用于使禽类腿部去骨的系统和方法与流程
1.本发明涉及一种用于使禽类腿或腿部去骨的方法和系统。更具体地,本发明涉及一种用于使禽类大腿去骨的方法和系统。
背景技术:
2.已知从禽类腿或腿部自动收获肉。通常,通过诸如夹持器或隔膜的机械装置从骨头上剥离肉。这些夹持器或隔膜可线性移动以用于剥离过程。
3.然而,难以实现夹持器或隔膜的运动的精确性和施加至骨上的力的精确性。如果夹持器过于牢固地夹持肉类,就会产生使骨碎裂的危险。如果夹持器抓住肉太弱,则出现不完全收获肉的风险。
4.因此,仍然需要改进已知的腿部去骨方法,以允许更可靠地执行自动加工步骤,并且从屠宰的禽类中收获的更高的肉制品产量。
技术实现要素:
5.因此,本发明的一个目的是提出一种用于从禽类腿或腿部收获肉的改进的系统和方法。在更一般的意义上,本发明的一个目的是克服或减少现有技术的至少一个缺点。
6.根据一个方面,提供了一种用于使禽类腿部去骨的系统,禽类腿部包括至少一根骨和包围骨的肉。腿部可包括大腿和腿下部。腿部也可为大腿或腿下部。
7.该系统包括输送单元,该输送单元布置成用于从该输送单元悬挂禽类腿部,并且用于沿着输送路径输送禽类腿部。输送单元可为高架输送单元。输送单元可为输送链。输送单元可包括用于悬挂禽类腿部的一个或多个钩环。禽类腿可例如通过踝关节悬挂在钩环上。
8.该系统还包括去骨单元。该去骨单元包括夹持器,该夹持器布置成用于抓取围绕骨的肉,该夹持器与第一承载件相关联。去骨单元包括用于打开和闭合夹持器的夹持器致动器,夹持器致动器与第二承载件相关联。该去骨单元包括夹持器张紧器,该夹持器张紧器布置成提供用于闭合夹持器的偏压力,该夹持器张紧器与第三承载件相关联。第一承载件、第二承载件和第三承载件布置成相对于基座构件竖直位移。基座构件布置成沿输送路径沿水平方向输送。夹持器可打开以抓持围绕骨的腿部,例如在膝关节处或膝关节附近。夹持器可闭合以将肉从骨中拉出。夹持器致动器致动夹持器的打开和闭合。夹持器张紧器可选择性地提供用于闭合夹持器的偏压力。因此,提供了一种高度柔性的系统,利用该系统可利用偏压力或不利用偏压力来选择性地闭合夹持器。另外,通过第三承载件相对于第一承载件的运动,可调节闭合夹持器的偏压力的大小。
9.可选地,基座构件包括用于在竖直方向上引导第一承载件、第二承载件和第三承载件的线性引导件。线性引导件可例如包括两个引导杆。因此,第一承载件、第二承载件和第三承载件可容易地独立地竖直移动,同时沿着传送路径在水平方向上同步传送。基座构件可为环形带的部分,优选地与输送单元同步地移动。
10.可选地,去骨单元包括第一引导件,以及第一承载件包括用于跟随第一引导件的第一随动件。可选地,去骨单元包括第二引导件,以及第二承载件包括用于跟随第二引导件的第二随动件。可选地,去骨单元包括第三引导件,并且第三承载件包括用于跟随第三引导件的第三随动件。通过为每个承载件提供单独的引导件,可容易且有效地实现承载件的相互移动。可选地,第一引导件、第二引导件和第三引导件是固定的。因此,可容易地设置引导件。
11.可选地,第一引导件是第一引导通道,和/或第二引导件是第二引导通道,和/或第三引导件是第三引导通道。可选地,去骨系统包括引导板,该引导板包括第一引导通道、第二引导通道和/或第三引导通道的至少部分。优选地,第一引导通道、第二引导通道和第三引导通道的至少部分设置为引导板中的切口。优选地,设置多个引导板,它们一起形成第一引导通道、第二引导通道和第三引导通道。因此,可以以简单的方式提供第一引导件、第二引导件和第三引导件。另外,通过更换引导板中的一个或多个,可容易地改变去骨系统的操作。第一引导通道、第二引导通道和/或第三引导通道也可设置为引导通道部分,诸如由u形轮廓件或一个或多个引导条形成。
