多机器人协同采摘系统及其控制方法
本发明涉及农业采摘机械,尤其涉及一种多机器人协同采摘系统及其控制方法。
背景技术:
1、随着经济的持续发展,人们对高经济价值作物(茶叶、蓝莓,蘑菇等)的需求越来越大,而在大规模化的农业生产中为了保证高经济价值作物产品的质量,必须做到适时采摘。高经济价值作物采摘时期较为集中则导致高经济价值作物的采摘工作量巨大。除此之外,在采摘过程中是否对农产品产生损坏也决定了高经济价值作物的质量,直接影响了高经济价值作物的后续处理工作,并最终将严重影响到经济效益。但是现有的采摘设备工作效率较低,目前还是主要依靠人工对高经济价值作物进行采摘。
技术实现思路
1、本发明为解决现有的采摘设备工作效率较低,目前主要依靠人工对高经济价值作物进行采摘的缺点,提供一种多机器人协同采摘系统及其控制方法,采用多个机器人同时对高经济价值作物进行采摘的方式,提高了采摘效率。
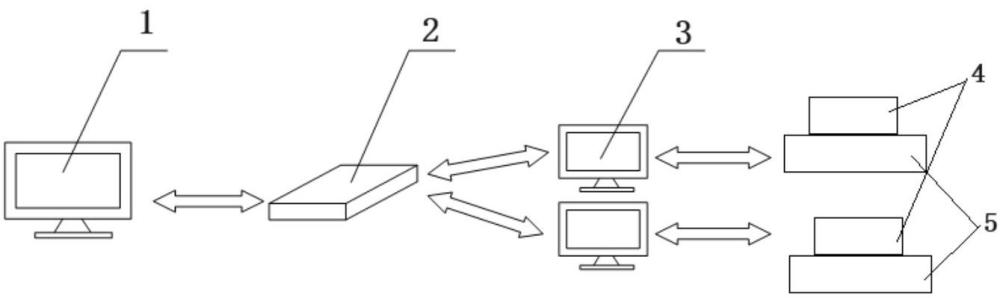
2、本发明提出的多机器人协同采摘系统,包括主控机构、通信机构、分控机构、行走机构和采摘机构,分控机构、行走机构和采摘机构的数量相同且均不少于两个,其中,通信机构用于实现分控机构与行走机构、采摘机构和主控机构的信息交互;分控机构用于对应接收并向主控机构发送来自采摘机构和行走机构的数据信息,并将来自主控机构的指令信息对应发送至采摘机构和行走机构;主控机构用于根据各分控机构传递的数据信息,分别向各分控机构发送相应的指令信息;采摘机构用于在分控机构的对应控制下采摘并收集作物;行走机构用于在分控机构的对应控制下将采摘机构运送至指定位置。
3、优选地,采摘机构包括六自由度机械臂、装配在六自由度机械臂上的电动夹爪和固定在电动夹爪上的监控模块,六自由度机械臂用于根据分控机构发送的指令信息调整电动夹爪的位姿,电动夹爪用于根据分控机构发送的指令信息夹取作物,监控模块用于采集作物的图像数据。
4、优选地,六自由度机械臂的数量不少于两个。
5、优选地,行走机构包括行走车,以及装配在行走车上的导航模块、定位标签模块、单线激光雷达和十六线激光雷达,其中,行走车用于固定采摘机构,并在分控机构的控制下按指定路径行走,导航模块用于加载行走车的目标路径,并向分控机构发送行走车的实时位置,定位标签模块用于向分控机构发送行走车的实时位姿数据和实时海拔数据,单线激光雷达用于实现行走车的低处避障,十六线激光雷达用于实现行走车的整体避障。
6、优选地,通信机构包括wifi模块和4g/5g网络模块,wifi模块用于实现采摘机构和行走机构与分控机构的通信,4g/5g网络模块用于实现分控机构和主控机构的通信,且分控机构和主控机构之间采用tcp/ip协议进行通讯。
7、本发明提出的多机器人协同采摘系统的控制方法,利用多机器人协同采摘系统实现,具体包括如下步骤:
8、s1:搭建多机器人协同采摘系统,并初始化主控机构和分控机构;
9、s2:主控机构根据待采摘区域的地形构建三维地图,并根据三维地图对各行走机构的位置和行走路径进行规划,获得规划位置和规划路径;
10、s3:将各行走机构按照规划位置摆放至指定位置,并将主控机构通过tcp/ip协议与各分控机构进行通讯连接;
11、s4:主控机构根据规划路径向各分控机构发送行走指令信息,各分控机构接收并向各行走机构对应发送行走指令信息,行走指令信息包括起始位置的经度、纬度和高度,沿途各停留点的经度、纬度和高度,终止位置的经度、纬度和高度;
