一种泵动喷剂式自动除草无人车
本发明涉及除草设备,特别涉及一种泵动喷剂式自动除草无人车。
背景技术:
1、如今不管是在农业领域,还是在园艺领域,或是在开垦荒地时,均需要在播种之前将土地上的杂草除去,而目前的除草工作依旧是较为繁琐的一个流程。传统的除草方法包括人工除草、化学喷洒和机械割草。人工除草和机械割草均需要人工参与且效率低下,而目前的化学喷洒方式喷洒面积较大,容易将除草剂喷洒至没有杂草的土壤上,环保性低下且容易造成资源浪费。因此,很有必要发明一种能够替代人工进行自动除草的无人车。
2、近些年来,随着计算机视觉、深度学习和机器人技术的不断进步,自动化识别与处理技术已经取得了显著的发展。如果将基于深度学习的图像分类识别算法应用于自动除草无人车,自动除草无人车就能够识别杂草,并准确地向杂草所在区域根据杂草数量喷洒对应量的除草剂,以提高除草的效率,并减少除草剂的浪费和土壤污染。
技术实现思路
1、针对上述问题,本发明提出一种泵动喷剂式自动除草无人车,所使用的技术方案是:
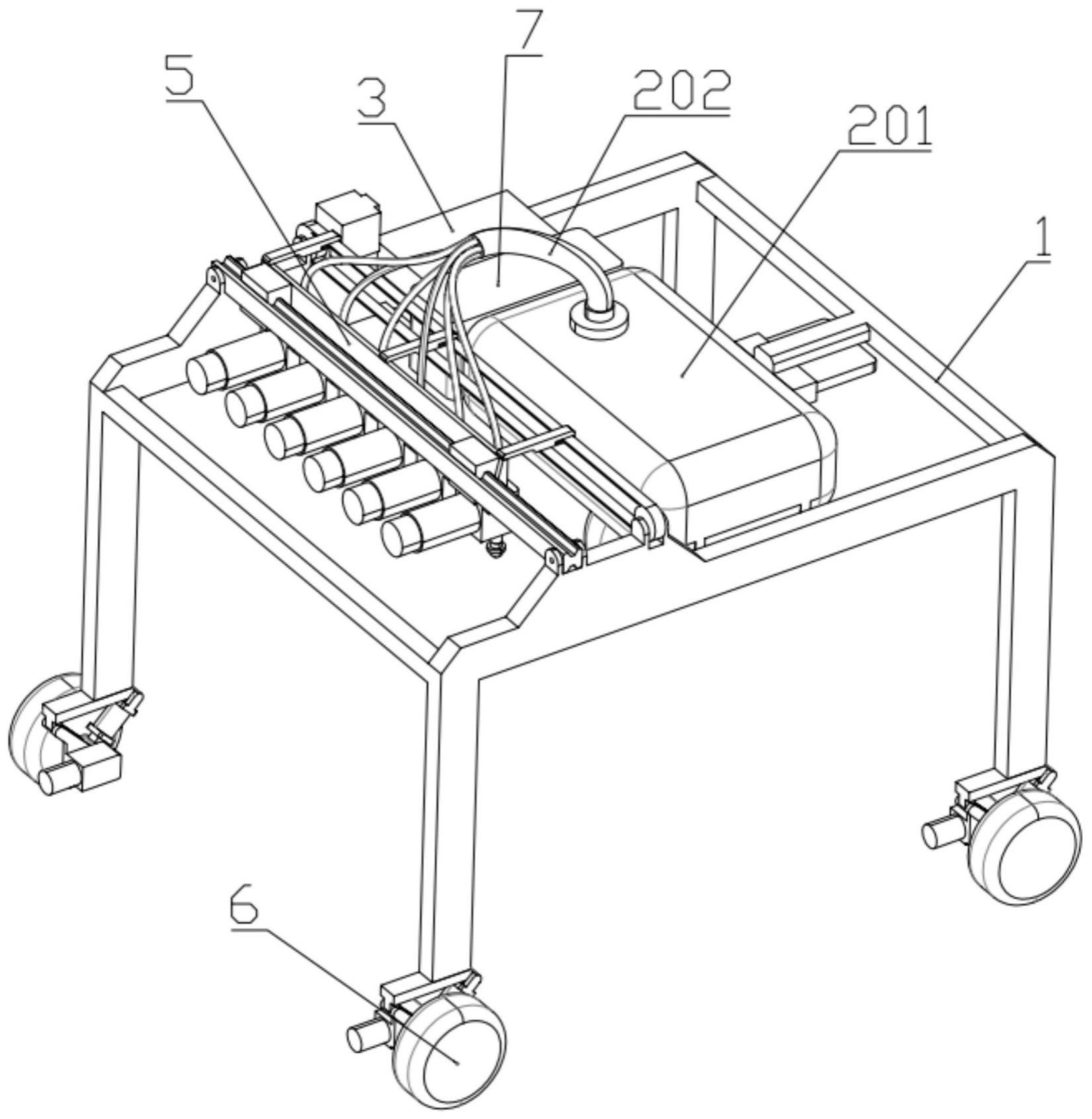
2、一种泵动喷剂式自动除草无人车,包括车体、喷药装置、控制装置、识别装置、滑动装置、驱动装置和电池组;所述车体上平行设有至少两对支腿,每条支腿底端均安装有一组驱动装置,所述驱动装置用于带动车体移动;所述喷药装置包括药剂箱、输液管、喷剂泵、喷剂泵电机和高压喷嘴,所述药剂箱固定安装在车体上;所述喷剂泵设有若干,每个喷剂泵均由一个喷剂泵电机控制并安装有一个高压喷嘴;所有喷剂泵均通过输液管与药剂箱连通,且均安装在滑动装置上,并由滑动装置带动在车体上滑动;所述药剂箱上固定安装有液位传感器,用于实时测量药剂箱内剩余药剂的液位;所述控制装置包括控制端和控制手柄,所述控制端固定安装在车体上并与控制手柄、识别装置无线通信连接,所述控制端还与液位传感器、喷剂泵电机、滑动装置、驱动装置、电池组电性连接;所述识别装置以可拆卸的方式安装在车体上;所述电池组固定安装在车体上,用于为整个自动除草无人车提供电力;识别装置采集土地图像数据并进行分析处理,然后将处理好的信息传递给控制端,控制端根据传递来的信息来控制喷剂泵电机、滑动装置和驱动装置。
3、进一步地,所述滑动装置包括步进电机、传动带、传动轮、滑轨和滑动架;所述喷剂泵固定安装在滑动架上;所述滑轨固定安装在车体上,且滑轨上滑动安装有至少一个滑块,所述滑动架与滑块固定连接;所述传动轮设有两个且均转动安装在车体上,并通过传动带同步套设连接;所述滑动架与传动带固定连接;所述步进电机固定安装在车体上,其输出端与其中一个传动轮同轴固定连接,且所述步进电机与电池组电性连接。