12.可选择地,夹持器包括第一夹爪和第二夹爪,第一夹爪和第二夹爪可相对于彼此旋转并安装至第一承载件上。第一夹爪和/或第二夹爪可包括切口,用于允许夹爪完全闭合在骨周围而不损坏骨。优选地,第一夹爪和第二夹爪都可旋转地安装至第一承载件。第一夹爪和第二夹爪可具有共同的旋转轴线。
13.可选地,夹持器致动器包括将可旋转的第一夹爪连接至第二承载件的第一臂,使得第二承载件相对于第一承载件的相对位移使第一夹爪旋转。第一臂可布置成使得当第二承载件移动到更靠近第一承载件时,第一夹爪朝向闭合位置旋转。优选地,夹持器致动器包括将可旋转的第二夹爪连接至第二承载件的第二臂,使得第二承载件相对于第一承载件的相对位移使第二夹爪旋转。第二臂可布置成使得当第二承载件移动到更靠近第一承载件时,第二夹爪朝向闭合位置旋转。还可能的是,第一夹爪联接至第二夹爪,使得第一夹爪打开或闭合的致动从第一夹爪传递至第二夹爪。第一夹爪和第二夹爪例如可包括啮合齿轮部分,用于使夹爪同步旋转。
14.可选地,诸如弹簧的弹性构件插入在第二承载件和第三承载件之间。弹性构件可布置成迫使第二承载件远离第三承载件。可替代地,弹性构件可布置成迫使第二承载件朝向第三承载件。因此,可通过控制第一承载件和第三承载件之间的距离来控制偏压力。
15.可选地,该系统布置成使得在第一模式中,夹持器处于打开状态,而在第二模式中,夹持器被偏压在闭合位置。在第二模式中,弹性构件可偏压第二承载件以致动夹持器闭合。弹性构件可将第二承载件朝向第一承载件偏压,以闭合夹持器。在第二模式中,弹性构件的偏压力一方面由第三引导件支承,另一方面由夹持器(或由夹持器保持的腿)支承。可选地,该系统布置成使得在第三模式中夹持器被迫处于闭合位置。在第三模式中,弹性构件的偏压力不施加至夹持器。相反,第二承载件迫使夹持器闭合。
16.可选地,第二引导通道包括至少一个部分,其中第二随动件通过游隙进行引导,从而允许第二承载件相对于第一承载件和第三承载件竖直移动。在第二模式中,间隙允许第二承载件相对于第一承载件和第三承载件移动,以将偏压力从第三承载件传递至夹持器。
17.根据一方面,提供了一种用于处理禽类腿的系统。该系统包括布置成用于悬挂禽
类腿部的输送系统。该系统包括测量系统,该测量系统布置成用于测量悬挂在输送系统上的每个禽类腿的长度。该系统包括布置成于切割肉的预切割系统,并且包括高度调节单元,该高度调节单元用于例如基于由测量系统执行的测量来调节禽类腿相对于切割装置预切割系统的高度。该系统包括如上所述的去骨系统。预切割允许容易和有效的去骨。高度调节单元允许精确的预切割。
18.根据一方面,提供了一种用于使禽类腿部去骨的方法,禽类腿部包括至少一根骨和包围骨的肉。该方法包括沿着输送路径输送悬挂的禽类腿部。该方法还包括用与第一承载件相关联的夹持器抓住包围骨的肉。该方法还包括通过相对于第一承载件移动与第二承载件相关联的夹持器致动器来围绕腿部致动夹持器闭合。该方法还包括通过与第三承载件相关联的夹持器张紧器通过相对于第一承载件移动第三承载件来确定用于闭合夹持器的偏压力。因此,提供了一种高度柔性的方法,利用该方法可利用偏压力或不利用偏压力来选择性地闭合夹持器。另外,通过第三承载件相对于第一承载件的运动,可调节闭合夹持器的偏压力的大小。
19.可选地,第一承载件、第二承载件和第三承载件布置成相对于基座构件竖直位移,以及基座构件布置成沿着输送路径沿水平方向输送。因此,可使用简单的结构。
20.可选地,该方法包括通过使第一承载件的第一随动件跟随第一引导件来移动第一承载件,通过使第二承载件的第二随动件跟随第二引导件来移动第二承载件,以及通过使第三承载件的第三随动件跟随第三引导件来移动第三承载件。因此,可容易地实现承载件的运动。可选地,第一引导件、第二引导件和第三引导件是固定的。
