割草机器人的制作方法
本申请属于割草机器人,更具体地说,是涉及一种割草机器人。
背景技术:
1、割草机器人是一种可以自动执行割草任务的机器人,通常使用电池作为动力源,配备有传感器、计算机视觉系统和自主导航技术,能够在草坪上自主移动并进行割草作业,割草机器人能够有效的减少人工劳动力的需求,并且更加环保和节能,目前割草机器人的发展已经取得了很大的进展,未来还将不断完善和提高其性能和功能,以满足不同用户的需求。
2、但是,现有的割草机器人在进行自动割草时,如果遇到较大的凹坑,则有可能会出现前轮悬空的现象,当割草机器人的前轮悬空时,割草机器人便无法继续前进,此时需要用户手动对割草机器人的状态进行调整,以避免割草机器人的后轮在无法前进的情况下进行动力输出,使用体验较差。
技术实现思路
1、本申请实施例的目的在于提供一种割草机器人,旨在解决现有技术中的割草机器人在出现前轮悬空的现象时,需手动对割草机器人的状态进行调整,使用体验较差的技术问题。
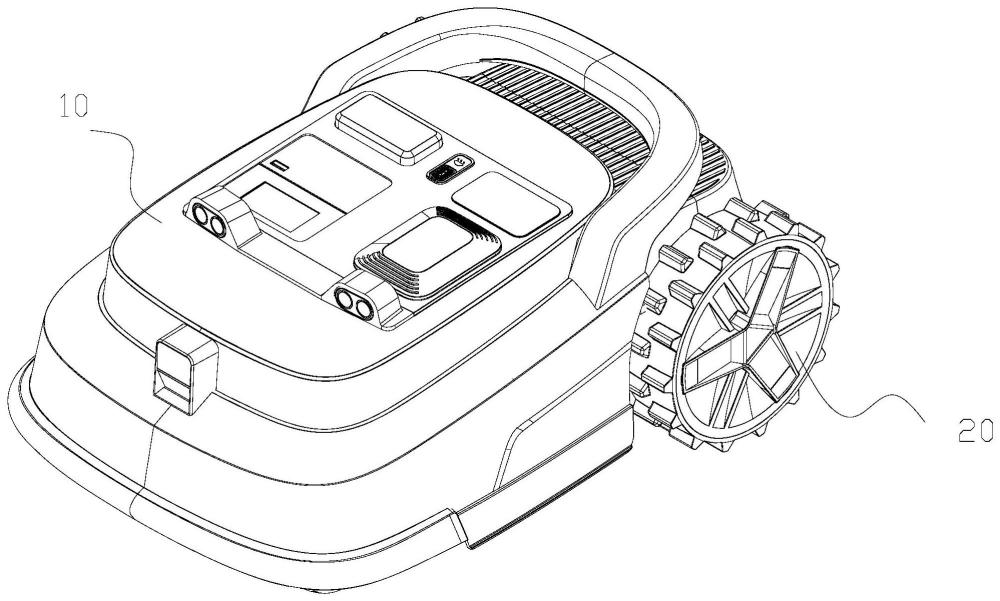
2、为实现上述目的,根据本申请的一个方面,提供了一种割草机器人,割草机器人包括:主体、主动轮部、从动轮部及检测部,主体内设置有容纳腔;主动轮部设置在主体上;从动轮部包括从动轮组件及磁铁组件,从动轮组件沿第一方向可移动的安装在主体的远离容纳腔的一侧上,磁铁组件设置在从动轮组件上;检测部包括霍尔检测组件,霍尔检测组件设置在容纳腔内,并与主动轮部电连接,霍尔检测组件的位置与磁铁组件的位置相对应,用于对磁铁组件的位置进行检测;从动轮组件具有使磁铁组件与霍尔检测组件之间的距离大于预设数值的悬空状态,在从动轮组件处于悬空状态的情况下,霍尔检测组件能够输出第一预设信号。
3、可选地,从动轮组件具有使磁铁组件与霍尔检测组件之间的距离小于等于预设数值的工作状态,在从动轮组件处于工作状态的情况下,霍尔检测组件能够输出第二预设信号。
4、可选地,从动轮组件包括第一输出轴及第一轮体,第一输出轴的第一端沿第一方向可移动的安装在主体上,第一输出轴的第二端沿第二方向延伸,第一轮体可转动的安装在第一输出轴的第二端上。
5、可选地,主体的远离容纳腔的一侧上设置有第一安装凹部,第一安装凹部与外部环境连通,并沿第一方向延伸,从动轮组件还包括轴套组件,轴套组件沿第一方向可移动的穿设在第一安装凹部内,第一输出轴的第一端沿第一方向延伸,并可转动的安装在轴套组件上。
6、可选地,从动轮组件还包括限位挡板组件,限位挡板组件盖设在第一安装凹部上,限位挡板组件与第一安装凹部之间形成有安装空间,轴套组件位于安装空间内。
7、可选地,轴套组件包括轴套本体,轴套本体上设置有第一安装孔,第一安装孔沿第一方向延伸,第一输出轴的第一端可转动的穿设在第一安装孔内。
8、可选地,轴套本体的外侧壁上设置有多个限位凸起,多个限位凸起沿轴套本体的周向间隔设置,并与第一安装凹部的内侧壁抵接。
9、可选地,轴套组件还包括第一轴承,第一轴承设置在第一安装孔内,第一轴承的外圈与第一安装孔的内壁抵接,第一轴承的内圈与第一输出轴的第一端的外侧壁抵接。
10、可选地,割草机器人还包括控制部,控制部设置在容纳腔内,并与霍尔检测组件电连接,用于接收霍尔检测组件发出的信号。
11、可选地,主动轮部包括主动轮组件及驱动组件,驱动组件设置在容纳腔内,并与控制部电连接,主动轮组件与驱动组件驱动连接,控制部能够通过驱动组件对主动轮组件的运动进行控制。
12、本申请提供的割草机器人的有益效果在于:与现有技术相比,本申请所提供的割草机器人通过将设置有磁铁组件的从动轮组件,沿第一方向可移动的安装在主体的远离容纳腔的一侧上,并在容纳腔内设置霍尔检测组件,同时使霍尔检测组件的位置与磁铁组件的位置相对应,使本申请所提供的割草机器人能够通过霍尔检测组件与磁铁组件的配合,间接的从动轮组件的状态进行检测,与此同时,通过将霍尔检测组件设置为能够在从动轮组件处于悬空状态的情况下输出第一预设信号,使本申请所提供的割草机器人能够在从动轮组件陷入凹坑内,并处于悬空状态的情况下,通过第一预设信号对主动轮部的状态进行控制,以避免主动轮部在从动轮组件悬空的情况下任然进行动力输出,相比于现有技术中的割草机器人,本申请所提供的割草机器人无需人工手动对割草机器人的状态进行调整,提高了用户的使用体验。