4、进一步地,每个所述驱动装置均包括驱动轮、直流减速电机和减震结构;所述减震结构固定安装在车体的支腿上;所述驱动轮至少设有一个,均转动安装在所述减震结构上,且均与所述直流减速电机的输出端同轴固定连接;所述直流减速电机固定安装在所述减震结构上,并与控制端电性连接,且与电池组电性连接。
5、进一步地,所述控制端包括主控制器、供电模块、无线通信模块和电机驱动模块;所述主控制器与供电模块、无线通信模块、电机驱动模块、液位传感器电性连接,且主控制器与识别装置无线通信连接并接收识别装置发送的识别结果;所述供电模块还与电池组电性连接,且与无线通信模块、电机驱动模块电性连接,用于为主控制器、无线通信模块和电机驱动模块供电;所述无线通信模块与控制手柄无线通信连接;所述电机驱动模块与喷剂泵电机、步进电机、直流减速电机电性连接。
6、进一步地,所述识别装置包括摄像组件和识别终端;所述摄像组件与所述识别终端电性连接;所述摄像组件采集土地图像数据并将图像数据传递给所述识别终端;所述识别终端上搭载轻量化杂草检测模型,轻量化杂草检测模型能够对图像数据进行实时杂草目标识别并输出杂草在图像中的平面坐标,识别终端向主控制器输出杂草在图像中的平面坐标。
7、进一步地,所述轻量化杂草检测模型以yolox-nano作为基准模型,使用增强的轻量化骨干shufflenetv-c替换基准模型yolox-nano的cspdarknet,并采用“四输入三输出”的ghost-fpn进行特征融合,同时引入glou loss作为位置回归的损失函数;所述轻量化杂草检测模型经过预训练和微调,能够高效准确地识别土地杂草植物。
8、进一步地,所述轻量化杂草检测模型的总损失函数由分类损失、位置回归损失和置信度损失三部分组成,分类损失表示对目标进行类别划分时产生的偏差,位置回归损失表示对目标具体位置定位产生的偏差,置信度损失表示预测类别信息时的概率大小损失,总损失函数计算公式表示为:
9、
10、其中:pi、ti、tj分别表示分类损失、位置回归损失和置信度损失,ltotal({pi},{ti},{tj})即为三者的总损失;识别结果中检测到的杂草目标为正样本,其他目标为负样本,i表示第i个正样本、j表示包括正样本和负样本在内的第j个任意样本,npos表示正样本数量;lcls和lreg只计算正样本的损失,lobg既计算正样本的损失也计算负样本的损失;
11、lcls和lobg采用交叉熵损失函数,表示为:
12、ce(p,y)=ce(pt)=-log(pt)
13、
14、其中:p表示预测值,y表示标签真值。
15、lreg使用giou loss函数进行计算:
16、
17、