21.可选地,该方法包括通过朝向第一承载件移动第二承载件来闭合夹持器。
22.可选地,确定偏压力包括在第二承载件和第三承载件之间包括弹性构件,诸如弹簧。因此,可以以简单的方式提供偏压力。
23.可选地,该方法包括偏压第二承载件以致动夹持器闭合。因此,夹持器可用偏压力闭合。可选地,弹性构件的偏压力一方面由第三引导件支承,以及另一方面由夹持器支承,或由夹持器保持的腿支承。因而,有效地施加偏压力以闭合夹持器。
24.可选地,该方法包括允许第二承载件相对于第一承载件和第三承载件自由地移动,以将偏压力从第三承载件传递至夹持器。因此,偏压力被简单地传递至夹持器。
25.可选地,该方法包括迫使夹持器处于闭合位置。因此,代替偏压夹持器闭合,夹持器可牢固地闭合,其中弹性构件的偏压力不施加至夹持器上。
26.可选地,该方法包括:在抓紧围绕骨的肉之前,预切割围绕骨的肉,以在抓紧位置处或附近提供切割部。因此,可更容易和更有效地进行去骨。可选地,该方法包括:在预切割肉之前,相对于用于预切割肉的切割装置调节禽类腿部的高度。因此,可在相对于禽类腿部的解剖结构的精确位置处执行预切割,例如在膝关节处或附近。可选地,该方法包括测量禽类腿部的长度以允许调节高度。例如,可测量整个腿部的长度,或例如从钩环到膝关节的长度。
27.如上所述,用于处理禽类腿的系统可包括预切割系统。已经发现的是,这种预切割系统也可改进。因此,作为与这里的去骨系统和方法分开的主题,还描述了一种改进的预切割系统和方法。
28.因此,可提供一种用于预切割禽类腿部的系统,禽类腿部包括股骨和胫骨以及包
围骨骼的肉。该系统包括输送单元,该输送单元包括至少一个钩环,该钩环布置成用于将禽类腿部从踝关节悬挂在其上,并用于沿着输送路径输送禽类腿部。该系统还包括预切割单元。预切割单元包括切割单元,该切割单元布置成用于在膝关节处或膝关节附近切割肉。切割单元可布置成用于在膝盖的一侧或多侧上、例如在两个相对侧上切割肉。例如,在膝关节处或膝关节附近预切割肉类允许更容易地去骨。预切割单元还包括抓紧器,该抓紧器布置成抓取围绕股骨的肉。抓紧器包括两个抓取爪,这两个抓取爪布置成选择性地处于第一位置或第二位置。在第一打开位置,抓取爪间隔开,用于接收或释放腿部。在第二闭合位置,抓取爪闭合以保持腿部定位。因此,当由切割单元切割时,腿可保持适当定位。抓取爪定位成抓住膝关节下面的股骨周围的肉。这允许牢固地保持腿部。抓紧器安装至抓紧器传送器上,该抓紧器传送器布置成与钩环同步地移动抓紧器。因此,抓紧器可处于打开位置以接收腿部。然后,将抓紧器闭合,并将腿部移动经过切割单元,以切割肉,同时将抓紧器保持在闭合位置。接着,可再次打开抓紧器以释放腿部。
29.可选地,每个抓取爪均包括抓持杆。抓握杆可有效地将腿部保持在适当位置。可选地,抓持杆在第二位置基本上平行。因此,腿部的尺寸几乎不影响抓紧器将腿部保持在适当位置的能力。另外,这样,抓紧器不会迫使腿部到达特定位置,而是允许腿部自然地悬挂在钩环上。可选地,在第二位置,抓握杆处于非水平位置,在腿的前侧比在腿的后侧低。考虑到大腿肉在股骨周围的总体分布,倾斜的抓握杆允许有效地抓握大腿肉。
30.可选地,预切割系统还包括旋转台,该旋转台布置成用于同步地旋转钩环和抓紧器二者。同步旋转确保腿部相对于钩环保持在适当的位置。可理解的是,这里的同步旋转允许在钩环的旋转和抓紧器的旋转之间有较小的相位差,例如在旋转期间的任何时间不超过15度,优选不超过10度。旋转台之后可为第二切割单元,用于制造一个或多个第二切割部,例如相对于由较早的切割单元制造的切割部成90度。