12、s5:主控机构向各分控机构发送开始工作指令,各分控机构接收并向各行走机构对应发送开始工作指令;
13、s6:各行走机构根据对应的行走指令信息行走,采摘机构在分控机构的对应控制下依次采摘各沿途停留点的作物,直至所有的行走机构均抵达终止位置;
14、s7:主控机构识别到所有的行走机构均抵达终止位置后,在三维地图上查看是否存在未采摘的作物区,若存在则执行步骤s8,否则执行步骤s9;
15、s8:重复步骤s2-s7,直至完成所有作物区的采摘工作;
16、s9:主控机构向各分控机构发出停止工作指令,各分控机构接收并向各行走机构对应发送停止工作指令,完成待采摘区域内的采摘工作。
17、优选地,步骤s6具体包括如下步骤:
18、s61:当行走机构抵达第一个沿途停留点时,监控模块采集并向分控机构对应上传作物的背景图片,分控机构对背景图片进行作物的识别与位置计算;
19、s62:根据步骤s61的计算结果,分控机构向采摘机构对应发送采摘指令,采摘指令包括各个六自由度机械臂的目标位姿和各个电动夹爪的开合指令;
20、s63:采摘装置根据采摘指令对各六自由度机械臂的位姿进行控制,并在各六自由度机械臂调整至指定位姿后,通过控制各电动夹爪的开合对作物进行采摘;
21、s64:在进行一次采摘动作后,重复步骤s61-s63,直至监控模块识别不到作物,行走机构前往第二个沿途停留点;
22、s65:行走机构抵达至第二个沿途停留点,重复步骤s61-s64,直至完成规划路径内的所有作物的采摘工作。
23、优选地,行走机构抵达至各沿途停留点均停留五分钟,保证监控模块完成全方位的图像采集。
24、优选地,当单线激光雷达或十六线激光雷达识别到障碍物时,行走机构向分控机构发出障碍提示信号,分控机构通过tcp/ip协议将障碍提示信号发送至主控机构,主控机构发出警示并向障碍物所在的分控机构发出暂停工作指令,分控机构根据暂停工作指令对应控制行走机构停止工作,待障碍物被清理后,由人工控制主控机构将暂停工作指令修改为开始工作指令,并将开始工作指令通过分控机构重新发送至暂停工作的行走机构。
25、优选地,主控机构根据接收到的各分控机构实时发送的行走机构的位置及采摘机构的采摘状态,在三维地图上进行实时模拟,协调各分控机构对应的行走机构及采摘机构的工作状态。
26、与现有技术相比,本发明能够取得如下有益效果:
27、本发明提供了一种多机器人协同采摘系统及其控制方法,能够对多个机器人(包括采摘机构和行走机构)进行协同控制,并采用多个机器人同时对高经济价值作物进行采摘的方式,提高了采摘效率,降低了人工成本。
技术特征:
1.一种多机器人协同采摘系统,其特征在于,包括主控机构、通信机构、分控机构、行走机构和采摘机构,所述分控机构、所述行走机构和所述采摘机构的数量相同且均不少于两个,其中,所述通信机构用于实现所述分控机构与所述行走机构、所述采摘机构和所述主控机构的信息交互;所述分控机构用于对应接收并向所述主控机构发送来自所述采摘机构和所述行走机构的数据信息,并将来自所述主控机构的指令信息对应发送至所述采摘机构和所述行走机构;所述主控机构用于根据各分控机构传递的数据信息,分别向各分控机构发送相应的指令信息;所述采摘机构用于在所述分控机构的对应控制下采摘并收集作物;所述行走机构用于在所述分控机构的对应控制下将所述采摘机构运送至指定位置。
