一种基于无人机的园林绿化智能灌溉决策系统及方法与流程
本发明属于计算机、数据处理及智能控制,具体涉及一种基于无人机的园林绿化智能灌溉决策系统及方法。
背景技术:
1、在现有园林管理技术中,对园林中的绿化树木进行施肥和灌溉是一项至关重要的任务。然而,传统的人工控制喷洒车的方式存在一系列显著的缺陷和挑战,限制了其效率和实用性,严重影响了园林的维护和美化工作。
2、低效和人力资源密集:人工操作的方式通常需要大量的人力资源,因为工人必须手持控制喷枪或设备,逐株或逐个地进行施肥和喷洒。这不仅耗时费力,而且效率较低,特别是在大面积园林中。
3、困难的植株类型适应性:不同的植株类型和品种通常需要不同类型和比例的施肥和灌溉。人工方式难以根据具体植株的需求进行调整,因为操作员可能缺乏准确的信息和工具,以确保精确的施肥和灌溉。
4、无法覆盖难以进入的区域:在园林中,存在一些难以进入的区域,如狭窄的小径、高架树冠或有阻碍物的地方,传统的喷洒车无法涵盖这些区域,导致部分植物未能得到充分的关注。
5、不够精细和准确:人工控制存在人为因素,难以保证施肥和灌溉的均匀性和精确性。这可能导致过度或不足的养分投入,影响植物的生长和健康。
6、以上背景技术部分中公开的以上信息只是用来加强对本文所描述技术的背景技术的理解,因此,背景技术中可能包含某些信息,这些信息对于本领域技术人员来说并未形成在本国已知的现有技术。
技术实现思路
1、为了解决这些问题,本发明提出了一种基于智能无人机的园林绿化智能灌溉决策系统及方法,制定更加智能化的灌溉喷洒方案,可以提高效率、精确度和适应性,确保园林中的绿化树木得到更好的关怀和管理。可以根据植物类型、需水需肥程度和园林环境的要求来调整施肥和灌溉,提供更精确的服务,同时智能无人机能够覆盖难以进入的区域。这些新技术代表了园林管理的未来趋势,有望提高绿化质量和可持续性。
2、本发明采用的技术方案如下:
3、一种基于无人机的园林绿化智能灌溉决策方法,包括:
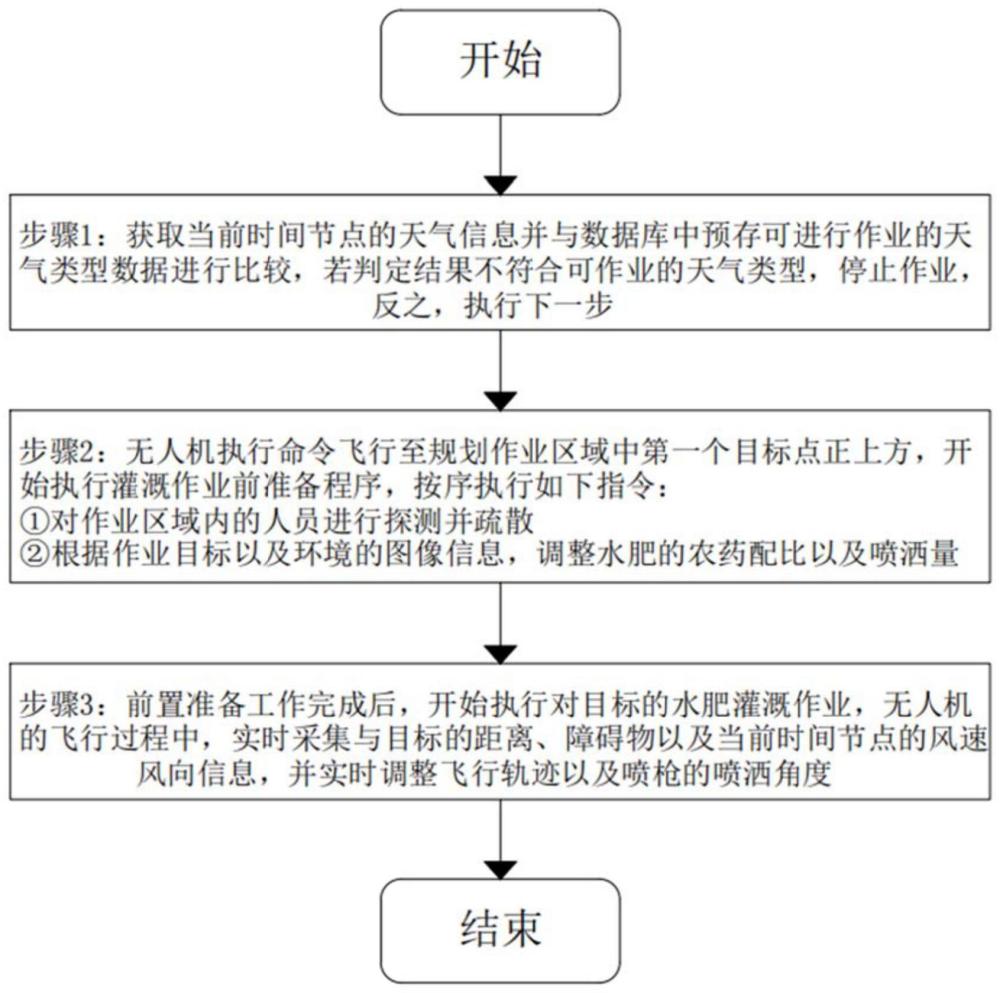
4、步骤1:获取当前时间节点的天气信息(天气预报信息以及实时天气信息)并与数据库中预存可进行作业的天气类型数据进行比较,若判定结果不符合可作业的天气类型,停止作业,反之,执行下一步;
5、步骤2:无人机执行命令飞行至规划作业区域中第一个目标点正上方,开始执行灌溉作业前准备程序,按序执行如下指令:
6、探测待作业区域内有无人员活动,若有则进行驱离,反之执行下一步
7、获取当前作业区域的作业目标以及环境的图像信息,并与数据库中预存数据进行比较,调整水肥的农药配比以及喷洒量,并确定无人机的飞行轨迹;
8、步骤3:前置准备工作完成后,开始执行对目标的水肥灌溉作业,无人机的飞行过程中,实时采集与目标的距离、障碍物以及当前时间节点的风速风向信息,并实时调整飞行轨迹以及喷枪的喷洒角度。
9、所述园林绿化智能灌溉决策方法基于智能控制系统实现,所述系统包括:
