采摘机器人及采摘系统的制作方法
本发明涉及农用机械,尤其涉及一种采摘机器人及采摘系统。
背景技术:
1、设施农业是果蔬种植的重要组成部分,国内设施大棚数量巨大,目前大棚农活几乎都是人工作业,自动化程度低。尤其设施大棚的地面主道路较少,垄沟较多且较为狭窄,现有的采摘机器人基本是在宽敞、硬化地面的基础上进行采摘作业,因此,现有的农业采摘机器人不能很好的应用在地面空间狭窄、且道路崎岖的设施农业中,无法适应设施农业实际工况。
2、因此,有必要提供一种新的技术方案以解决上述技术问题。
技术实现思路
1、本发明提供一种采摘机器人及采摘系统,用以解决现有技术中农业采摘机器人不能很好的应用在地面空间狭窄、且道路崎岖的设施农业中的缺陷。
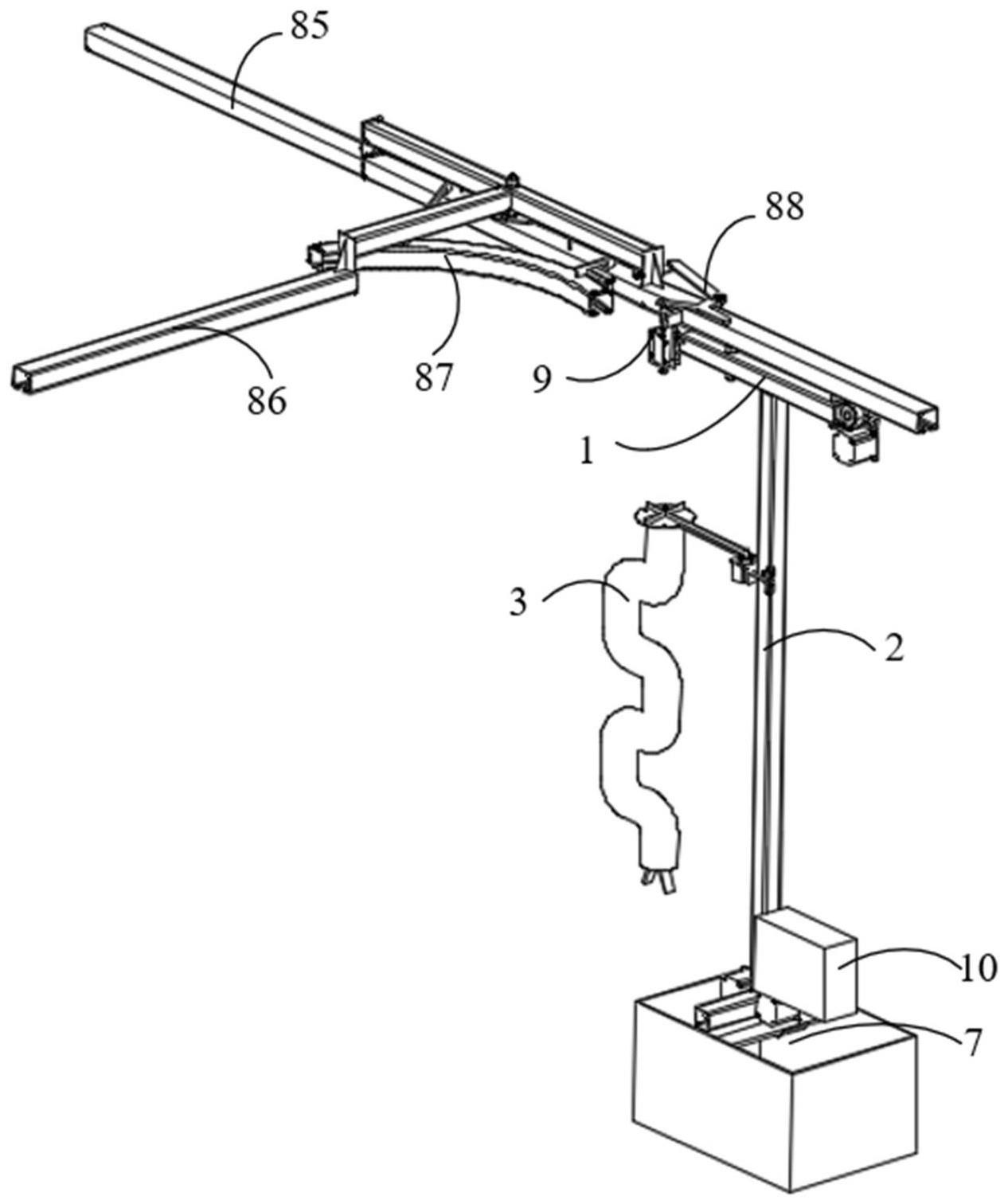
2、第一方面,本发明提供一种采摘机器人,应用于悬挂轨道,所述悬挂轨道设有安装空间以及与所述安装空间连通的导向槽,包括:行走机构、支撑杆以及执行部;
3、所述行走机构包括底座、导向组件以及驱动组件,所述导向组件包括支架、第一安装座和导向轮,所述底座具有相背的第一侧和第二侧,所述第一安装座通过所述支架设于所述第一侧,所述导向轮转动设于所述第一安装座,所述第一安装座用于设于所述安装空间内,所述支架能够穿设于所述导向槽,所述导向轮能够与所述安装空间的顶壁和/或底壁抵接;
4、所述驱动组件包括驱动轮、第一驱动电机以及第二安装座,所述第二安装座设于所述底座的端面,所述驱动轮转动设于所述第二安装座,所述第一驱动电机设于所述底座,且与所述驱动轮传动连接,所述驱动轮用于与所述悬挂轨道的底面抵接,所述支撑杆连接于所述底座的第二侧,所述执行部设于所述支撑杆。
5、根据本发明提供的一种采摘机器人,所述支撑杆设有处于对角线的第一边沿和第二边沿,所述采摘机器人还包括升降组件,所述升降组件包括升降平台以及升降驱动源,所述升降平台包括升降座、第一滚动部和第二滚动部,所述第一滚动部和所述第二滚动部转动设于所述升降座,所述第一滚动部和所述第二滚动部之间形成有容置空间,所述支撑杆位于所述容置空间内,所述第一滚动部对应于所述第一边沿,所述第二滚动部对应于所述第二边沿,所述升降驱动源设于所述支撑杆,所述升降驱动源与所述升降座连接,所述执行部设于所述升降座。
6、根据本发明提供的一种采摘机器人,所述升降驱动源包括定滑轮、第一传动带以及第二驱动电机,所述定滑轮和所述第二驱动电机沿所述支撑杆的高度方向依次设置,所述第一传动带套设于所述第二驱动电机的输出轴和所述定滑轮,所述升降座设于所述第一传动带,在所述第一传动带的带动下,所述执行部能够沿所述支撑杆的高度方向移动。
7、根据本发明提供的一种采摘机器人,所述采摘机器人还包括旋转电机和悬臂架,所述悬臂架通过所述旋转电机设于所述升降座,所述执行部设于所述悬臂架,在所述旋转电机的带动下,所述执行部能够沿与所述支撑杆的高度方向相垂直的方向移动。
