一种具有学习能力的采摘机械手和采摘方法
本发明属仿生采摘装备,具体涉及一种具有学习能力的采摘机械手和采摘方法
背景技术:
1、中国是小重要的生产国之一,直到目前为止,小的选择性收获作业都依靠人工完成,随着劳动力的减少和设施农业的升级,采摘作业由机器人代替成为了未来发展趋势。小全程机器人采摘发展过程中,果实损伤率高是目前制约采摘机器人产业化的关键因素,故解决采摘损伤问题是采摘机器人研发过程中的重点和难点问题。
2、造成采摘机器人采摘果实损伤的原因主要有以下几点:1.采摘机械手采摘姿态不合理,造成机械、茎枝条与果实的碰撞挤压损伤;2.腕关节姿态僵硬,灵活性差,与视觉系统协调配合能力不足;3.采摘手缺乏柔性吸附部件,与果实接触过于强硬。
技术实现思路
1、本发明的目的在于提供一种具有学习能力的采摘机械手和采摘方法,采摘机械手安装在采摘机器人上,能够在采摘行为开始之前学习人手采摘的动作,对于不同环境下的果实具有较强的适应性;采摘机械手安装茎秆扶持装置,摘果的同时可以扶住的茎秆;对于目前采摘机械手运动过于僵硬的缺陷,本发明基于仿生的概念,创新设计一种仿生象鼻腕关节组件,在气力的作用下能够多自由运动,安装角度测量传感器和距离测量传感器,运动行为更加精确;手指组件对采用仿生章鱼吸盘结构,能够更好的提供加持力,提高摘果的稳定性。
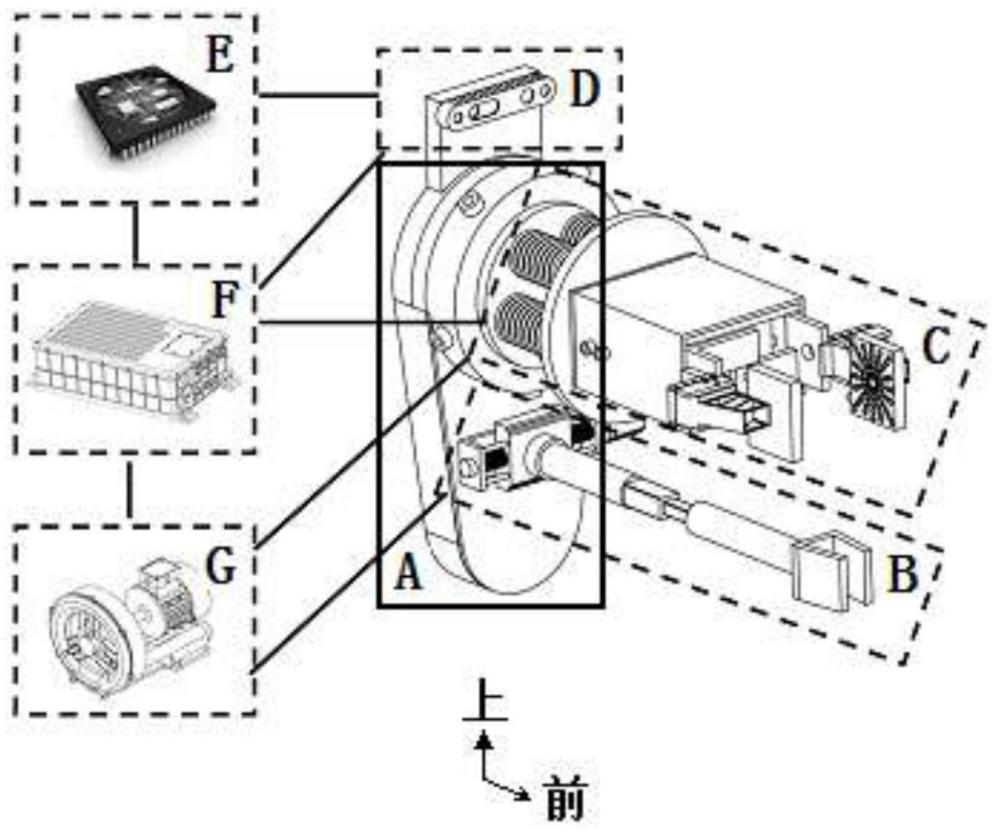
2、本发明的一种具有学习能力的采摘机械手,由安装座a、茎干扶持装置b、夹持装置c、视觉装置d、边缘学习模块e、控制柜f和气泵g组成,其中安装座a的罩壳1前板通过螺栓与茎干扶持装置b的滑轨14后板固接;安装座a的主动轮5通过传动轴与夹持装置c中腕关节组件c1的底座16活动连接;视觉装置d的深度相机41固接于安装座a的支撑板2上;边缘学习模块e与视觉装置d通信连接;控制柜f分别与安装座a、茎干扶持装置b、夹持装置c、视觉装置d、边缘学习模块e和气泵g通信连接;气泵g通过气管分别与茎干扶持装置b的气动推杆10、腕关节组件c1的接气孔组17和气道22、气动组件c2的气道孔对ⅱ36、手指组件对c3的夹板气道对42a连接。
3、所述的安装座a由罩壳1、支撑板2、轴承3、电机ⅰ4、主动轮5、同步带6和从动轮7组成,支撑板2固接于罩壳1的上端,电机ⅰ4固接于罩壳1;主动轮5、同步带6和从动轮7位于罩壳1内,主动轮5经同步带6与从动轮7传动连接;轴承3外圈固接于罩壳1的后板下部;电机ⅰ4固接于罩壳1的前板下部,电机ⅰ4的输出轴中部与主动轮5中心键连接,电机ⅰ4的输出轴后端与轴承3内圈过盈连接。