31.还提供了一种用于预切割禽类腿部的方法,禽类腿部包括股骨和胫骨以及包围骨的肉。该方法包括将腿部悬挂在输送单元的钩环上。股骨周围的肉由包括两个抓取爪的抓紧器抓取。首先,抓紧器处于打开位置,用于接收腿部。然后,将抓紧器闭合,并将腿部移动经过切割单元,以切割肉,同时将抓紧器保持在闭合位置。在这里,抓紧器与钩环同步地移动。接着,可再次打开抓紧器以释放腿部。
32.应当理解的是,鉴于系统所提及的所有特征和选项同样适用于该方法,以及鉴于方法所提及的所有特征和选项同样适用于该系统。还将清楚的是,可组合上述方面、特征和选项中的任何一个或多个。
附图说明
33.现在将参考附图来详细描述本发明的实施方式,在附图中:
34.图1是去骨系统的示意图;
35.图2是去骨系统的示意图;
36.图3是去骨系统的示意图;
37.图4是禽类加工系统的示意图;以及
38.图5是预切割系统的示意图。
具体实施方式
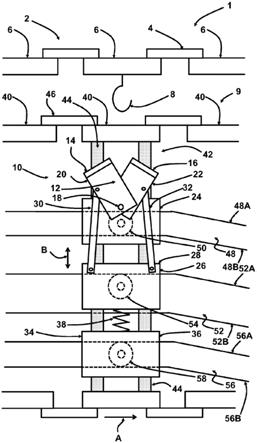
39.图1示出了用于使禽类腿部去骨的系统1的示意图,其中,具体地,禽类腿部是包括至少一根骨和包围骨的肉的腿部,诸如包括大腿和腿下段的禽类腿部、或禽类大腿或禽类腿下段。
40.系统1包括输送单元2,该输送单元2布置成悬挂禽类腿部,并用于沿输送路径在输送方向a上输送禽类腿部。在该示例中,输送单元2是高架输送单元。在在这里,输送单元2是输送链4。输送单元2包括用于悬挂禽类腿部的多个钩环6。禽类腿可例如通过腿的踝关节悬挂在钩环6的钩8上。
41.系统1还包括去骨系统9,该去骨系统9包括一个或多个去骨单元10。去骨单元10包括夹持器12,该夹持器布置成用于抓取包围骨的肉。在在这里,夹持器12包括第一夹爪14和第二夹爪16。在在这里,夹爪14、16可围绕枢轴18相对于彼此旋转。在该示例中,第一夹爪14包括将夹爪14连接至枢轴18的第一夹爪板20。在该示例中,第二夹爪16包括将夹爪16连接至枢轴18的第二夹爪板22。第一夹爪14和第二夹爪16通过枢轴18安装至第一承载件24。因此,夹持器12安装在第一承载件24上。第一夹爪14和/或第二夹爪16可包括切口,用于允许夹爪围绕骨完全闭合而不损坏骨。
42.去骨单元10包括夹持器致动器26,该夹持器致动器26布置成打开和闭合夹持器12。夹持器致动器26与第二承载件28相关联。在该示例中,夹持器致动器26包括将可旋转的第一夹爪14连接至第二承载件28的第一臂30。在该示例中,夹持器致动器26还包括将可旋转的第二夹爪16连接至第二承载件28的第二臂32。第一臂30枢转地连接至第一夹爪14,并枢转地连接至第二承载件28。第二臂32枢转地连接至第二夹爪16,并枢转地连接至第二承载件28。显然,第二承载件28相对于第一承载件24的相对位移将使第一夹爪14和第二夹爪16围绕枢轴18旋转。当第二承载件28移动靠近第一承载件24时,夹爪14、16朝闭合位置旋转。可理解的是,第一夹爪也可联接至第二夹爪,使得使第一夹爪打开或闭合的致动从第一夹爪传递至第二夹爪。第一夹爪和第二夹爪例如可包括啮合齿轮部分,用于使夹爪同步旋转。在这种情况下,可省略第二臂。
43.去骨单元10包括夹持器张紧器34,该夹持器张紧器34布置成提供用于闭合夹持器12的偏压力。夹持器张紧器34与第三承载件36相关联。在该示例中,诸如弹簧的弹性构件38插在第二承载件28与和第三承载件36之间。在这里,弹性构件38布置成迫使第二承载件28远离第三承载件36。
