一种苹果采摘机器人
本发明属于农业机械领域,涉及一种苹果采摘机器人。
背景技术:
1、现有的苹果采摘方式,通常采用人工采摘的方式,存在工作效率低、劳动强度大的缺陷,也有人提出了机械采摘的方案,例如中国专利号202220407779.9的实用新型专利,公开了一种轻量化双臂苹果采摘机器人,通过简化机械臂结构,轻量化现有用于采摘苹果的工业六轴机械臂。该方案存在的缺陷:需要人工确定苹果的位置并进行人为控制,苹果采摘机器人作业效率较低。
技术实现思路
1、为了克服已有苹果采摘机器人的作业效率较低的不足,本发明提供了一种提升作业效率的苹果采摘机器人。
2、本发明解决其技术问题所采用的技术方案是:
3、一种苹果采摘机器人,包括直角坐标机械机构、气动采摘装置、视觉系统以及控制设备,所述气动采摘装置位于所述直角坐标机械机构的动作端,所述视觉系统位于所述气动采摘装置的前端工作部位,所述视觉系统用于采集视觉范围果树图像并定位苹果位置,所述视觉系统与所述控制设备连接,所述控制设备用于按照定位苹果位置和当前位置确定采摘路径并依照采摘路径向直角坐标机械机构发出控制指令的采摘控制模块,所述采摘控制模块的输出与所述直角坐标机械机构的受控端连接。
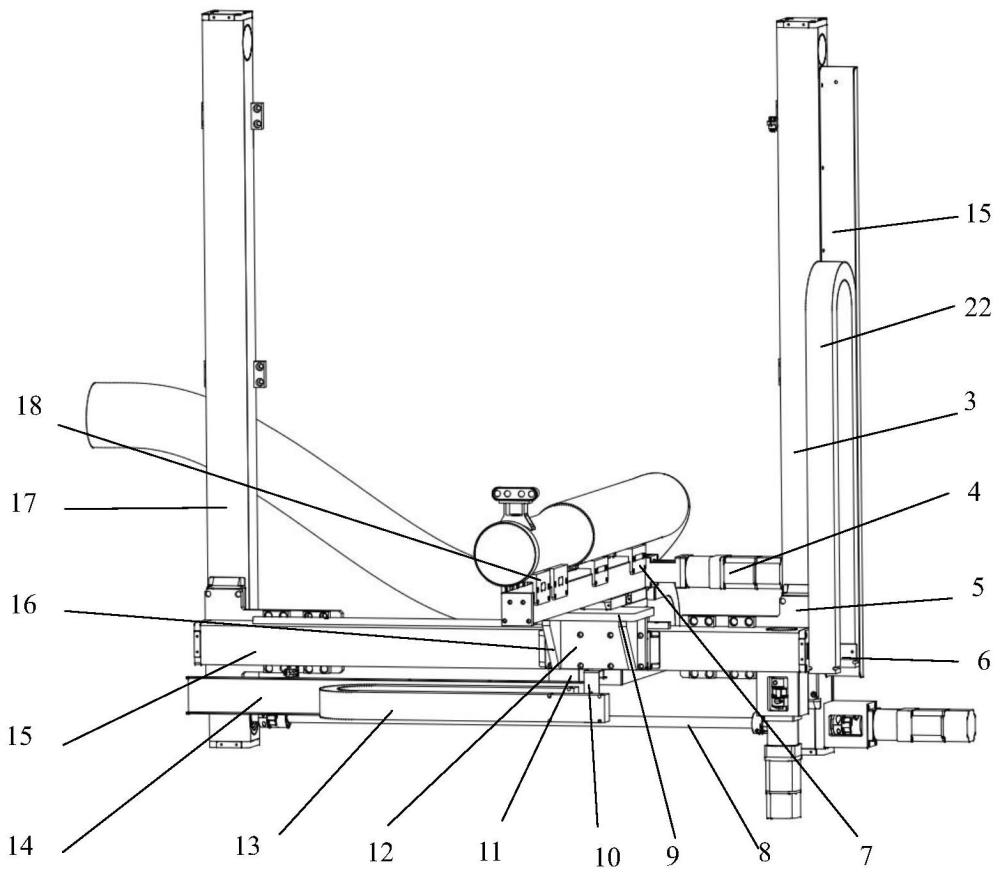
4、进一步,所述直角坐标机械机构包括第一拖链、第二拖链、第三拖链、第一直线模组、第二直线模组、第三直线模组和第四直线模组,所述第一直线模组和第二直线模组平行竖直固定在左右两侧,第二直线模组下端的驱动机构通过联轴器与连杆的一端相接,所述连杆另一端通过另一个联轴器连接至第一直线模组,所述第三直线模组沿左右方向垂直固定在一直线模组和第二直线模组前面,第四直线模组分别垂直第一直线模组和第三直线模组,沿前后方向固定在第三直线模组上方;四个直线模组都由滑轨和滑块组成,滑轨与滑块可直线滑动连接,其中第二直线模组、第三直线模组和第四直线模组带有电机模块;
5、第一拖链固定板固定在第二直线模组一侧,用于固定第一拖链的位置和移动方向;第一拖链连接板呈l型,两端分别有连接孔,用于连接第一拖链和第三直线模组,使得第一拖链能够随着第三直线模组上下移动;所述第三直线模组通过两块第三直线模组固定板,左右两端分别固定在第一直线模组和第二直线模组的滑块上,当第二直线模组上的电机工作时,能够使得滑块带动第三直线模组上下移动,从而带动气动采摘装置的上下移动;
6、第四直线模组下连接板通过螺栓固定在第三直线模组的滑块上,第四直线模组上连接板上方固定在第四直线模组下方的滑块上,第四直线模组上连接板下方固定在第三直线模组的外接导轨小滑块上,上连接板和下连接板通过肋板焊接连接;当第三直线模组上的电机工作时,能够使得滑块带动第四直线模组左右移动,从而带动采摘机构的左右移动;第二拖链连接在第二拖链固定板上,第二拖链和第二拖链固定板的一端都由第二拖链连接板与第三直线模组连接,使其能够跟随第三直线模组上下移动,而且第二拖链能够跟随第三直线模组上的滑块左右移动。
7、优选的,所述第一直线模组、第二直线模组、第三直线模组和第四直线模组均采用皮带模组。皮带模组的结构形式采用现有常用机械结构方式实现。
8、再进一步,所述气动采摘装置包括采摘管和软管,所述采摘管位于所述直角坐标机械机构的动作端,所述采摘管的末端套入软管,所述软管的末端与苹果收集设备相连,所述软管另一端连接用于为采摘管采摘吸入苹果提供动力的气动装置。
