一种池塘底部水草清理机器人的制作方法
本发明涉及水下机器人,具体为一种池塘底部水草清理机器人。
背景技术:
1、适合在鱼塘中种植的水草有很多,比如苦草、卷叶龙须草、皇冠草等等。还有一些不属于水草,但能养在水中,比如牛毛草,水草有三个作用,一是作为食物提供给鱼类,二是为小鱼提供庇护,避免被大鱼吃掉,三是净化水质,但是位置避免鱼塘中水草植物的过度生长,通常需要定期对水草进行清理,避免水草蔓延影响水质。
2、目前用于池塘底部水草清理用的机器人,在对池底水草进行修剪时,通常是采用滚刀破碎切割的方式进行修剪的,滚刀在对韧性较强的水草颈部切割时,当滚刀与水草颈部接触时的撞击力,容易会将水草弹开,使得现有的机器人对于一些韧性较强的水草修剪时仍比较吃力。
技术实现思路
1、为此,本发明提供一种池塘底部水草清理机器人,以解决上述的问题。
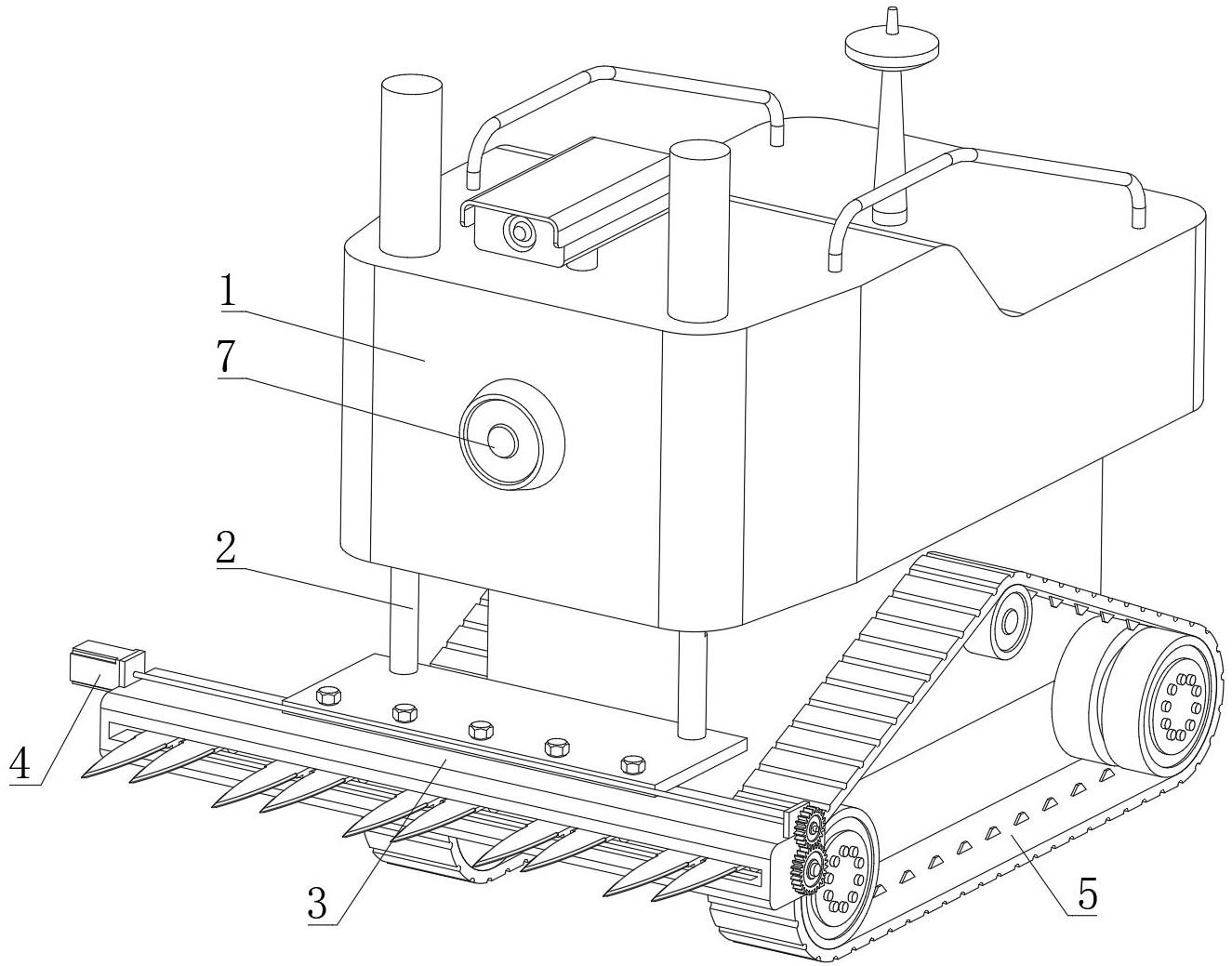
2、本发明提供如下技术方案:一种池塘底部水草清理机器人,包括机器人主体,所述机器人主体的内部滑动设有高度调节机构,所述高度调节机构活动贯穿机器人主体的内部且延伸至其底部外围,所述高度调节机构的底部固定设有剪切机构,所述剪切机构的顶部转动设有剪切动力单元;
3、所述高度调节机构包括安装调节板,所述安装调节板位于机器人主体的底部,所述安装调节板的顶部固定连接有两个前后分布的调节杆,两个所述调节杆贯穿机器人主体的底部,且延伸至内部,两个所述调节杆与机器人主体的底部滑动连接;
4、所述剪切机构包括剪切框,所述剪切框的左侧面向内开设有方腔室,所述方腔室的顶壁及底壁,靠近其开口处的一侧均开设有t形滑槽,两个所述t形滑槽的内部均滑动连接有t形滑块,两个所述t形滑块的相抵面上均固定连接有剪刀头,两个所述剪刀头呈上下分布,所述剪刀头位于t形滑槽之间,且所述剪刀头活动贯穿方腔室,并延伸至剪切框的左侧面外部。
5、作为本发明优选的方案,两个所述调节杆的右侧外壁上开设有多个上下分布的啮合齿,所述机器人主体的底壁,位于两个调节杆的右端固定连接有步进电机,所述步进电机的输出轴端部外壁上固定连接有蜗杆,所述蜗杆的顶部啮合有蜗轮,所述蜗轮的中心孔中固定连接有转杆,所述转杆的外壁上转动套设有支撑座,所述支撑座与机器人主体的底壁固定连接,所述转杆的外壁上固定连接有两个前后分布的调节齿轮,两个所述调节齿轮位于支撑座的外侧,且两个所述调节齿轮与两个啮合齿相啮合。
6、作为本发明优选的方案,所述t形滑块远离剪刀头的一侧面下部固定连接有受力托板,所述受力托板呈弧形设置,且所述受力托板的内弧面端部固定连接有滑销,所述方腔室的内部转动设有转动轴,所述转动轴的端部分别与剪切框的正面及背面转动连接,所述转动轴的外壁上固定连接有圆柱凸轮,所述圆柱凸轮的外壁上开设有凸轮槽,所述圆柱凸轮位于两个受力托板之间,且所述圆柱凸轮的外壁与上下分布的两个受力托板的内湖面贴合,所述凸轮槽与上下分布的两个滑销共同滑动连接。
7、作为本发明优选的方案,所述圆柱凸轮的数量为多个,多个所述圆柱凸轮均固定连接在转动轴的外壁上,且多个所述圆柱凸轮呈线性阵列分布,所述圆柱凸轮的数量与剪刀头的数量及位置均相互对应。