10、主控制装置以及分别与主控制装置电连接的天气信息获取模块、红外线探测装置、警报装置、图像采集装置、水肥配置装置、光照检测装置、温湿度检测装置、出水量控制装置、轨迹预设模块、距离检测装置、轨迹修正模块、障碍物识别装置、机翼控制模块、风速风向检测装置、喷枪角度控制装置及计时装置;
11、所述天气信息获取模块用于获取当前时间节点的天气信息;
12、所述红外线探测装置用于探测待作业区域内有无人员活动;
13、所述警报装置用于提醒人员离开待作业区域;
14、所述图像采集装置用于获取待作业目标植株的图像信息;
15、所述水肥配置装置用于调控水肥中的农药配比;
16、所述光照检测装置用于检测当前作业区域内的光照强度;
17、所述温湿度检测装置用于检测当前作业区域内的空气湿度、土壤温度和土壤湿度;
18、所述出水量控制装置用于调节单位时间内喷枪的出水量;
19、所述轨迹预设模块用于根据植株的形状特征生成无人机飞行轨迹;
20、所述距离检测装置用于实时获取无人机与目标的距离数据;
21、所述轨迹修正模块用于根据实时距离数据对飞行轨迹进行实时修正;
22、所述障碍物识别装置用于识别无人机在当前飞行轨迹方向的障碍物信息;
23、所述机翼控制模块用于调整无人机的飞行方向,使其紧急避让障碍物;
24、所述风速风向检测装置用于检测当前时间节点无人机受到的风速及风向;
25、所述喷枪角度控制装置用于控制水肥的喷射角度;
26、所述计时装置用于获取当前时间节点的时序信息。
27、所述步骤1和/或2中,主控制装置控制天气信息获取模块和计时装置常开,红外线探测装置、警报装置、图像采集装置、水肥配置装置、光照检测装置、温湿度检测装置、出水量控制装置及轨迹预设模块常闭;
28、所述天气信息获取模块获取到当前时间节点的天气信息符合作业条件,主控制装置控制无人机执行命令飞行至规划作业区域中第一个目标点正上方,并控制红外线探测装置开启;
29、红外线探测装置检测待作业区域内有无人员活动,若有,则控制警报装置发出报警,驱散作业区域内人员,反之,主控制装置控制图像采集装置、光照检测装置及温湿度检测装置开启;
30、图像采集装置获取待作业目标的图像信息,并根据目标种类以及健康程度,控制水肥配置装置开启,调整水肥的农药配比(配方、浓度);
31、光照检测装置及温湿度检测装置分别获取当前作业区域内的光照强度、空气湿度、土壤温度和土壤湿度,主控制装置并根据上述参数,控制出水量控制装置开启,调节当前目标所需灌溉用水量;
32、水肥的配比及用水量确定完毕后,主控制装置控制图像采集装置获取目标的三维立体信息,并输入轨迹预设模块中预设好的飞机轨迹生成模型,得到当前目标的飞行轨迹。
33、所述温湿度检测装置包括空气湿度检测装置以及土壤温湿度检测装置,所述空气湿度检测装置以及土壤温湿度检测装置均为提前预设在园林各作业区域中,空气湿度检测装置固定在地面上,土壤温湿度检测装置预埋在土壤中。
