一种基于肥力条件的花生播施控制方法、系统及装置
本发明涉及花生种植,特别是涉及一种基于肥力条件的花生播施控制方法、系统及装置。
背景技术:
1、目前花生机械化播种水平较高,但智能化水平偏低,已成为制约花生机械化高效发展的重要阻碍,提升花生播种过程智能化水平迫在眉睫。
2、种肥变量播施可有效提升种子及肥料利用率,按需控制播种施肥量,减少用种量以及因过量施肥导致的环境面源污染问题。
3、现有的花生播种机没有配套成型的种-肥变量播施装置,同时没有基于肥力条件的智能花生种-肥变量播施集成控制系统的研究,仍以传统的纯机械式传动带动排种、排肥装置实现种肥的播施,种肥播施量难以精量控制,且无法精准掌握田间播施数据,不利于花生产业的优化提升改进。
技术实现思路
1、本发明的目的是提供一种基于肥力条件的花生播施控制方法、系统及装置,以实现按需控制播种施肥量,提升种子及肥料利用率。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供一种基于肥力条件的花生播施控制方法,所述控制方法包括如下步骤:
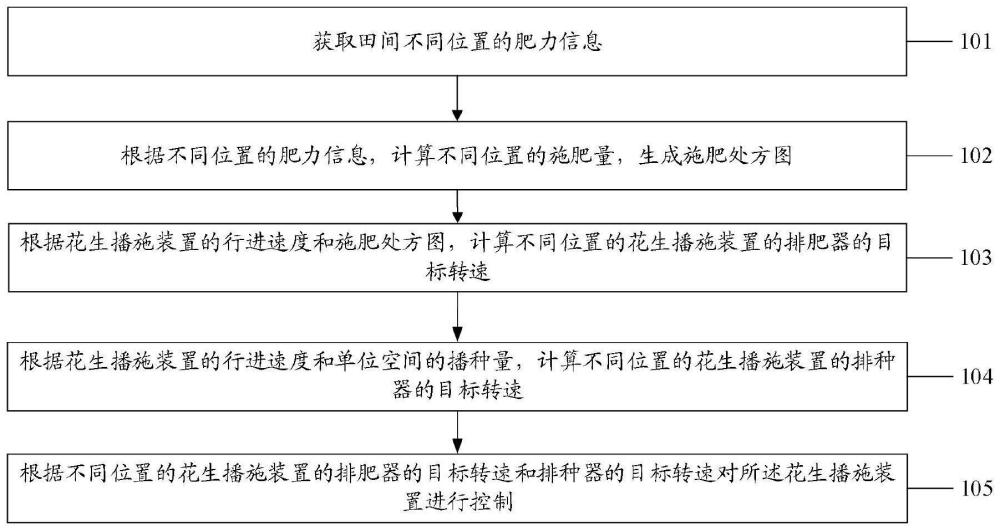
4、获取田间不同位置的肥力信息;
5、根据不同位置的肥力信息,计算不同位置的施肥量,生成施肥处方图;
6、根据花生播施装置的行进速度和施肥处方图,计算不同位置的花生播施装置的排肥器的目标转速;
7、根据花生播施装置的行进速度和单位空间的播种量,计算不同位置的花生播施装置的排种器的目标转速;所述单位空间与所述施肥处方图中的分辨率表征的范围一致;
8、根据不同位置的花生播施装置的排肥器的目标转速和排种器的目标转速对所述花生播施装置进行控制。
9、可选的,所述施肥量的计算方式为:
10、l肥=(m花/100×k-m0×0.16)÷(α×β);
11、其中,l肥为施肥量,m花为田间花生的目标产量,k为单位产量的花生的所需养分,m0为检测得到的肥力信息,α为肥料利用率,β为肥料养分含量。
12、可选的,计算不同位置的花生播施装置的排肥器的目标转速的公式为:
13、
14、其中,n肥为排肥器的目标转速,v肥为施肥速率,k肥为排肥器转速与排肥速率的转换系数,l肥为施肥量,v前为花生播施装置的行进速度。
15、可选的,计算不同位置的花生播施装置的排种器的目标转速的公式为:
16、
17、其中,n种为排种器的目标转速,v种为播种速率,k种为排种器转速与播种速率的转换系数,l种为单位空间的播种量,v前为花生播施装置的行进速度。
18、一种基于肥力条件的花生播施控制系统,所述控制系统应用于上述的控制方法,所述控制系统包括:
19、肥力信息获取模块,用于获取田间不同位置的肥力信息;
20、施肥处方图生成模块,用于根据不同位置的肥力信息,计算不同位置的施肥量,生成施肥处方图;
21、第一转速计算模块,用于根据花生播施装置的行进速度和施肥处方图,计算不同位置的花生播施装置的排肥器的目标转速;
22、第二转速计算模块,用于根据花生播施装置的行进速度和单位空间的播种量,计算不同位置的花生播施装置的排种器的目标转速;所述单位空间与所述施肥处方图中的分辨率表征的范围一致;
23、控制模块,用于根据不同位置的花生播施装置的排肥器的目标转速和排种器的目标转速对所述花生播施装置进行控制。
24、一种基于肥力条件的花生播施控制装置,所述控制装置包括:肥力信息采集模块、定位模块和控制终端;
25、所述肥力信息采集模块和所述定位模块均与所述控制终端连接;