4、所述的茎干扶持装置b由手指8、杆ⅰ9、气动推杆10、杆ⅱ11、丝杠12、滑块13、滑轨14和电机ⅱ15组成,手指8、杆ⅰ9、气动推杆10、杆ⅱ11和滑块13自前至后顺序排列并固接;丝杠12中部与滑块13中心螺纹连接,丝杠12右端与滑轨14右板中心活动连接,丝杠12左端经滑轨14左板中心与电机ⅱ15的输出轴固接;滑块13与滑轨14滑动连接。
5、所述的夹持装置c由腕关节组件c1、气动组件c2和手指组件对c3组成,其中腕关节组件c1由底座16、接气孔组17、柔性伸缩组件c1a、连接座组18、连接头组19和前板20组成,其中柔性伸缩件组c1a由五个结构相同的柔性伸缩件组成,每个柔性伸缩件均由距离测量器21、气道22、空心板组23和角度测量器24组成,空心板组23由8-12个空心板组成,8-12个空心板前后排列,空心板呈圆盘型,气道22设于空心板组23的中心;距离测量器21固接于空心板组23的前端板前面;角度测量器24固接于空心板组23的后端板后面;气动组件c2由外壳25、连板ⅰ26、连板ⅱ27、左板32、杆对33、螺纹孔对ⅳ34,气缸35,气道孔对ⅱ36,右板37,螺纹孔对ⅴ38组成,外壳25为前敞口长方箱体,其上板设有螺纹孔对ⅰ28、右板设有气道孔对ⅰ29、后板设有螺纹孔对ⅱ30、下板设有螺纹孔对ⅲ31;气缸34的后面设有气道孔对ⅱ36,下板设置螺纹孔对ⅳ34,上板设置螺纹孔对ⅴ38,左板32、气缸35和右板37自右至左顺序排列,并经杆对33连接;连板ⅰ26由横板ⅰ26a和立板ⅰ26b呈t型固接而成;连板ⅰ26的立板ⅰ26b后端与气缸35的左板32前端固接;连板ⅱ27由横板ⅱ27a和立板ⅱ27b呈t型固接而成;连板ⅱ27的立板ⅱ27b后端与气缸35的右板37前端固接;气缸35的螺纹孔对ⅳ34和螺纹孔对ⅴ38通过螺栓与外壳25的螺纹孔对ⅰ28、螺纹孔对ⅱ30螺纹连接;手指组件对c3由右手指组件c3a和左手指组件c3b组成,右手指组件c3a和左手指组件c3b结构相同,方向相反,以右手指组件c3a为例,由下板39、侧板对40、支撑体41和夹板42组成,夹板42为长方体,夹板42下端固接夹板气道对42a,夹板42的内面设有吸盘组ⅰ42e的六个吸盘、吸盘组ⅱ42d的八个吸盘、吸盘组ⅲ42c的八个吸盘、吸盘组ⅳ42b的四个吸盘;且吸盘组ⅰ42e、吸盘组ⅱ42d、吸盘组ⅲ42c和吸盘组ⅳ42b以夹板40的中心向外,呈辐射状排列;下板39、支撑体41和夹板42自后至前顺序排列,下板39和支撑体41经侧板对40螺栓固接;下板39由立板ⅲ39a和横板ⅲ39b呈t型固接而成;夹板42右面与支撑体41左侧上部固接。
6、所述的视觉装置d由深度相机41和图像传输模块42组成,深度相机41和图像传输模块42通信连接。
