一种植保无人机的施药控制方法、系统及介质
本发明涉及农业施药,特别涉及一种植保无人机的施药控制方法、系统及介质。
背景技术:
1、目前,农业生产中普遍存在着虫害对农作物的危害问题,因此植保施药是保障农作物健康生长的重要手段之一。传统的施药方式主要依靠人工操作或机械设备,但这些方法存在着效率低、施药不均匀、过量用药和环境污染等问题,且缺乏精准施药的能力。植保无人机作为一种新兴的农业施药工具,具有灵活、高效、快速等优势,能够实现精准施药,降低农药的使用量,减少环境污染,提高农作物产量和质量。然而,目前大部分植保无人机的施药方式仍然采用传统的定时定量施药,未能根据具体农田的实际情况进行个性化施药。缺乏针对虫害信息的监测与分析,导致施药效果不佳。因此,急需一种能够综合农田信息、监测虫害、智能判断最佳施药时间,并进行施药效果评估的植保无人机施药控制方法。该方法应当基于先进的图像识别技术和数据分析方法,能够实现农作物施药的个性化,提高施药效率和精确度,达到科学、环保、可持续的农业生产目标。
技术实现思路
1、为了解决上述至少一个技术问题,本发明提出了一种植保无人机的施药控制方法、系统及介质。
2、本发明第一方面提供了一种植保无人机的施药控制方法,包括:
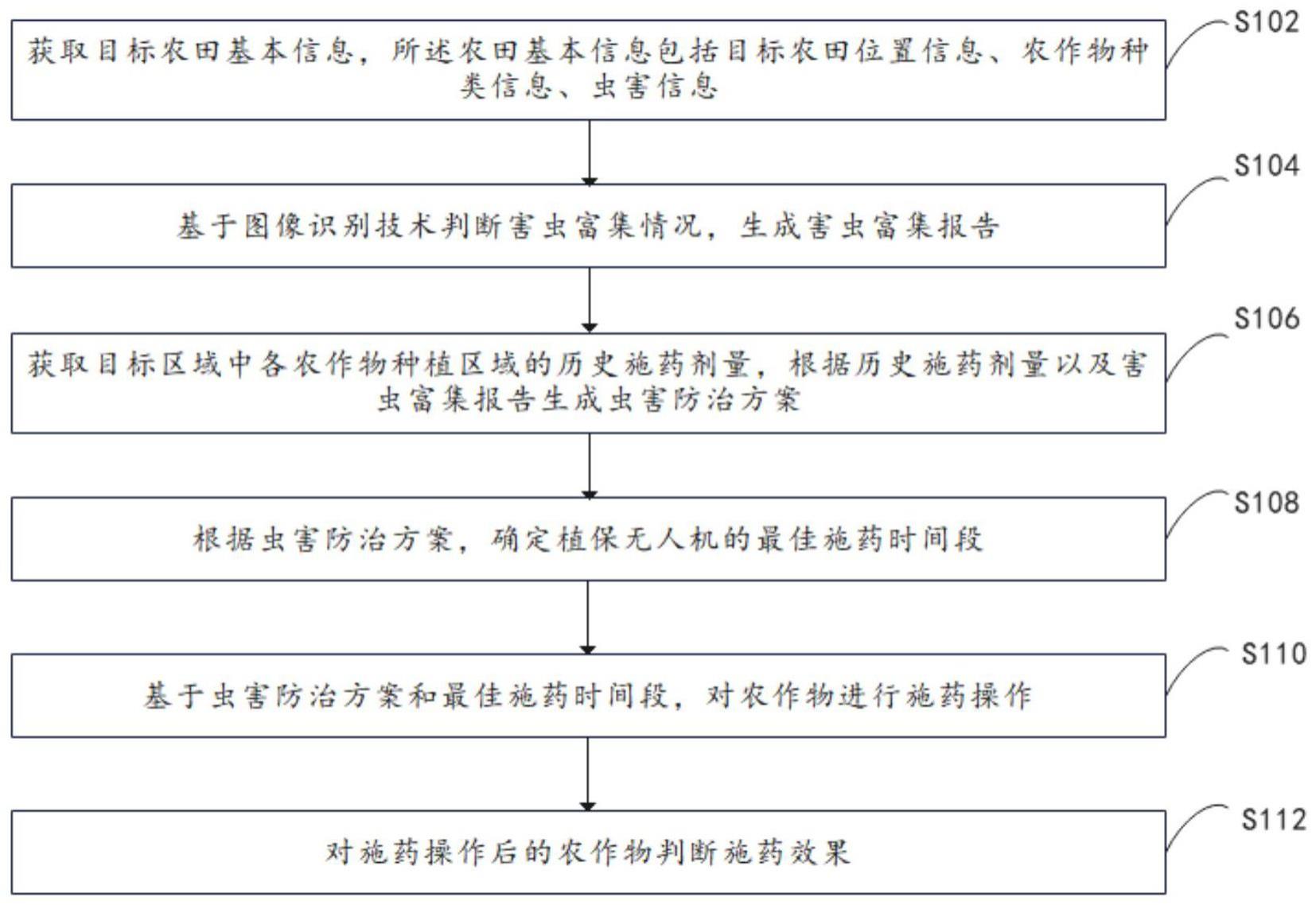
3、获取目标农田基本信息,所述农田基本信息包括目标农田位置信息、农作物种类信息、虫害信息;
4、基于图像识别技术判断害虫富集情况,生成害虫富集报告;
5、获取目标区域中各农作物种植区域的历史施药剂量,根据历史施药剂量以及害虫富集报告生成虫害防治方案;
6、根据虫害防治方案,确定植保无人机的最佳施药时间段;
7、基于虫害防治方案和最佳施药时间段,对农作物进行施药操作;
8、对施药操作后的农作物判断施药效果。
9、本方案中,所述获取目标农田基本信息,所述农田基本信息包括目标农田位置信息、农作物种类信息、虫害信息,具体为:
10、基于gps定位设备,获取目标农田位置信息,所述位置信息包括经、纬度数据,构建地图模型,将所述目标农田位置信息导入地图模型中,生成目标农田地图模型,并在预设显示器中进行显示;
11、根据农田种植信息,获取农作物种类信息,所述农作物种类信息包括农作物名称、生长高度;
12、根据农田调查数据,获取农田中的虫害信息,所述虫害信息包括害虫名称、害虫特征。
13、本方案中,所述基于图像识别技术判断害虫富集情况,生成害虫富集报告,具体为:
14、获取预设区域内对害虫进行富集操作过程中的视频数据,提取所述视频数据的视频帧图像,得到视频帧图像集;
15、提取所述视频帧图像集的每一帧图像的像素信息;
16、根据所述像素信息计算视频帧图像集的像素协方差矩阵,根据所述像素协方差矩阵计算视频帧图像集的特征向量和特征值;
17、将特征值由大到小进行排序,并选择第一个特征值作为特征向量的主成分,将原始的像素信息投影到所述主成分上,得到一次降维的视频帧图像集数据;
18、计算一次降维的视频帧图像集数据的相似度矩阵,利用相似度矩阵计算数据点与数据点之间的条件概率,得到概率分布图;