26、所述肥力信息采集模块用于采集田间不同位置的肥力信息,并将田间不同位置的肥力信息发送给所述控制终端;
27、所述定位模块用于实时确定花生播施装置的位置信息,并将所述位置信息发送给所述控制终端;
28、所述控制终端与花生播施装置的排肥器的控制端和排种器的控制端连接,所述控制终端用于根据田间不同位置的肥力信息,采用上述的控制方法,确定不同位置的花生播施装置的排肥器的目标转速和排种器的目标转速,并根据位置信息和不同位置的排肥器的目标转速对排肥器的转速进行控制,根据位置信息和不同位置的排种器的目标转速对排种器的转速进行控制。
29、可选的,所述控制装置还包括测速传感器;
30、所述测速传感器设置在排肥器的主轴上;
31、所述测速传感器与所述控制终端连接,所述测速传感器用于检测当前位置的排肥器的转速信息;
32、在根据位置信息和不同位置的排肥器的目标转速对排肥器的转速进行控制方面,所述控制终端具体用于:
33、根据所述位置信息和不同位置的排肥器的目标转速,确定当前位置的排肥器的目标转速,根据当前位置的排肥器的目标转速和当前位置的排肥器的转速信息对排肥器的转速进行闭环控制。
34、可选的,所述控制装置还包括排肥检测单元和排种检测单元;
35、所述排肥检测单元设置在花生播施装置的排肥箱的出口;所述排肥检测单元与所述控制终端连接,所述排肥检测单元用于检测当前位置的排肥速率信息;
36、所述排种检测单元设置在花生播施装置的排种箱的出口;所述排种检测单元与所述控制终端连接,所述排种检测单元用于检测当前位置的排种速率信息;
37、所述控制终端还用于根据当前位置的排肥速率信息和当前位置的排肥器的转速信息,对排肥器转速与排肥速率的转换系数进行修正,根据当前位置的排种速率信息和当前位置的排种器的目标转速对排种器转速与排种速率的转换系数进行修正。
38、可选的,所述排种检测单元包括:光源、硅光电池和第一电信号采集电路;
39、所述光源和所述硅光电池分别设置于所述排种箱的出口的两侧,所述硅光电池与所述第一电信号采集电路连接,所述第一电信号采集电路与所述控制终端连接。
40、可选的,所述排肥检测单元包括:第一极板、第二极板、接地电阻和第二电信号采集电路;
41、所述第一极板和所述第二极板分别设置于排肥箱的出口的两侧;
42、所述第一极板连接直流电源,所述第二极板分别与接地电阻的一端和所述第二电信号采集电路连接,所述第二电信号采集电路与所述控制终端连接。
43、根据本发明提供的具体实施例,本发明公开了以下技术效果:
44、本实施例提供一种基于肥力条件的花生播施控制方法、系统及装置,所述控制方法包括如下步骤:获取田间不同位置的肥力信息;根据不同位置的肥力信息,计算不同位置的施肥量,生成施肥处方图;根据花生播施装置的行进速度和施肥处方图,计算不同位置的花生播施装置的排肥器的目标转速;根据花生播施装置的行进速度和单位空间的播种量,计算不同位置的花生播施装置的排种器的目标转速;所述单位空间与所述施肥处方图中的分辨率表征的范围一致;根据不同位置的花生播施装置的排肥器的目标转速和排种器的目标转速对所述花生播施装置进行控制。本实施例基于田间的肥力信息实现不同位置施肥量的计算,并进一步的结合花生播施装置行进速度确定排肥器的目标转速,并对其进行控制,基于花生播施装置的行进速度和单位空间的播种量确定排种器的目标转速,并对其进行控制,实现了按需控制播种施肥量,提升种子及肥料利用率。
- 还没有人留言评论。精彩留言会获得点赞!