7、所述的边缘学习模块e由高性能边缘计算处理器43、深度图像接收单元44和信号输出单元45组成,高性能边缘计算处理器43、深度图像接收单元44和信号输出单元45由线路连接。
8、所述夹板42内面的吸盘,以吸盘组ⅳ42b的吸盘为例,其内部轮廓线下端为原点,以吸盘的左侧指向为x轴,垂直x轴的方向为y轴,则曲线的方程为:
9、y1=0.7691-3.203x1+5.355x12
10、y2=0.4657+0.866x2-7.318x22
11、其中:x1取值分别为3.975-5.083mm、2.683-3.658mm、1.115-2.287mm、0.782-1.082时分别对应吸盘组ⅰ42e、吸盘组ⅱ42d、吸盘组ⅲ42c和吸盘组ⅳ42b;
12、x2取值分别为5.437-6.782mm、4.562-5.257mm、3.053mm-4.491mm、2.752-2.959时时分别对应吸盘组ⅰ42e、吸盘组ⅱ42d、吸盘组ⅲ42c和吸盘组ⅳ42b的尺寸
13、所述腕关节组件c1的底座16保持不动时,柔性伸缩件组c1a末端弯曲平面与初始平面的夹角为θ,柔性伸缩件组c1a弯曲时曲率半径r,柔性伸缩组件安装半径r,柔性伸缩组件的伸缩长度△l,绕z轴扭转角度为柔性伸缩组件初始长度l与工作长度lⅰ之间的关系为:
14、
15、li=θri
16、其中:角度的变化范围为-10°-10°,θ角度的变化范围为-50°—50°。
17、本发明的一种基于具有学习能力的采摘机械手的采摘方法,包括下列步骤:
18、1)对于非结构化环境的,视觉装置d采集技术人员采摘时的深度影像信息,通过关键点检测等深度学习方法,对人手关键运动特征进行采集处理,边缘学习模块e对人手关键运动特征进行解析,分析人手的拉、扭、弯、拽等组合行为方式,并进行保存;
19、2)视觉装置d采集目标果实图像信息,边缘学习模块e搭载轻量级神经网络,可以迅速实现对采摘对象识别,并自动计算采摘目标与深度相机之间的位置,得到采摘目标与手臂之间的相对位置关系;
20、3)边缘学习模块e将解析视觉装置d采集技术人员采摘时的深度影像信息,将解析后的行为方式数据传输至控制柜f并驱动夹持装置c、茎干扶持装置b和气泵g完成指定采摘行为;
21、4)气泵g在控制柜f的信号后,通过改变气流控制夹持装置c、茎干扶持装置b的运动。
22、本发明的有益效果在于仿象鼻腕关节组件的驱动下,采摘机械手的运动更加自如,可以采用多种不同的行为方式完成采摘作业,适应于更加复杂的非结构环境;仿生章鱼理念设计下的手指,吸附力更强,能够更好的将果实抓牢;具备学习能力,在采摘行为开始前能够学习人手采摘的动作,更加效率的完成采摘作业。
- 还没有人留言评论。精彩留言会获得点赞!