18、其中:ti表示预测框的坐标信息,表示与预测框相匹配的真值坐标,area(ti)表示预测框面积,表示真值框面积;表示将预测框与真值框完全包围的最小外接矩形的面积。
19、进一步地,智能手机能够作为识别装置安装在车体上,智能手机上安装有预先搭载轻量化杂草检测模型的分析处理app;分析处理app接收智能手机的摄像头采集的土地图像数据,轻量化杂草检测模型对图像数据进行实时目标识别,并向主控制器输出杂草在图像中的平面坐标。
20、进一步地,所述主控制器能够将杂草在图像中的坐标换算成杂草相对于高压喷嘴喷射点的xy坐标,并且能够根据杂草的xy坐标规划车体的行进路径。
21、一种泵动喷剂式自动除草无人车的运行方法,该方法包括:
22、s1、控制端通过电机驱动模块启动直流减速电机,直流减速电机带动驱动轮匀速转动,从而带动车体匀速行驶;
23、s2、车体行驶过程中,识别装置的摄像组件采集土地图像数据,并将图像数据传递至识别终端,识别终端将图像数据输入轻量化杂草检测模型进行实时杂草目标识别;
24、s3、如果摄像组件采集的土地图像数据中出现杂草并被轻量化杂草检测模型捕获,则识别终端向主控制器输出杂草在图像中的平面坐标;如果摄像组件采集的土地图像数据中没有出现杂草,则继续重复s步骤,直至土地图像数据中出现杂草;
25、s4、主控制器将杂草在图像中的平面坐标换算成杂草相对于高压喷嘴喷射点的xy坐标,并规划车体的行进路径;
26、s5、主控制器通过电机驱动模块控制直流减速电机来控制车体的行进方向和速度,以改变高压喷嘴喷射点的y坐标;主控制器通过电机驱动模块控制步进电机来控制喷剂泵的移位,以改变高压喷嘴喷射点的x坐标;
27、s6、如果高压喷嘴喷射点的xy坐标与杂草的xy坐标重合,主控制器控制喷剂泵电机启动,高压喷嘴喷出除草剂,杀灭杂草;如果高压喷嘴喷射点的xy坐标不与杂草的xy坐标重合,则继续重复s-s步骤,直至高压喷嘴喷射点的xy坐标与杂草的xy坐标重合。
28、由于本发明采用了上述技术方案,本发明具有以下优点:
29、1.本发明通过喷药装置、控制装置、识别装置、滑动装置和驱动装置的配合设计,能够替代人工进行自动化除草;由识别装置识别到的土地图像数据传递给控制装置,控制装置根据图像数据来判断车体行进路线,并控制车体到达杂草所在位置,启动喷药装置对杂草进行定量喷药,不仅节省人力,而且环保性高、节约资源。
30、2.本发明的识别装置可以选择使用智能手机,任意一部智能手机上只需下载搭载了轻量化杂草检测模型的分析处理app,便能够代替识别装置发挥作用,无需另外安装识别装置,安装简便且节省了资源与时间。
- 还没有人留言评论。精彩留言会获得点赞!