一种植保无人机的智能定位及施药方法、系统及介质
本发明涉及植保无人机控制,尤其涉及一种植保无人机的智能定位及施药方法、系统及介质。
背景技术:
1、随着科学技术的不断发展和进步,无人机从一开始的应用于测绘摄像、侦查监视及定位识别等领域逐步扩展至农业领域。在农业生产过程中,对农作物影响最大的因素之一就是病虫害,其会严重影响农作物的产量和质量。植保无人机在喷药过程中具有对农作物无损伤、作业强度低及作业效率高等特点,现已逐步取代传统的人工喷药作业方式,并广泛应用于绿色农业植保领域。无人机定位系统主要由用户端、地面基站、驱动控制器、速度传感器、飞行控制器、通用无线分组业务(general packet radio services,gprs)网络及定位终端导航卫星等组成。飞行主控制器先对不同模块信息进行精准采集,用户端再对全球定位系统(global positioning system,gps)等模块定位数据进行收集、处理后完成传输。然而,现如今的定位技术还不够精确,容易受到电磁波的影响,从而使得无人机的定位精度发生偏移,从而使得植保无人机的施药精度低下,无法完成精准控制喷洒。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种植保无人机的智能定位及施药方法、系统及介质。
2、为达上述目的,本发明采用的技术方案为:
3、本发明第一方面提供了一种植保无人机的智能定位及施药方法,包括以下步骤:
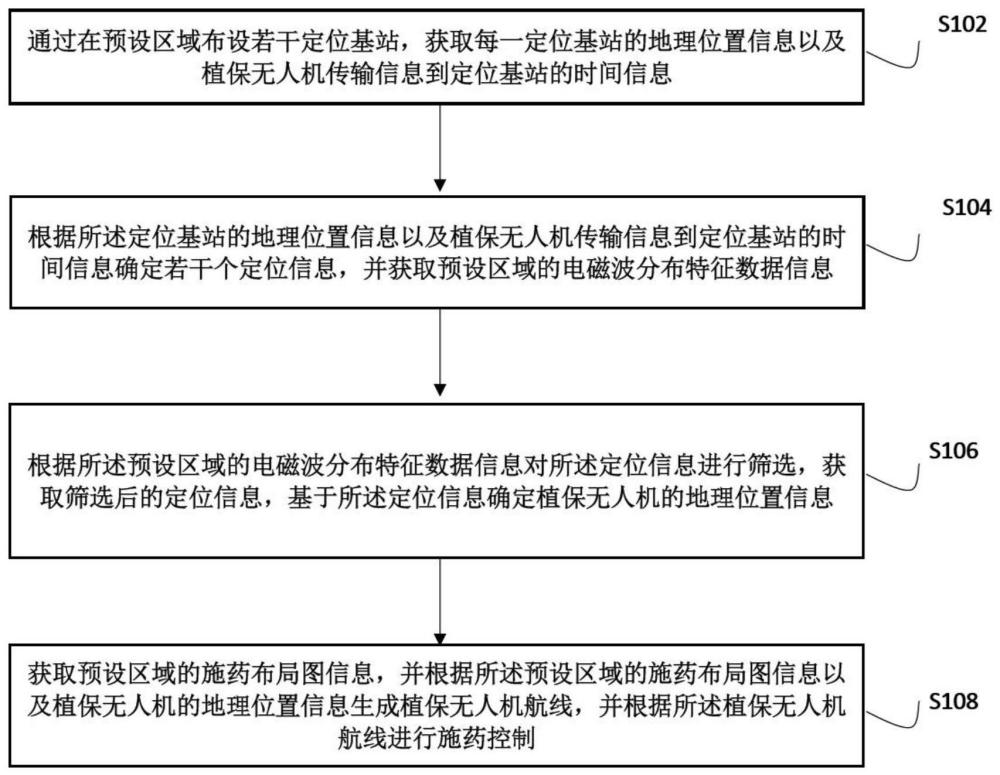
4、通过在预设区域布设若干定位基站,获取每一定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息;
5、根据所述定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息确定若干个定位信息,并获取预设区域的电磁波分布特征数据信息;
6、根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,获取筛选后的定位信息,基于所述定位信息确定植保无人机的地理位置信息;
7、获取预设区域的施药布局图信息,并根据所述预设区域的施药布局图信息以及植保无人机的地理位置信息生成植保无人机航线,并根据所述植保无人机航线进行施药控制。
8、进一步的,在本方法中,通过在预设区域布设若干定位基站,具体包括:
9、获取在预设区域施药的植保无人机预估数量信息,并获取单位数量的植保无人机占用的网络负载信息,根据所述在预设区域施药的植保无人机预估数量信息以及单位数量的植保无人机占用的网络负载信息计算出总网络负载信息;
10、通过大数据获取各数量的发送基站以及接收基站组合的网络负载信息,并初始化发送基站以及接收基站组合的数量信息,生成初始发送基站以及接收基站组合的数量信息;
11、根据所述初始发送基站以及接收基站组合的数量信息以及各数量的发送基站以及接收基站组合的网络负载信息生成初始发送基站以及接收基站组合的数量信息对应的网络负载信息;
12、当所述初始发送基站以及接收基站组合的数量信息对应的网络负载信息高于总网络负载信息时,调整发送基站以及接收基站组合的数量信息,直至所述初始发送基站以及接收基站组合的数量信息对应的网络负载信息不高于总网络负载信息,输出发送基站以及接收基站组合的数量信息,并在在预设区域布设定位基站。
13、进一步的,在本方法中,根据所述定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息确定若干个定位信息,具体包括:
14、获取电磁波在当前空气环境中的传播速度信息,并根据所述电磁波在当前空气环境中的传播速度信息以及植保无人机传输信息到定位基站的时间信息计算出若干个欧式距离值;