8、根据本发明提供的一种采摘机器人,所述采摘机器人还包括果篮更换组件,所述果篮更换组件包括果篮、转接杆、挂钩以及第三驱动电机,所述第三驱动电机设于所述支撑杆,所述转接杆设于所述第三驱动电机的输出轴,所述挂钩包括连接部以及自所述连接部弯折延伸的弯折部,所述连接部与所述转接杆转动连接,所述果篮可分离式连接于所述弯折部。
9、根据本发明提供的一种采摘机器人,每个所述导向组件至少包括两个导向轮,两个所述导向轮对称设于所述第一安装座的相对两侧。
10、根据本发明提供的一种采摘机器人,所述驱动轮通过转动轴设于所述第二安装座,所述驱动组件还包括第二传动带,所述第二传送带套设于所述转动轴和所述第一驱动电机的输出轴。
11、根据本发明提供的一种采摘机器人,所述驱动轮至少为两个,所述悬挂轨道的底面具有关于所述导向槽对称设置的第一底面和第二底面,所述第一底面对应设有至少一个所述驱动轮,所述第二底面对应设有至少一个所述驱动轮。
12、第二方面,本发明还提供一种采摘系统,包括:悬挂轨道和上述的采摘机器人;
13、所述第一安装座设于所述安装空间内,所述支架穿设于所述导向槽,所述导向轮与所述安装空间的顶壁和/或底壁抵接;所述驱动轮与所述悬挂轨道的底面抵接。
14、根据本发明提供的一种采摘系统,所述悬挂轨道包括主轨道、支线轨道、变轨轨道以及转动连接组件;
15、所述主轨道在其与所述支线轨道的交汇处断开呈分段式设置,所述转动连接组件设置在所述主轨道上且位于靠近所述交汇处的位置,所述变轨轨道设置在所述交汇处并通过所述转动连接组件与所述主轨道转动连接;
16、所述采摘机器人还包括换向开关,所述换向开关设于所述底座的侧面,在所述采摘机器人相对所述悬挂轨道移动的情形下,所述换向开关能够带动所述转动连接组件,所述变轨轨道随所述转动连接组件的转动进行同步转动,以将所述主轨道导通或者将所述主轨道与所述支线轨道导通。
17、本发明提供的一种采摘机器人及采摘系统,第一驱动电机带动驱动轮相对于悬挂轨道的底面转动,从而实现采摘机器人的移动,此时导向轮也随着驱动轮的移动,在安装空间内发生转动,从而减小采摘机器人移动过程中的摩擦力,在采摘机器人移动至目的地后由执行部进行采摘作业。采摘机器人可以用于悬挂轨道,可以适用于狭窄、崎岖等不同的路面条件。
技术特征:
1.一种采摘机器人,应用于悬挂轨道,所述悬挂轨道设有安装空间以及与所述安装空间连通的导向槽,其特征在于,包括:行走机构、支撑杆以及执行部;
2.根据权利要求1所述的采摘机器人,其特征在于,所述支撑杆设有处于对角线的第一边沿和第二边沿,所述采摘机器人还包括升降组件,所述升降组件包括升降平台以及升降驱动源,所述升降平台包括升降座、第一滚动部和第二滚动部,所述第一滚动部和所述第二滚动部转动设于所述升降座,所述第一滚动部和所述第二滚动部之间形成有容置空间,所述支撑杆位于所述容置空间内,所述第一滚动部对应于所述第一边沿,所述第二滚动部对应于所述第二边沿,所述升降驱动源设于所述支撑杆,所述升降驱动源与所述升降座连接,所述执行部设于所述升降座。