8、作为本发明优选的方案,所述剪切动力单元包括两个固定座,两个所述固定座分别与剪切框的顶部前端以及顶部后端固定连接,其中一个所述固定座的外侧面上固定连接有伺服电机,两个所述固定座之间转动连接有一个扭力杆,所述扭力杆的其中一端与伺服电机的输出轴端部通过联轴器固定连接,所述扭力杆远离伺服电机的一端外壁上固定连接有主动齿轮,所述主动齿轮的底部啮合有被动齿轮,所述被动齿轮与转动轴的一端外壁固定连接。
9、作为本发明优选的方案,所述机器人主体的正面及背面均转动设有履带轮,所述履带轮的输入轴与机器人主体内部设置的动力输出轴通过联轴器连接,两个所述履带轮位于剪切机构的右端。
10、作为本发明优选的方案,所述机器人主体的顶部固定设有水下摄像头,所述机器人主体的左侧面中部固定连接有水下照明灯。
11、与现有技术相比,本发明的有益效果是:
12、1、本发明中,通过设置高度调节机构,利用高度调节机构中的步进电机的输出轴驱动蜗杆转动,进一步带动与蜗杆啮合的蜗轮转动,使得与蜗轮固定连接的转杆在支撑座的内孔中转动,进一步带动与转杆固定连接的两个调节齿轮转动,受到与啮合齿的啮合作用,带动调节杆在机器人主体内部开设的滑孔中上下滑动,从而带动安装调节板上下同步移动,进一步带动剪切机构上下同步移动,从而对剪切机构的高度进行调节,以便于对水草的切割高度进行调整,进一步提升了该水下机器人适用性。
13、2、本发明中,通过设置剪切动力单元,利用剪切动力单元的伺服电机,通过伺服电机的输出轴驱动扭力杆转动,从而带动与扭力杆固定连接的主动齿轮转动,进一步使得与主动齿轮啮合的被动齿轮转动,使得与被动齿轮固定连接的转动轴转动,带动多个圆柱凸轮转动,使得圆柱凸轮外壁上的凸轮槽同步转动,从而推动与凸轮槽滑动连接的上下两个滑销,在t形滑块与t形滑槽的滑动导向作用下,进行交叉往复式摆动,从而带动两个剪刀头同步摆动,对水草进行切割清理,避免池塘底部水草的肆意生长而影响水质,同时利用两个剪刀进行交叉往复式剪切的方式,可以对池塘底部一些韧性较强的水草进行清理,避免出现清理不完整的情况发生。
14、3、本发明中,通过设置多个圆柱凸轮及多个剪刀头,从而提升了剪切机构的清理范围,进一步提高了剪切机构的清理效率。
技术特征:
1.一种池塘底部水草清理机器人,包括机器人主体(1),其特征在于:所述机器人主体(1)的内部滑动设有高度调节机构(2),所述高度调节机构(2)活动贯穿机器人主体(1)的内部且延伸至其底部外围,所述高度调节机构(2)的底部固定设有剪切机构(3),所述剪切机构(3)的顶部转动设有剪切动力单元(4);
2.根据权利要求1所述的一种池塘底部水草清理机器人,其特征在于:两个所述调节杆(202)的右侧外壁上开设有多个上下分布的啮合齿(203),所述机器人主体(1)的底壁,位于两个调节杆(202)的右端固定连接有步进电机(204),所述步进电机(204)的输出轴端部外壁上固定连接有蜗杆(205),所述蜗杆(205)的顶部啮合有蜗轮(206),所述蜗轮(206)的中心孔中固定连接有转杆(207),所述转杆(207)的外壁上转动套设有支撑座(208),所述支撑座(208)与机器人主体(1)的底壁固定连接,所述转杆(207)的外壁上固定连接有两个前后分布的调节齿轮(209),两个所述调节齿轮(209)位于支撑座(208)的外侧,且两个所述调节齿轮(209)与两个啮合齿(203)相啮合。
