌螺杆(12)和螺杆电机。
9.根据权利要求1所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述送料组件包括设置于搅拌组件下方的第一传送带(9)和第一电机,所述第一传送带(9)的一端设置有第二传送带(10)和第二电机,所述第二传送带(10)的两端分别位于料仓(8)的两个出料口。
10.根据权利要求9所述的应用于饲料运输的牧场无人撒料车,其特征在于,所述第一传送带(9)和第二传送带(10)上均设置有刮板。
技术总结
本发明提供了一种应用于饲料运输的牧场无人撒料车,包括车头、拖挂底板,所述底盘和拖挂底板之间连接有连接件;所述车头上设置有用于控制整车的控制台、定位组件和激光雷达,所述控制台内置有无线模块;所述拖挂底板上安装有料仓,所述拖挂底板与料仓之间设有称重传感器,所述料仓的顶部设置有含水量控制组件,料仓内设置有搅拌组件和送料组件,料仓的侧面设置有出料口。本发明通过定位组件实时反馈车辆位置,同时料仓调节饲料含水量并搅拌,搅拌时间到达预设值时停止搅拌,在行进路程中,激光雷达监测路径障碍物,防止碰撞事故,到达撒料点后,送料组件将搅拌后的饲料经出料口送出,实现自动饲喂。
技术研发人员:蒯立军,郑希,郭昕,毛宽民,朱孟轩,周意,朱洲,何万丽
受保护的技术使用者:宁夏新大众机械有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!