3.根据权利要求2所述的采摘机器人,其特征在于,所述升降驱动源包括定滑轮、第一传动带以及第二驱动电机,所述定滑轮和所述第二驱动电机沿所述支撑杆的高度方向依次设置,所述第一传动带套设于所述第二驱动电机的输出轴和所述定滑轮,所述升降座设于所述第一传动带,在所述第一传动带的带动下,所述执行部能够沿所述支撑杆的高度方向移动。
4.根据权利要求2所述的采摘机器人,其特征在于,所述采摘机器人还包括旋转电机和悬臂架,所述悬臂架通过所述旋转电机设于所述升降座,所述执行部设于所述悬臂架,在所述旋转电机的带动下,所述执行部能够沿与所述支撑杆的高度方向相垂直的方向移动。
5.根据权利要求1所述的采摘机器人,其特征在于,所述采摘机器人还包括果篮更换组件,所述果篮更换组件包括果篮、转接杆、挂钩以及第三驱动电机,所述第三驱动电机设于所述支撑杆,所述转接杆设于所述第三驱动电机的输出轴,所述挂钩包括连接部以及自所述连接部弯折延伸的弯折部,所述连接部与所述转接杆转动连接,所述果篮可分离式连接于所述弯折部。
6.根据权利要求1所述的采摘机器人,其特征在于,每个所述导向组件至少包括两个导向轮,两个所述导向轮对称设于所述第一安装座的相对两侧。
7.根据权利要求1所述的采摘机器人,其特征在于,所述驱动轮通过转动轴设于所述第二安装座,所述驱动组件还包括第二传动带,所述第二传送带套设于所述转动轴和所述第一驱动电机的输出轴。
8.根据权利要求1所述的采摘机器人,其特征在于,所述驱动轮至少为两个,所述悬挂轨道的底面具有关于所述导向槽对称设置的第一底面和第二底面,所述第一底面对应设有至少一个所述驱动轮,所述第二底面对应设有至少一个所述驱动轮。
9.一种采摘系统,其特征在于,包括:悬挂轨道和根据权利要求1至8任一项所述的采摘机器人;
10.根据权利要求9所述的采摘系统,其特征在于,所述悬挂轨道包括主轨道、支线轨道、变轨轨道以及转动连接组件;
技术总结
本发明涉及农用机械技术领域,提供一种采摘机器人及采摘系统,该采摘机器人包括行走机构、支撑杆和执行部;行走机构包括底座、导向组件和驱动组件,导向组件包括支架、第一安装座和导向轮,底座具有相背的第一侧和第二侧,第一安装座通过支架设于第一侧,导向轮设于第一安装座,第一安装座设于安装空间内,支架穿设于导向槽,导向轮与安装空间的顶壁和/或底壁抵接;驱动组件包括驱动轮、第一驱动电机和第二安装座,第二安装座设于底座的端面,驱动轮转动设于第二安装座,第一驱动电机设于底座,与驱动轮传动连接,驱动轮与悬挂轨道的底面抵接,支撑杆连接于底座的第二侧,执行部设于支撑杆。采摘机器人适用于狭窄、崎岖等工作场景。
技术研发人员:李志强,李求孟,许浩然,许峰
受保护的技术使用者:北京易同云网科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!