一种露地蔬菜肥药精准施用装备及其控制系统的制作方法
本发明涉及农业施药领域,具体涉及一种露地蔬菜肥药精准施用装备及其控制系统。
背景技术:
1、长期以来,我国农药、化肥受到施用技术、农机装备、作业人员等多因素影响,存在肥药施用量大、利用率低等现实情况,导致农业生产成本增加、农残超标、作物药害、环境污染和耕地质量退化等一系列问题。近年来,农药化肥使用量零增长行动目标顺利实现,化肥农药持续减量,连续4年实现负增长。我国三大粮食作物化肥、农药利用率双双达40%以上,为进一步推动农业生产方式全面绿色转型,农业农村部要求力争到2025年化肥农药利用率再提高3个百分点。
2、据调查,我国露地蔬菜与设施蔬菜病虫害有1600余种,常年发生的有500余种,每年必须防治的病虫有50~70种,其中难以防控的有10余种,一般产量损失20%~30%,严重时损失达50%以上,甚至绝收。目前,蔬菜病虫仍大多采用化学农药防控,施药次数较多,是形成农药面源污染的重要因素,也是蔬菜产品农残超标的控制关键点。
3、采用大田作物喷药机喷雾作业肥药对靶性差、有效利用率低、飘移流失严重等问题,传统的喷头工作压力越大,其流量越大,雾滴粒径越小,但小雾滴会加剧漂移。
4、因此,如何提高肥药利用率、减少肥药用量成为亟需解决的关键问题,目前我国肥药精准施用关键核心技术及部件缺乏,作业装备智能化程度低,作业质量严重依赖操纵人员经验。
技术实现思路
1、发明目的:本发明目的在于针对现有技术的不足,提供一种露地蔬菜肥药精准施用装备及其控制系统,通过对肥药喷施作业质量关联参数进行控制和多参数匹配智能优化调控,实现甘蓝、西兰花等露地蔬菜肥药精准施用。
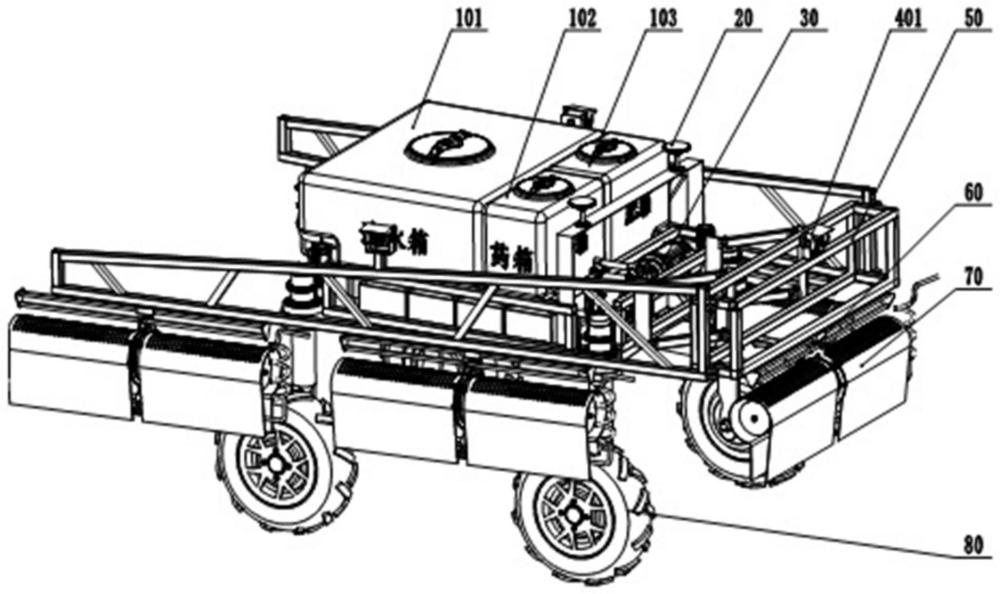
2、技术方案:本发明所述露地蔬菜肥药精准施用装备,包括车架,所述车架底部安装有四轮驱动轮毂总成,所述车架上固定有清水箱、药箱、肥箱、隔膜泵;所述车架前侧通过喷杆高度调节件连接有主支撑架,所述主支撑架两侧连接有侧支撑架,所述主支撑架、侧支撑架下方通过横移机构连接有风送喷杆喷雾总成;所述风送喷杆喷雾总成包括风轮电机,风轮电机两端连接有离心风机叶轮,沿离心风机叶轮外部轮廓设有导向罩,所述导向罩顶部设有进风口,底部向下延伸形成有出风通道,所述出风通道内上下布置有风力输送杆、喷杆,所述风力输送杆上间隔设有风力输出接头,所述喷杆上间隔设有喷头,所述风力输出接头与喷头上下对应设置,所述喷头上套设有扇形风帽;所述导向罩和风轮电机通过电机支架相连,所述电机支架还连接有角度调节机构,所述角度调节机构带动所述导向罩转动使得导向罩底部的出风通道沿竖直方向进行前后调整;所述喷头用于药肥液雾滴化,所述风力输送杆通过软管与压缩机相连以提供气流,所述风力输出接头通过胶管与扇形风帽顶部连,将气流输送至所述扇形风帽处以增加雾滴的初始速度,所述风轮电机驱动两个离心风机叶轮旋转以产生低压大风量气流,该低压大风量气流由所述进风口流入所述导向罩内并经所述出风通道流出,以对抗环境中风力引起的雾滴漂移。
