一种自动种苗机
本发明涉及农业机械,更具体的说是涉及一种自动种苗机。
背景技术:
1、随着农业现代化进程的加快以及农业机械化、自动化和信息化技术的不断发展,农业生产对效率、质量和可持续发展的要求越来越高,对传统的种苗方式进行改进成为农业现代化的必然要求。
2、目前的农业种植无法实现全自动种苗,往往需要人工进行辅助,仍然存在劳动力成本高,人工劳动强度大,种苗效率低的技术问题。
3、因此,提出一种自动种苗机,实现智能化种苗,提高种苗效率,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种自动种苗机,实现全自动化种苗,提高种苗效率。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种自动种苗机,包括:种苗承载装置、抓取装置、支撑架、犁地伸缩装置以及行走装置;
4、所述种苗承载装置和所述抓取装置安装于所述支撑架上,所述犁地伸缩装置置于所述支撑架与所述行走装置之间;
5、所述支撑架上设置有控制板和放苗口,所述控制板用于控制所述抓取装置、所述犁地伸缩装置以及所述行走装置动作。
6、优选的,所述抓取装置包括机械臂和机械爪,所述机械臂与所述机械爪之间通过关节连接,所述机械臂通过可旋转底盘与所述支撑架连接;
7、所述机械臂包括第一支撑臂、第二传动臂、第三传动臂,所述第一支撑臂一端与所述可旋转底盘固定连接,所述第一支撑臂另一端通过第二电机连接所述第二传动臂,所述第二传动臂另一端通过第三电机与所述第三传动臂连接,所述第三传动臂另一端通过第四电机与所述关节连接;
8、所述机械爪本体承载部底部两侧设置有超声波传感器、设置在所述机械爪本体档板下部两侧的压力传感器以及设置在所述机械爪本体前端的摄像头;
9、所述控制板根据所述摄像头采集的图像信息、所述超声波传感器采集的距离信号和所述压力传感器的压力信号控制所述第二电机、所述第三电机和所述第四电机转动抓取所述种苗承载装置上的种苗。
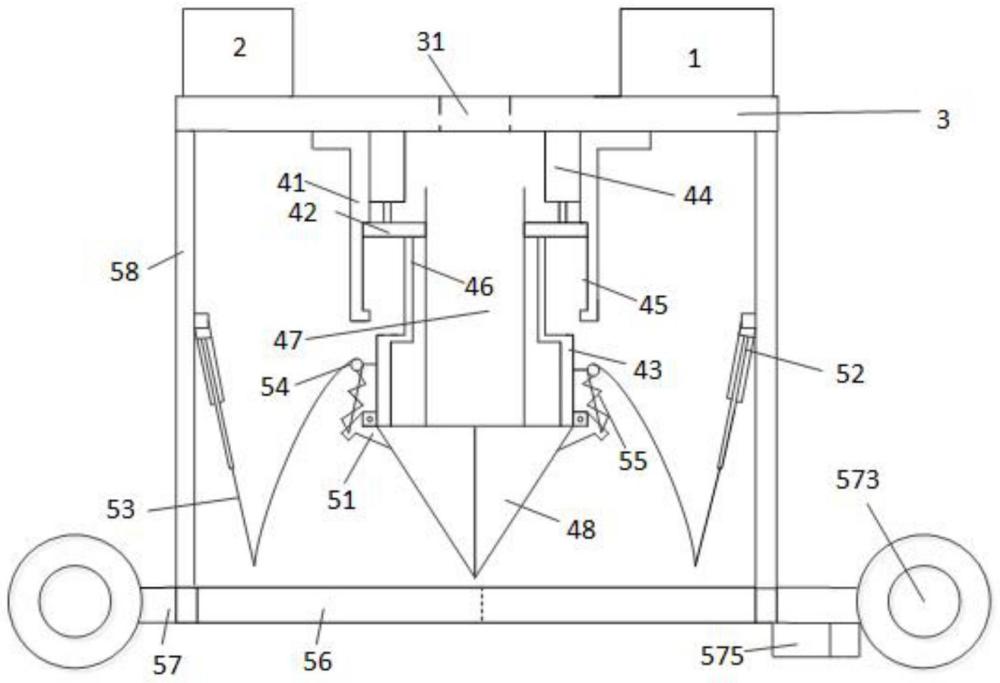
10、优选的,所述犁地伸缩装置关于所述放苗口中心所在轴线对称;正对所述放苗口下方设置套筒;
11、所述犁地伸缩装置包括固定柱、滑动杆和钻头,所述固定柱设置在所述放苗口两端,所述固定柱内侧上端设置有气缸,所述固定柱顶部与所述气缸均与所述支撑架底部紧贴,所述固定柱内侧下端设置滑槽;
12、所述滑动杆包括浮动板和支撑柱,所述浮动板与所述支撑柱之间通过内杆连接,所述浮动板一端安装于所述滑槽中,所述浮动板另一端与所述套筒固连,所述支撑柱与钻头顶部的两端相连;
13、所述控制板控制所述气缸推动所述浮动板向下滑动,所述浮动板带动所述支撑柱使所述钻头下移。
14、优选的,所述犁地伸缩装置置于所述行走装置内,所述支撑柱两端通过活动组件与所述钻头连接,所述行走装置的两侧内部安装有拉力机构,所述拉力机构通过所述牵引绳连接到所述活动组件上,所述牵引绳绕过位于所述支撑柱上的支点,所述活动组件与所述支点间的牵引绳被弹簧缠绕。
15、优选的,所述行走装置底部的底板包括活页部分和固定部分,所述活页部分与所述行走装置的两侧挡板底部铰接,所述固定部分置于所述活页部分两侧,所述固定部分安装有电机驱动器、第一电机和车轮,每个所述电机驱动器驱动一个所述第一电机,每个所述第一电机控制一个所述车轮。
16、优选的,所述底板上还安装有导航装置,所述导航装置与所述控制板相连,所述控制板根据所述导航装置的位置信号控制所述电机驱动器驱动所述第一电机,以驱动所述车轮运动。
17、优选的,所述固定部分底部安装有合沟铲。