34、所述主控制装置控制距离检测装置、轨迹修正模块、障碍物识别装置、机翼控制模块、风速风向检测装置及喷枪角度控制装置常闭;
35、所述步骤2灌溉作业前置准备工作完成后;
36、主控制装置控制距离检测装置开启,距离检测装置获取当前时间节点无人
37、机
38、与目标之间的实时距离,并反馈至主控制装置,主控制装置将其输入至轨迹修正模块中,并控制机翼控制模块开启,实时修正飞行轨迹;
39、无人机按照修正后的飞行轨迹进行作业过程中,主控制装置同时控制障碍物检测装置和风速风向检测装置开启;
40、障碍物检测装置识别到无人机在当前飞行轨迹方向存在障碍物,主控制装置控制机翼控制模块开启,调整无人机的飞行方向,使其紧急避让障碍物
41、风速风向检测装置检测当前时间节点无人机受到的风速及风向,主控制装置接收风速和风向信息并结合当前与目标之间的距离信息,对上述数据进行分析处理,发送指令控制喷枪角度控制装置开启,调整喷枪的喷射方向。
42、所述系统还包括火焰检测装置,主控制装置控制火焰检测装置常闭,主控制装置控制无人机执行命令飞行至规划作业区域中第一个目标点正上方,并控制火焰检测装置开启,火焰检测装置检测待作业区域内有无发生火灾,若有,则控制警报装置向园区工作人员发出报警,并向报警平台发送火灾报警信息。
43、所述系统还包括药量检测装置以及电量检测装置,主控制装置控制药量检测装置以及电量检测装置常开,在执行灌溉作业过程中,全程对无人机的药量以及电量进行实时监测,当前药量以及电量低于报警值,不足以完成本次作业用量时,控制无人机返回。
44、一种基于无人机的园林绿化智能灌溉决策系统,用于实现所述的园林绿化智能灌溉决策方法。
45、一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被运行时执行所述的园林绿化智能灌溉决策方法
46、综上所述,由于采用了上述技术方案,本发明的有益效果是:
47、相比于现有技术,本发明设计了一套集成天气信息获取模块、红外线探测装置、警报装置、图像采集装置、水肥配置装置、光照检测装置、温湿度检测装置、出水量控制装置、轨迹预设模块、距离检测装置、轨迹修正模块、障碍物识别装置、机翼控制模块、风速风向检测装置、喷枪角度控制装置及计时装置的园林绿化智能灌溉决策系统,该系统基于无人机平台实现,用于对无人机在景区园林绿化灌溉作业中提供智能化决策方案指导,通过各个装置对若干种数据采集分析结合反馈控制机制,各个装置之间有序配合启动,协同作用,实现对无人机的农药配比、喷洒量、飞行轨迹控制和修正,喷射角度的精准控制,旨在制定更加智能化的灌溉喷洒决策方案,降低了人工劳动强度的同时,可以提高大面积园林的灌溉效率,针对不同类型的植株进行精准施肥灌溉,保证施肥和灌溉的均匀性和精确性,确保园林中的绿化树木得到更好的关怀和管理,代表了园林管理的未来趋势,有望提高绿化质量和可持续性。
- 还没有人留言评论。精彩留言会获得点赞!