19、初始化二次降维的数据点位置,根据概率分布图,计算二次降维后的数据点之间的条件概率;
20、根据概率分布图和二次降维的数据点之间的条件概率计算kl散度值,循环对二次降维的数据点位置进行调整,直到kl散度值达到预设散度值,得到二次降维视频帧图像集;
21、基于图像识别技术构建图像处理模型;
22、将所述二次降维视频帧图像集的每一帧视频帧图像导入图像处理模型中,对每个害虫的位置进行以圆点进行标记,得到标记图像;
23、根据标记图像,判断害虫的富集程度,生成害虫富集报告,所述害虫富集报告包括害虫在目标农田中的数量。
24、本方案中,所述获取目标区域中各农作物种植区域的历史施药剂量,根据历史施药剂量以及害虫富集报告生成虫害防治方案,具体为:
25、获取目标区域中各农作物种植区域的历史施药剂量,判断历史施药剂量是否达到污染标准,若未达到污染标准,则生成植保无人机施药防治方案;
26、若达到污染标准,则获取目标农田中的害虫的天敌昆虫的趋光性信息,并设定天敌昆虫的数量阈值;
27、在预设时间段内,初始化预设数量的天敌昆虫光照诱导设备,对天敌昆虫进行诱导至目标农田中;
28、通过红外检测装置实时观测害虫的天敌昆虫的数量变化信息,并实时将所述数量变化信息绘制成数量-时间变化图;
29、若对天敌昆虫进行诱导后,目标农田中的天敌昆虫数量不大于数量阈值,根据所述预设数量的天敌昆虫光照诱导设备,设置天敌昆虫诱导网络;
30、若对天敌昆虫进行诱导后,目标农田中的天敌昆虫数量大于数量阈值,均匀减少天敌昆虫光照诱导设备,并对天敌昆虫进行引流,直至诱导后的目标农田中的天敌昆虫数量不大于数量阈值。
31、本方案中,所述根据虫害防治方案,确定植保无人机的最佳施药时间段,具体为:
32、获取所述视频帧图像的时间戳信息;
33、根据害虫富集报告和视频帧图像的时间戳信息,绘制基于时间变化的害虫数量变化的数量-时间曲线;
34、根据数量-时间曲线的变化信息,确定害虫富集数量最多的时间段;
35、根据所述时间段,确定植保无人机的最佳施药时间段。
36、本方案中,所述基于害虫富集报告和最佳施药时间段,对农作物进行施药操作,具体为:
37、将目标农田以网格的方式划分为n个小区域,并将划分的小区域在所述目标农田地图模型中进行显示;
38、在最佳施药时间段内,基于植保无人机的摄像装置获取每个小区域的图像信息;
39、根据所述图像信息对图像进行特征提取,将提取的特征与害虫特征进行对比,得到图片中的害虫,并对所述害虫进行统计,得到每个小区域的害虫数量信息;
40、若害虫数量大于预设数量,将该小区域标记为待施药区域,并获取待施药区域的位置信息,并在目标农田地图模型中进行标记;
41、基于待施药区域的位置信息,设置植保无人机施药路线的起点与终点;
42、基于dijkstra算法对待施药区域的位置信息进行搜索,得到植保无人机施药的最短路径,形成施药路线;
43、根据害虫的数量信息、待施药区域的位置信息、农作物种类信息,实时调控植保无人机在不同位置的施药量。
44、本方案中,所述对施药操作后的农作物判断施药效果,具体为:
45、选择预设百分比的施药操作后区域的预设时间内的施药后视频数据,并提取施药后视频帧数据;