18、经由上述的技术方案可知,本发明公开提供了一种自动种苗机,与现有技术相比具有以下有益效果:
19、1.可根据导航装置的位置信号控制多个第一电机的转动,进而控制车轮的转动,以控制自动种苗机整体的运动轨迹,并可根据摄像头、超声波传感器以及压力传感器采集的信号控制第二电机、第三电机和第四电机的转动,以精确控制机械臂单元中第二传动臂与第三传动臂的方向,进而精确控制机械爪的运动,从而实现对种苗的精确定位,进而实现种苗的精确抓取与放置,该抓取装置具有很高的自由度,适于任何轨迹或角度的工作,而且,可以自由编程,错误率可控,操作非常方便,并可实现种苗的快速抓取。
20、2.通过犁地伸缩装置以及合沟铲的设置可完成挖坑、播种和覆土的操作,实现全自动化种苗,提高种苗效率。
技术特征:
1.一种自动种苗机,其特征在于,包括:种苗承载装置(1)、抓取装置(2)、支撑架(3)、犁地伸缩装置以及行走装置;
2.根据权利要求1所述的一种自动种苗机,其特征在于,所述抓取装置(2)包括机械臂和机械爪(28),所述机械臂与所述机械爪(28)之间通过关节(27)连接,所述机械臂通过可旋转底盘(21)与所述支撑架(3)连接;
3.根据权利要求1所述的一种自动种苗机,其特征在于,所述犁地伸缩装置关于所述放苗口(31)中心所在轴线对称;正对所述放苗口(31)下方设置套筒(47);
4.根据权利要求3所述的一种自动种苗机,其特征在于,所述犁地伸缩装置置于所述行走装置内,所述支撑柱(43)两端通过活动组件(51)与所述钻头(48)连接,所述行走装置的两侧内部安装有拉力机构(52),所述拉力机构(52)通过牵引绳(53)连接到所述活动组件(51)上,所述牵引绳(53)绕过位于所述支撑柱(43)上的支点(54),所述活动组件(51)与所述支点(54)间的牵引绳被弹簧(55)缠绕。
5.根据权利要求4所述的一种自动种苗机,其特征在于,所述行走装置底部的底板包括活页部分(56)和固定部分(57),所述活页部分(56)与所述行走装置的两侧挡板(58)底部铰接,所述固定部分(57)置于所述活页部分(56)两侧,所述固定部分(57)安装有电机驱动器(571)、第一电机(572)和车轮(573),每个所述电机驱动器(571)驱动一个所述第一电机(572),每个所述第一电机(572)控制一个所述车轮(573)。
6.根据权利要求5所述的一种自动种苗机,其特征在于,所述底板上还安装有导航装置,所述导航装置与所述控制板(35)相连,所述控制板(35)根据所述导航装置的位置信号控制所述电机驱动器(571)驱动所述第一电机(572),以驱动所述车轮(573)运动。
7.根据权利要求5所述的一种自动种苗机,其特征在于,所述固定部分(57)底部安装有合沟铲(575)。
技术总结
本发明公开了一种自动种苗机,属于农业机械技术领域。本发明根据导航装置的位置信号控制第一电机的转动,进而控制车轮的转动,以控制自动种苗机整体的运动,并根据摄像头、超声波传感器以及压力传感器采集的信号控制第二电机、第三电机和第四电机的转动,以精确控制机械臂单元中第二传动臂与第三传动臂的方向,进而精确控制机械爪的运动,从而实现对种苗的精确定位,进而实现种苗的精确抓取与放置,该抓取装置具有很高的自由度,适于任何轨迹或角度的工作,而且,可以自由编程,错误率可控,操作方便,可实现种苗的快速抓取;同时通过改进犁地伸缩装置以及合沟铲的设置可完成挖坑、播种和覆土的操作,实现全自动化种苗,提高种苗效率。
技术研发人员:郑婷,程建徽,魏灵珠,向江,吴江
受保护的技术使用者:浙江省农业科学院
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!