技术特征:
1.一种割草机器人,其特征在于,所述割草机器人包括:
2.根据权利要求1所述的割草机器人,其特征在于,所述从动轮组件(31)具有使所述磁铁组件(32)与所述霍尔检测组件(41)之间的距离小于等于预设数值的工作状态,在所述从动轮组件(31)处于所述工作状态的情况下,所述霍尔检测组件(41)能够输出第二预设信号。
3.根据权利要求2所述的割草机器人,其特征在于,所述从动轮组件(31)包括第一输出轴(311)及第一轮体(312),所述第一输出轴(311)的第一端沿第一方向可移动的安装在所述主体(10)上,所述第一输出轴(311)的第二端沿第二方向延伸,所述第一轮体(312)可转动的安装在所述第一输出轴(311)的第二端上。
4.根据权利要求3所述的割草机器人,其特征在于,所述主体(10)的远离所述容纳腔的一侧上设置有第一安装凹部(11),所述第一安装凹部(11)与外部环境连通,并沿第一方向延伸,所述从动轮组件(31)还包括轴套组件(313),所述轴套组件(313)沿所述第一方向可移动的穿设在所述第一安装凹部(11)内,所述第一输出轴(311)的第一端沿所述第一方向延伸,并可转动的安装在所述轴套组件(313)上。
5.根据权利要求4所述的割草机器人,其特征在于,所述从动轮组件(31)还包括限位挡板组件(314),所述限位挡板组件(314)盖设在所述第一安装凹部(11)上,所述限位挡板组件(314)与所述第一安装凹部(11)之间形成有安装空间,所述轴套组件(313)位于所述安装空间内。
6.根据权利要求5所述的割草机器人,其特征在于,所述轴套组件(313)包括轴套本体(3131),所述轴套本体(3131)上设置有第一安装孔,所述第一安装孔沿第一方向延伸,所述第一输出轴(311)的第一端可转动的穿设在所述第一安装孔内。
7.根据权利要求6所述的割草机器人,其特征在于,所述轴套本体(3131)的外侧壁上设置有多个限位凸起(3132),多个所述限位凸起(3132)沿所述轴套本体(3131)的周向间隔设置,并与所述第一安装凹部(11)的内侧壁抵接。
8.根据权利要求5所述的割草机器人,其特征在于,所述轴套组件(313)还包括第一轴承,所述第一轴承设置在所述第一安装孔内,所述第一轴承的外圈与所述第一安装孔的内壁抵接,所述第一轴承的内圈与所述第一输出轴(311)的第一端的外侧壁抵接。
9.根据权利要求2至8中任意一项所述的割草机器人,其特征在于,所述割草机器人还包括控制部,所述控制部设置在所述容纳腔内,并与所述霍尔检测组件(41)电连接,用于接收所述霍尔检测组件(41)发出的信号。
10.根据权利要求9所述的割草机器人,其特征在于,所述主动轮部(20)包括主动轮组件(21)及驱动组件(22),所述驱动组件(22)设置在所述容纳腔内,并与所述控制部电连接,所述主动轮组件(21)与所述驱动组件(22)驱动连接,所述控制部能够通过所述驱动组件(22)对所述主动轮组件(21)的运动进行控制。
技术总结
本申请适用于割草机器人技术领域,提供了一种割草机器人,割草机器人包括:主体、主动轮部、从动轮部及检测部,主体内设置有容纳腔;从动轮部包括从动轮组件及磁铁组件,从动轮组件沿第一方向可移动的安装在主体的远离容纳腔的一侧上,磁铁组件设置在从动轮组件上;检测部包括霍尔检测组件,霍尔检测组件设置在容纳腔内,霍尔检测组件的位置与磁铁组件的位置相对应,用于对磁铁组件的位置进行检测;从动轮组件具有使磁铁组件与霍尔检测组件之间的距离大于预设数值的悬空状态,在从动轮组件处于悬空状态的情况下,霍尔检测组件能够输出第一预设信号。本申请所提供的割草机器人无需人工手动对割草机器人的状态进行调整,提高了用户的使用体验。
技术研发人员:钱阳明
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!