44.在图1中,第一承载件24、第二承载件28和第三承载件36布置成相对于基座构件40竖直位移。在该示例中,基座构件40包括用于沿竖直方向b引导第一承载件24、第二承载件28和第三承载件36的线性引导件42。在这里,线性引导件42包括两个引导杆44。承载件24、28、36可例如包括用于沿引导杆44滑动的滑动轴承。因而,第一承载件24、第二承载件28和第三承载件36可容易地独立地竖直移动。
45.基座构件44布置成沿输送路径沿水平方向a输送。基座构件可安装至诸如环形带的去骨输送机46或去骨输送机46的部分。在该示例中,去骨系统9包括组装到环形带上的多个去骨单元10(为了清楚起见,仅部分地画出相邻去骨单元的基座构件40)。去骨输送机46布置成用于使去骨单元10在输送方向a上与输送单元2同步地移动。因此,悬挂在预定钩环6上的禽类腿将与相关的去骨单元10同步地沿输送方向a移动。因而,第一承载件24、第二承
载件28和第三承载件36可容易地独立地竖直移动,同时沿着输送路径沿水平方向同步地输送。
46.在图1中,去骨系统9包括第一引导件48,以及第一承载件24包括用于跟随第一引导件48的第一随动件50。在这里,第一引导件48是具有上引导壁48a和下引导壁48b的引导通道。在这里,第一随动件50是可旋转地安装至第一承载件24的第一随动件轮。在图1中,第一随动件50被画成重影,因为它附接至第一承载件24的后部。可理解的是,当第一随动件50跟随第一引导件48时,根据第一引导件48的局部竖直位置,第一承载件可在沿输送方向a输送的同时向上或向下移动。在图1中,去骨系统9包括第二引导件52,以及第二承载件28包括用于跟随第二引导件52的第二随动件54。在这里,第二引导件52是具有上引导壁52a和下引导壁52b的引导通道。在这里,第二随动件54是可旋转地安装至第二承载件28的第二随动轮。在图1中,第二随动件54被画成重影,因为它附接至第二承载件28的后部。可理解的是,当第二随动件54跟随第二引导件52时,第二承载件可在沿输送方向a输送的同时上下移动,这取决于第二引导件54的局部竖直位置。在图1中,去骨系统9包括第三引导件56,以及第三承载件36包括用于跟随第三引导件56的第三随动件58。在这里,第三引导件56是具有上引导壁56a和下引导壁56b的引导通道。在这里,第三随动件58是可旋转地安装至第三承载件36的第三随动轮。在图1中,第三随动件58被画成重影,因为它附接至第三承载件36的后部。可理解的是,当第三随动件58跟随第三引导件56时,根据第三引导件56的局部竖直位置,第三承载件可在沿输送方向a输送的同时向上或向下移动。
47.图2示出了关于图1描述的去骨系统1的示意性图示。在图2中,示出了沿着输送路径在递增位置处的多个去骨单元10。在使用中,去骨单元10在输送方向a上与输送单元2的多个钩环6同步地输送。在图2中,包括腿下段d和大腿t的禽类腿l通过踝关节悬挂在每个钩环上。
48.在图2中,示出了沿着输送方向a的连续位置i
‑
vii的去骨单元10。应当理解的是,每个单独的去骨单元10均在沿输送方向输送的同时将连续通过位置i
‑
vii。第一随动件50位于第一引导通道48中。第二随动件54位于第二引导通道52中。第三随动件58位于第三引导通道56中。
49.在该示例中,在位置i,当夹爪14和夹爪16处于打开位置时,腿l悬挂在夹持器12附近。腿l可在膝关节附近进行预切割,以允许有效的去骨。腿l的高度位置可已经进行预先调节,例如使得膝关节与夹持器12对准。另外,腿部长度测量系统可在去骨系统1之前,用于确定腿部的长度和/或膝关节的位置。另外,高度调节系统可在去骨系统1之前,用于调节腿的高度位置。可理解的是,钩环6可包括用于调节腿l相对于钩环的悬挂高度的装置。腿l的高度可例如进行调节,使得腿的膝关节相对于夹爪14、16适当地定位。在这里,弹性构件38在位置i处处于非偏压状态,尽管这不是必需的。