15、根据所述欧式距离值以及所述定位基站的地理位置信息计算出若干个定位信息,并统计所述定位信息,将相同的定位信息进行合并,生成一个或者多个定位信息,并将所述定位信息输出。
16、进一步的,在本方法中,根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,获取筛选后的定位信息,基于所述定位信息确定植保无人机的地理位置信息,具体包括:
17、通过大数据获取各电磁波类型对植保无人机定位的干扰特性数据信息,并构建数据库,将所述各电磁波类型对植保无人机定位的干扰特性数据信息输入到所述数据库中存储;
18、将所述预设区域的电磁波分布特征数据信息输入到所述数据库中进行数据匹配,获取预设区域中每个子区域对植保无人机定位的干扰特性数据信息;
19、判断所述子区域对植保无人机定位的干扰特性数据信息是否预设类型的干扰特性数据信息,当所述干扰特性数据信息为预设类型的干扰特性数据信息时,则获取受到预设类型的干扰特性数据信息的定位信息;
20、将所述受到预设类型的干扰特性数据信息的定位信息作为异常的定位信息,将并将所述异常的定位信息剔除,并将没有受到预设类型的干扰特性数据信息作为最终的定位信息进行输出。
21、进一步的,在本方法中,获取预设区域的施药布局图信息,并根据所述预设区域的施药布局图信息以及植保无人机的地理位置信息生成植保无人机航线,具体包括:
22、获取预设区域的施药布局图信息,并根据所述预设区域的施药布局图信息获取随机一个待施药区域的地理位置信息以及待施药面积信息;
23、将所述待施药区域的地理位置信息作为起点,引入蚁群算法,将所述起点以及待施药面积信息输入到所述蚁群算法中,规划出若干条植保无人机航信,并获取每一条植保无人机航信能耗值;
24、根据所述植保无人机航线能耗值进行排序,获取植保无人机航线能耗值排序结果,从所述植保无人机航线能耗值排序结果中选取出能耗值最小的植保无人机航线;
25、将所述能耗值最小的植保无人机航线作为最终的无人机航线,并将所述最终的无人机航线输出。
26、进一步的,在本方法中,根据所述植保无人机航线进行施药控制,具体包括以下步骤:
27、获取施药区域的实时环境参数信息,并将所述施药区域的实时环境参数信息与预设环境参数进行对比,得到偏差率,判断所述偏差率是否大于预设偏差率阈值;
28、当所述偏差率大于预设偏差率阈值时,根据所述施药区域的实时环境参数信息以及预设环境参数计算出参数偏差值,并根据所述参数偏差值计算出雾滴偏移参数;
29、获取实时的雾滴工作参数信息,并根据所述雾滴偏移参数以及实时的雾滴工作参数信息对植保无人机进行喷洒力、喷洒方向、喷头速度进行智能控制。
30、本发明第二方面提供了一种植保无人机的智能定位及施药系统,所述植保无人机的智能定位及施药系统包括存储器以及处理器,所述存储器中包括植保无人机的智能定位及施药方法程序,所述植保无人机的智能定位及施药方法程序被处理器执行时,实现如下步骤:
31、通过在预设区域布设若干定位基站,获取每一定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息;
32、根据所述定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息确定若干个定位信息,并获取预设区域的电磁波分布特征数据信息;
33、根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,获取筛选后的定位信息,基于所述定位信息确定植保无人机的地理位置信息;
34、获取预设区域的施药布局图信息,并根据所述预设区域的施药布局图信息以及植保无人机的地理位置信息生成植保无人机航线,并根据所述植保无人机航线进行施药控制。
35、进一步的,在本系统中,通过在预设区域布设若干定位基站,具体包括:
36、获取在预设区域施药的植保无人机预估数量信息,并获取单位数量的植保无人机占用的网络负载信息,根据所述在预设区域施药的植保无人机预估数量信息以及单位数量的植保无人机占用的网络负载信息计算出总网络负载信息;
37、通过大数据获取各数量的发送基站以及接收基站组合的网络负载信息,并初始化发送基站以及接收基站组合的数量信息,生成初始发送基站以及接收基站组合的数量信息;
38、根据所述初始发送基站以及接收基站组合的数量信息以及各数量的发送基站以及接收基站组合的网络负载信息生成初始发送基站以及接收基站组合的数量信息对应的网络负载信息;
39、当所述初始发送基站以及接收基站组合的数量信息对应的网络负载信息高于总网络负载信息时,调整发送基站以及接收基站组合的数量信息,直至所述初始发送基站以及接收基站组合的数量信息对应的网络负载信息不高于总网络负载信息,输出发送基站以及接收基站组合的数量信息,并在在预设区域布设定位基站。
40、进一步的,在本系统中,根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,获取筛选后的定位信息,基于所述定位信息确定植保无人机的地理位置信息,具体包括:
41、通过大数据获取各电磁波类型对植保无人机定位的干扰特性数据信息,并构建数据库,将所述各电磁波类型对植保无人机定位的干扰特性数据信息输入到所述数据库中存储;
42、将所述预设区域的电磁波分布特征数据信息输入到所述数据库中进行数据匹配,获取预设区域中每个子区域对植保无人机定位的干扰特性数据信息;
43、判断所述子区域对植保无人机定位的干扰特性数据信息是否预设类型的干扰特性数据信息,当所述干扰特性数据信息为预设类型的干扰特性数据信息时,则获取受到预设类型的干扰特性数据信息的定位信息;
44、将所述受到预设类型的干扰特性数据信息的定位信息作为异常的定位信息,将并将所述异常的定位信息剔除,并将没有受到预设类型的干扰特性数据信息作为最终的定位信息进行输出。
45、进一步的,在本系统中,根据所述植保无人机航线进行施药控制,具体包括以下步骤:
46、获取施药区域的实时环境参数信息,并将所述施药区域的实时环境参数信息与预设环境参数进行对比,得到偏差率,判断所述偏差率是否大于预设偏差率阈值;
47、当所述偏差率大于预设偏差率阈值时,根据所述施药区域的实时环境参数信息以及预设环境参数计算出参数偏差值,并根据所述参数偏差值计算出雾滴偏移参数;
48、获取实时的雾滴工作参数信息,并根据所述雾滴偏移参数以及实时的雾滴工作参数信息对植保无人机进行喷洒力、喷洒方向、喷头速度进行智能控制。
49、本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
50、本发明通过在预设区域布设若干定位基站,获取每一定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信,进而根据所述定位基站的地理位置信息以及植保无人机传输信息到定位基站的时间信息确定若干个定位信息,并获取预设区域的电磁波分布特征数据信息,从而根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,获取筛选后的定位信息,基于所述定位信息确定植保无人机的地理位置信息,最后通过获取预设区域的施药布局图信息,并根据所述预设区域的施药布局图信息以及植保无人机的地理位置信息生成植保无人机航线,并根据所述植保无人机航线进行施药控制。本发明通过对预设区域的电磁波类型进行评估,从而根据所述预设区域的电磁波分布特征数据信息对所述定位信息进行筛选,进而剔除受到电磁波影响的定位信息,使得无人机的定位更加精确,从而提高植保无人机的施药精确性。
- 还没有人留言评论。精彩留言会获得点赞!