3、进一步完善上述技术方案,所述主支撑架上方设有主摄像头,所述侧支撑架上方设有侧摄像头,所述横移机构包括直线电机和导杆组,所述直线电机分布在所述主支撑架、侧支撑架底部,所述导杆组具有三根呈三角分布的横移导杆,其中底部的横移导杆与所述电机支架顶部相连,顶部的两根横移导杆贯穿连接至所述直线电机内;所述主摄像头用于定位车架前方的中心垄、侧摄像头用于定位车架前方的侧边垄,根据定位信息控制所述直线电机,在所述直线电机的驱动下所述横移导杆沿直线电机内部移动,以带动所述风送喷杆喷雾总成做横向移动对准所述中心垄、侧边垄。
4、进一步地,所述喷杆高度调节件为四连杆机构,所述四连杆机构用于调节所述主支撑架相对于地面的高度,从而调节与主支撑架、侧支撑架相连风送喷杆喷雾总成的离地高度;所述主支撑架与侧支撑架铰接相连,使得所述侧支撑架工作时以与主支撑架水平对齐,在收纳状态下与主支撑架垂直对齐。
5、进一步地,所述导向罩通过导向罩连接件与所述电机支架上腰圆型孔相连,所述角度调节机构包括电动推杆,所述电动推杆一端与所述底部的横移导杆固定相连,另一端与所述导向罩连接件相连;初始状态时,所述导向罩的出风通道保持垂直向下,所述电动推杆的推动导向罩连接件,驱动所述导向罩沿腰圆形孔转动,使得出风通道能够前后偏移-5~5°。
6、用于控制上述露地蔬菜肥药精准施用装备的系统,包括:作物与环境信息实时采集模块、自主行走控制模块、对垄控制模块、药肥控制模块、精准喷施控制模块;所述作物与环境信息实时采集模块包括风速传感器、风向传感器、超声波距离传感器、旋转编码器、主摄像头、侧摄像头、叶片湿度传感器,所述风速传感器、风向传感器用于感应作业环境中的自然风在喷杆长度方向的风速和方向,所述超声波距离传感器用于测量喷头与作物冠层的垂直距离,所述旋转编码器用于实时采集车架的行走速度,所述主摄像头、侧摄像头用于定位中心垄、侧边垄的位置,所述叶片湿度传感器用于感应作业过程中雾滴的浓度大小;所述自主行走控制模块用于根据主摄像头拍摄中心垄的位置,输出车架转向的角度,并根据采集到的实时行走速度,控制车架前进的角度和速度;所述对垄控制模块用于根据主摄像头、侧摄像头分别拍摄的中心垄、侧边垄位置,输出主支撑架、侧支撑架底部直线电机的偏移距离,使得直线电机控制其下方的风送喷杆喷雾总成对准中心垄、侧边垄;以及根据所述超声波距离传感器用于测量的喷头与作物冠层的垂直距离,通过所述四连杆机构控制主支撑架、侧支撑架高度以实现喷杆离地高度的调整;所述药肥控制模块用于接收施药施肥处方图,输出指定药肥比的液体,并经隔膜泵输送至喷杆上的喷头处;所述精准喷施控制模块用于获取当前环境中的风速、风向,喷杆离地高度,生成风送喷杆喷雾总成的作业参数,所述作业参数包括离心风机叶轮风量、导向罩的角度、喷头压力、风力输送杆压力;以及根据叶片湿度传感器采集的雾滴浓度大小,通过雾滴沉积监测传感器网络计算漂移率,并通过计算得到的漂移率对所述作业参数进行反馈调节。