9、所述视觉系统包括视觉摄像机和用于根据视觉摄像机拍摄的果树图像定位苹果位置的苹果定位模块,所述视觉摄像机安装在采摘管的前端上部,所述视觉摄像机的输出与所述苹果定位模块连接。该方案中,苹果位置定位方法采用了现有技术的常用方法实现。
10、优选的,所述视觉摄像机固定在相机固定件上,所述相机固定件的上下两端分别设有螺纹孔,将视觉摄像机固定在采摘管上。
11、本发明的有益效果主要表现在:有效提升作业效率。
技术特征:
1.一种苹果采摘机器人,其特征在于,包括直角坐标机械机构、气动采摘装置、视觉系统以及控制设备,所述气动采摘装置位于所述直角坐标机械机构的动作端,所述视觉系统位于所述气动采摘装置的前端工作部位,所述视觉系统用于采集视觉范围果树图像并定位苹果位置,所述视觉系统与所述控制设备连接,所述控制设备用于按照定位苹果位置和当前位置确定采摘路径并依照采摘路径向直角坐标机械机构发出控制指令的采摘控制模块,所述采摘控制模块的输出与所述直角坐标机械机构的受控端连接。
2.如权利要求1所述的一种苹果采摘机器人,其特征在于,所述直角坐标机械机构包括第一拖链、第二拖链、第三拖链、第一直线模组、第二直线模组、第三直线模组和第四直线模组,所述第一直线模组和第二直线模组平行竖直固定在左右两侧,第二直线模组下端的驱动机构通过联轴器与连杆的一端相接,所述连杆另一端通过另一个联轴器连接至第一直线模组,所述第三直线模组沿左右方向垂直固定在一直线模组和第二直线模组前面,第四直线模组分别垂直第一直线模组和第三直线模组,沿前后方向固定在第三直线模组上方;四个直线模组都由滑轨和滑块组成,滑轨与滑块可直线滑动连接,其中第二直线模组、第三直线模组和第四直线模组带有电机模块;
3.如权利要求2所述的一种苹果采摘机器人,其特征在于,所述第一直线模组、第二直线模组、第三直线模组和第四直线模组均采用皮带模组。皮带模组的结构形式采用现有常用机械结构方式实现。
4.如权利要求1~3之一所述的一种苹果采摘机器人,其特征在于,所述气动采摘装置包括采摘管和软管,所述采摘管位于所述直角坐标机械机构的动作端,所述采摘管的末端套入软管,所述软管的末端与苹果收集设备相连,所述软管另一端连接用于为采摘管采摘吸入苹果提供动力的气动装置。
5.如权利要求1~3之一所述的一种苹果采摘机器人,其特征在于,所述视觉系统包括视觉摄像机和用于根据视觉摄像机拍摄的果树图像定位苹果位置的苹果定位模块,所述视觉摄像机安装在采摘管的前端上部,所述视觉摄像机的输出与所述苹果定位模块连接。该方案中,苹果位置定位方法采用了现有技术的常用方法实现。
6.如权利要求5所述的一种苹果采摘机器人,其特征在于,所述视觉摄像机固定在相机固定件上,所述相机固定件的上下两端分别设有螺纹孔,将视觉摄像机固定在采摘管上。
技术总结
一种苹果采摘机器人,包括直角坐标机械机构、气动采摘装置、视觉系统以及控制设备,所述气动采摘装置位于所述直角坐标机械机构的动作端,所述视觉系统位于所述气动采摘装置的前端工作部位,所述视觉系统用于采集视觉范围果树图像并定位苹果位置,所述视觉系统与所述控制设备连接,所述控制设备用于按照定位苹果位置和当前位置确定采摘路径并依照采摘路径向直角坐标机械机构发出控制指令的采摘控制模块,所述采摘控制模块的输出与所述直角坐标机械机构的受控端连接。本发明提供了一种提升作业效率的苹果采摘机器人。
技术研发人员:杨庆华,傅振宇,王志恒,荀一
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!