46、对施药后视频帧数据进行光流向量计算,得到光流场;
47、对光流场进行运动过滤,得到害虫运动的光流信息;
48、基于光流信息,对光流场进行阈值化处理,将相连的像素点组成害虫运动轨迹;
49、对害虫运动轨迹进行计数,得到施药后害虫数量;
50、将施药后害虫数量与害虫富集数量进行对比,判断施药效果。
51、本发明第二方面还提供了一种植保无人机的施药控制系统,该系统包括:存储器、处理器,所述存储器中包括植保无人机的施药控制方法程序,所述植保无人机的施药控制方法程序被所述处理器执行时,实现如下步骤:
52、获取目标农田基本信息,所述农田基本信息包括目标农田位置信息、农作物种类信息、虫害信息;
53、基于图像识别技术判断害虫富集情况,生成害虫富集报告;
54、获取目标区域中各农作物种植区域的历史施药剂量,根据历史施药剂量以及害虫富集报告生成虫害防治方案;
55、根据虫害防治方案,确定植保无人机的最佳施药时间段;
56、基于虫害防治方案和最佳施药时间段,对农作物进行施药操作;
57、对施药操作后的农作物判断施药效果。
58、本方案中,所述获取目标区域中各农作物种植区域的历史施药剂量,根据历史施药剂量以及害虫富集报告生成虫害防治方案,具体为:
59、获取目标区域中各农作物种植区域的历史施药剂量,判断历史施药剂量是否达到污染标准,若未达到污染标准,则生成植保无人机施药防治方案;
60、若达到污染标准,则获取目标农田中的害虫的天敌昆虫的趋光性信息,并设定天敌昆虫的数量阈值;
61、在预设时间段内,初始化预设数量的天敌昆虫光照诱导设备,对天敌昆虫进行诱导至目标农田中;
62、通过红外检测装置实时观测害虫的天敌昆虫的数量变化信息,并实时将所述数量变化信息绘制成数量-时间变化图;
63、若对天敌昆虫进行诱导后,目标农田中的天敌昆虫数量不大于数量阈值,根据所述预设数量的天敌昆虫光照诱导设备,设置天敌昆虫诱导网络;
64、若对天敌昆虫进行诱导后,目标农田中的天敌昆虫数量大于数量阈值,均匀减少天敌昆虫光照诱导设备,并对天敌昆虫进行引流,直至诱导后的目标农田中的天敌昆虫数量不大于数量阈值。
65、本发明第三方面还提供一种计算机可读存储介质,所述计算机可读存储介质包括植保无人机的施药控制方法程序,所述植保无人机的施药控制方法程序被处理器执行时,实现如上述任一项所述的植保无人机的施药控制方法的步骤。
66、本发明公开了一种植保无人机的施药控制方法、系统及介质,旨在提供一种高效精准的农作物施药方案。该方法包括以下步骤:首先,获取目标农田的基本信息。其次,利用图像识别技术判断害虫的富集情况,生成害虫富集报告。然后,根据历史施药剂量以及害虫富集报告生成虫害防治方案。根据虫害防治方案,确定植保无人机的最佳施药时间段。接着,在最佳施药时间段内,对农作物进行施药操作。最后,对施药操作后的农作物进行效果判断,以评估施药效果。本发明实现了农田信息获取、虫害监测、施药时间确定和施药效果评估的一体化,提高了植保无人机施药的效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!