2.根据权利要求1所述的多机器人协同采摘系统,其特征在于,所述采摘机构包括六自由度机械臂、装配在所述六自由度机械臂上的电动夹爪和固定在所述电动夹爪上的监控模块,所述六自由度机械臂用于根据所述分控机构发送的指令信息调整所述电动夹爪的位姿,所述电动夹爪用于根据所述分控机构发送的指令信息夹取作物,所述监控模块用于采集作物的图像数据。
3.根据权利要求2所述的多机器人协同采摘系统,其特征在于,所述六自由度机械臂的数量不少于两个。
4.根据权利要求2所述的多机器人协同采摘系统,其特征在于,所述行走机构包括行走车,以及装配在所述行走车上的导航模块、定位标签模块、单线激光雷达和十六线激光雷达,其中,所述行走车用于固定所述采摘机构,并在所述分控机构的控制下按指定路径行走,所述导航模块用于加载所述行走车的目标路径,并向所述分控机构发送所述行走车的实时位置,所述定位标签模块用于向所述分控机构发送所述行走车的实时位姿数据和实时海拔数据,所述单线激光雷达用于实现所述行走车的低处避障,所述十六线激光雷达用于实现所述行走车的整体避障。
5.根据权利要求1所述的多机器人协同采摘系统,其特征在于,所述通信机构包括wifi模块和4g/5g网络模块,所述wifi模块用于实现所述采摘机构和所述行走机构与所述分控机构的通信,所述4g/5g网络模块用于实现所述分控机构和所述主控机构的通信,且所述分控机构和所述主控机构之间采用tcp/ip协议进行通讯。
6.一种多机器人协同采摘系统的控制方法,利用权利要求1-5中任意一项所述的多机器人协同采摘系统实现,其特征在于,具体包括如下步骤:
7.根据权利要求6所述的多机器人协同采摘系统的控制方法,其特征在于,所述步骤s6具体包括如下步骤:
8.根据权利要求7所述的多机器人协同采摘系统的控制方法,其特征在于,所述行走机构抵达至各沿途停留点均停留五分钟,保证所述监控模块完成全方位的图像采集。
9.根据权利要求6所述的多机器人协同采摘系统的控制方法,其特征在于,当所述所述单线激光雷达或所述十六线激光雷达识别到障碍物时,所述行走机构向所述分控机构发出障碍提示信号,所述分控机构通过所述tcp/ip协议将所述障碍提示信号发送至所述主控机构,所述主控机构发出警示并向所述障碍物所在的分控机构发出暂停工作指令,所述分控机构根据所述暂停工作指令对应控制所述行走机构停止工作,待所述障碍物被清理后,由人工控制所述主控机构将所述暂停工作指令修改为开始工作指令,并将所述开始工作指令通过所述分控机构重新发送至暂停工作的行走机构。
10.根据权利要求6所述的多机器人协同采摘系统的控制方法,其特征在于,所述主控机构根据接收到的各分控机构实时发送的所述行走机构的位置及所述采摘机构的采摘状态,在所述三维地图上进行实时模拟,协调各分控机构对应的行走机构及采摘机构的工作状态。
技术总结
本发明涉及农业采摘机械技术领域,尤其涉及一种多机器人协同采摘系统及其控制方法,系统包括主控机构、通信机构、分控机构、行走机构和采摘机构,其中,通信机构用于实现分控机构与行走机构、采摘机构和主控机构的信息交互;分控机构用于对应接收并向主控机构发送来自采摘机构和行走机构的数据信息,并将来自主控机构的指令信息对应发送至采摘机构和行走机构;主控机构用于根据各分控机构传递的数据信息,分别向各分控机构发送相应的指令信息;采摘机构用于采摘并收集作物;行走机构用于将采摘机构运送至指定位置。本发明采用多个机器人同时对高经济价值作物进行采摘的方式,提高了采摘效率。
技术研发人员:刘培勋,韩广良,贾平,孙兴龙
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!