50.在该示例中,从位置i到位置ii,第三引导通道56倾斜,即向上偏离。第三引导通道56与第二引导通道52之间的距离减小。结果,弹性构件38被压缩,并提供从第一承载件36到第二承载件28上的偏压力。第二随动件54将被压靠在第二引导通道上壁52a上,以及第三随动件将被压靠在第三引导通道下壁56b上。当没有力施加至第一承载件24上时,第一随动件50可在重力作用下抵靠第一引导通道下壁48b。
51.从位置ii到位置iii,在本示例中,第二引导通道52也倾斜。第二引导通道52与第
一引导通道48之间的距离减小。结果,第二承载件28朝向第一承载件24移动,并且夹持器12围绕腿l闭合。在这里,保持第三承载件36与第二承载件28之间的距离,从而保持偏压力。
52.从位置iii到位置iv,在本示例中,第二引导通道52保持倾斜。第二引导通道52和第一引导通道48之间的距离进一步减小。结果,第二承载件28进一步朝向第一承载件24移动,并且夹持器12进一步围绕腿l闭合。注意,在该示例中,从位置ii到位置iv,第二引导通道52变宽。因此,第二随动件54以可观的游隙容纳在第二引导通道中。在位置iv,可看到夹持器围绕腿l的骨完全闭合。第二引导通道52中的间隙允许第二随动件54克服弹性构件38的偏压力而被向下压。因此,夹持器12通过由弹性构件38提供的偏压力围绕腿l闭合。这允许骨厚度的变化。这还允许夹爪14、16与骨之间的强制接触,从而允许有效地刮去骨的肉。由于夹持器12的闭合力受到弹性构件38的限制,这也允许避免损坏骨。
53.从位置iv到位置v,第一引导通道48下降,即向下偏离。因此,第一承载件24向下移动。结果,绕骨偏压闭合的夹持器12向下移动,并将肉从大腿骨上拉出。第二引导通道52和第三引导通道54也下降,从而允许第二承载件28和第三承载件36也向下移动。在这里,第二引导通道52仍然加宽,以允许夹持器保持偏压闭合。
54.从位置v到位置vi,在该示例中,第二引导通道52和第一引导通道之间的距离增加,使得夹持器12再次打开。在该示例中,从位置vi到位置vii,第三引导通道和第二引导通道之间的距离增加,从而由弹性构件38产生的偏压力被去除,或至少减小。
55.在图2的例子中,设置了第一导板60。第一导板60包括与位置i至iii相关联的第一引导通道48、第二引导通道52和第三引导通道56的部分。在这里,设置了第二导板62。第二导板62包括与位置iv和v相关联的第一引导通道48、第二引导通道52和第三引导通道56的部分。在这里,设置了第三导板64。第三导板64包括与位置vi和vii相关联的第一引导通道48、第二引导通道52和第三引导通道56的部分。因此,导板60、62、64一起形成第一引导通道48、第二引导通道52和第三引导通道56。导板静止地定位。通过更换导板中的一个或多个,可容易地改变第一承载件24、第二承载件28和第三承载件36的相对运动。因此,可容易地改变去骨系统1的操作。因此,可简单地改变去骨系统1的操作以满足不同的要求。
56.通常,可理解的是,在第一模式中,夹持器处于打开位置。在第二模式中,夹持器被偏压到闭合位置。在可选的第三模式中,可用比由弹性构件传递的力更大的力均夹持器迫到闭合位置。第一模式、第二模式和第三模式可沿着输送方向应用在不同的位置。在第一模式中,选择第一引导件和第二引导件之间的距离,使得夹持器保持在打开位置。在第一模式中,没有偏压力施加至夹持器以闭合。偏压构件在第三承载件和第二承载件之间施加力。在第一模式中,第二引导件可布置成使得偏压力由第二引导件吸收。在第二模式中,第二引导件可布置成使得偏压力不由第二引导件吸收。相反,然后,偏压力传递至夹持器,以将夹持器偏压到闭合位置。在第三模式中,选择第一引导件和第二引导件之间的距离,使得将夹持器带到其闭合位置。然后,偏压构件不向夹持器施加偏压力。