7、进一步地,所述自主行走控制模块用于根据主摄像头拍摄中心垄的位置,输出车架转向的角度,并根据采集到的实时行走速度,控制车架前进的角度和速度包括:获取车架当前位置和当前行进方向,计算车架相对于中心垄中心线位置的偏移量d和偏移角度,根据偏移量和偏移角度,确定路径曲线,计算路径曲线上各点的曲率k,利用曲率信息k,调整车架的转向角度和速度信息;将转向角度和速度信息发送至车架控制模块,控制车架的转向和行驶。
8、进一步地,所述精准喷施控制模块用于获取当前环境中的风速、风向,喷杆离地高度,生成风送喷杆喷雾总成的作业参数包括:
9、根据风速确定离心风机叶轮风量:将环境风速分为低风速区间、中风速区间、高风速区间,所述风轮电机配置有高转速、中转速、低转速可调档位,对应高转速、中转速、低转速分别在所述出风通道形成高辅助气流速度、中辅助气流速度、低辅助气流速度;当获取的环境风速位于低风速区间时,将所述风轮电机的转速设定为低转速,以在所述出风通道形成低辅助气流速度;当获取的环境风速位于中风速区间时,将所述风轮电机的转速设定为中转速,以在所述出风通道形成中辅助气流速度;当获取的环境风速位于高风速区间时,将风轮电机的转速设定为高转速,以在所述出风通道形成高辅助气流速度;
10、根据风向确定导向罩的倾角:将环境风向分为前风向区间、中风向区间、后风速区间,当获取的环境风向位于前风向区间,所述电机推杆带动所述导向罩向前转动;当获取的环境风向位于前风向区间,所述导向罩保持在默认角度,不进行调整;当获取的环境风向位于后风向区间,所述电机推杆带动所述导向罩向后转动;
11、将喷杆离地高度调节范围分为低、中、高三个区间,将喷头压力、风力输送杆压力调节范围设定为低、中、高三个区间;当喷杆离地高度处于低范围区间时,调整喷头压力、风力输送杆压力位于较低范围,当喷杆离地高度处于中范围区间时,调整喷头压力、风力输送杆压力位于居中范围,当喷杆离地高度大于高范围区间时,调整喷头压力、风力输送杆压力位于较高范围。
12、有益效果:与现有技术相比,本发明的优点在于:针对我国露地蔬菜不同产区品种、种植模式、垄距(株行距) 等差异大,田间地面不平整,肥药喷施作业装备通行困难等问题,研究作业底盘轮距无级可调技术,研发可变特性转向系统、轮距调节机构及控制系统,创制四轮独立电驱动可变轮距作业底盘,实现底盘轮距、行走速度的无级调控与任意半径转弯及调头,为露地蔬菜肥药精准喷施作业提供高通过性、高适应性作业底盘。
13、本发明设计独有的导向罩和扇形风帽结构,导向罩具备灵活性,能够根据获取的风向调整倾角,配合离心风机产生的气流,采用低压大风量方式实现对喷雾进行作用,以克服自然界中的自然风以及车架行走速度引起的漂移。
14、增加喷头出口液体的初始速度会使液体雾化为更小的雾滴,液体的初始速度是由喷雾压力决定的,当喷雾压力增加到使气动力打破液体分子表面受力平衡时,液体就会破碎,形成雾滴,扇形风帽的作用是高压小气流,加快雾滴的初速度减少雾滴传递时间。
15、肥药喷施作业质量关联参数(行走速度、喷雾压力、流量、风送风力、喷杆高度等)露地蔬菜肥药精准喷施多参数匹配智能优化调控策略。
- 还没有人留言评论。精彩留言会获得点赞!