3.根据权利要求1所述的一种池塘底部水草清理机器人,其特征在于:所述t形滑块(304)远离剪刀头(305)的一侧面下部固定连接有受力托板(306),所述受力托板(306)呈弧形设置,且所述受力托板(306)的内弧面端部固定连接有滑销(307),所述方腔室(302)的内部转动设有转动轴(3010),所述转动轴(3010)的端部分别与剪切框(301)的正面及背面转动连接,所述转动轴(3010)的外壁上固定连接有圆柱凸轮(308),所述圆柱凸轮(308)的外壁上开设有凸轮槽(309),所述圆柱凸轮(308)位于两个受力托板(306)之间,且所述圆柱凸轮(308)的外壁与上下分布的两个受力托板(306)的内湖面贴合,所述凸轮槽(309)与上下分布的两个滑销(307)共同滑动连接。
4.根据权利要求3所述的一种池塘底部水草清理机器人,其特征在于:所述圆柱凸轮(308)的数量为多个,多个所述圆柱凸轮(308)均固定连接在转动轴(3010)的外壁上,且多个所述圆柱凸轮(308)呈线性阵列分布,所述圆柱凸轮(308)的数量与剪刀头(305)的数量及位置均相互对应。
5.根据权利要求1所述的一种池塘底部水草清理机器人,其特征在于:所述剪切动力单元(4)包括两个固定座(401),两个所述固定座(401)分别与剪切框(301)的顶部前端以及顶部后端固定连接,其中一个所述固定座(401)的外侧面上固定连接有伺服电机(402),两个所述固定座(401)之间转动连接有一个扭力杆(403),所述扭力杆(403)的其中一端与伺服电机(402)的输出轴端部通过联轴器固定连接,所述扭力杆(403)远离伺服电机(402)的一端外壁上固定连接有主动齿轮(404),所述主动齿轮(404)的底部啮合有被动齿轮(405),所述被动齿轮(405)与转动轴(3010)的一端外壁固定连接。
6.根据权利要求1所述的一种池塘底部水草清理机器人,其特征在于:所述机器人主体(1)的正面及背面均转动设有履带轮(5),所述履带轮(5)的输入轴与机器人主体(1)内部设置的动力输出轴通过联轴器连接,两个所述履带轮(5)位于剪切机构(3)的右端。
7.根据权利要求1所述的一种池塘底部水草清理机器人,其特征在于:所述机器人主体(1)的顶部固定设有水下摄像头(6),所述机器人主体(1)的左侧面中部固定连接有水下照明灯(7)。
技术总结
本发明涉及水下机器人技术领域,具体为一种池塘底部水草清理机器人,包括机器人主体,所述机器人主体的内部滑动设有高度调节机构,所述高度调节机构活动贯穿机器人主体的内部且延伸至其底部外围,所述高度调节机构的底部固定设有剪切机构。通过设置高度调节机构驱动剪切机构进行上下的高度位置的调整,以便于对水草的切割高度进行调整,提升了该水下机器人适用性,同时通过设置剪切动力单元驱动剪切机构中的多个剪刀头进行交叉往复式摆动,从而带动两个剪刀头同步摆动,对水草进行切割清理,避免池塘底部水草的肆意生长而影响水质,同时交叉往复式剪切的方式,可以对池塘底部一些韧性较强的水草进行清理,避免出现清理不完整的情况发生。
技术研发人员:刘状
受保护的技术使用者:长春喜成科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!