57.应当理解的是,在示例中,第一模式和第二模式以及可选的第三模式可通过适当定位第二引导通道和第三引导通道以及第一引导通道的边界表面来实现。
58.在上述示例中,如果第一通道下壁48b和第二通道上壁52a之间的距离使得夹持器被迫(例如通过重力)到打开位置,则可实现第一模式。在这种情况下,可能的是,第三通道下壁56b和第二通道上壁52a之间的距离使得弹性构件将第三随动件58压靠在第三通道下
壁56b上,并且将第二随动件54压靠在第二通道上壁52a上。因此,任何偏压力均将由第二引导通道52吸收。如果第一通道上壁48a和第三通道下壁56b之间的距离太大而不能将夹持器偏压到闭合位置,则也可实现第一模式。
59.在上述示例中,如果第一通道上壁48a和第三通道下壁56b之间的距离使得弹性构件38被压缩,同时第一通道上壁48a和第二通道下壁52b之间的距离使得第二随动件54不邻接第二通道下壁52b,则可实现第二模式。可理解的是,可通过调节第一通道上壁48a和第三通道下壁56b之间的距离来选择闭合夹持器的偏压力的大小。
60.在上述示例中,如果第一通道上壁48a和第二通道下壁52b之间的距离使得第一随动件50抵靠第一通道上壁48a,以及第二随动件54抵靠第二通道下壁52b,同时夹持器处于闭合位置(例如,抵靠腿部闭合),则可实现第三模式。
61.图3示出了示例性去骨系统1的示意性图示。图3示出了如图1和图2所示的多个去骨单元10。在这个例子中,禽类腿l在i处提供给去骨系统。在这里,腿l在已经制成的膝盖的高度处设置有围绕腿的周边的切口。在阶段ii中,夹持器12在膝关节处抓取大腿肉并向下拉动肉。在阶段iii中,夹持器12打开并且旋转腿部l,在这里旋转大约90度。然后,夹持器12向上移动,再次闭合并沿着大腿骨重新刮擦。在阶段iv中,夹持器12打开,向上移动,再次闭合并沿着大腿骨重新刮擦。在阶段v中,夹持器12再次打开,向上移动,再次闭合,并沿着大腿骨再刮擦到髋关节下方并拉动肉张紧。在阶段vi,第一切割单元66切割髋关节下面的大腿肉。在阶段vii,夹持器12打开,向上移动,再次闭合,并抓住大腿骨并将其拉紧。在阶段viii,第二切割单元68从腿下段切割大腿骨。在阶段ix,打开夹持器以确保弹出大腿骨。
62.图4示出了用于处理禽类腿或腿部的系统100的示意图,禽类腿或腿部诸如为包括腿下段(drumstick)和大腿的腿l。系统100包括输送系统101,该输送系统101布置成用于悬挂禽类腿部,并且用于沿着输送路径在输送方向a上输送禽类腿部。在该示例中,禽类腿通过踝关节悬挂在钩环上。在该示例中,输送系统101是包括多个钩环6的高架输送系统。系统100包括布置成用于接收禽类腿的接收系统102。禽类腿可手动或以自动方式悬挂在钩环上。在该示例中,传送系统101将禽类腿从接收系统102传送到测量系统104。测量系统104布置成用于测量每个腿的长度。在这里,测量系统104测量膝关节相对于钩环的位置。在该示例中,输送系统将禽类腿从测量系统104输送至预切割系统106。在这里,预切割系统布置成用于切割靠近膝关节的肉和任选的腱,以允许容易地刮去骨的肉。在该示例中,高度调节单元108设置为用于调节禽类腿相对于诸如预切割系统106的刀具(例如旋转刀具)的切割装置的高度。高度调节单元108例如可调节禽类腿的高度,使得腿的膝关节相对于切割装置处于预定高度,例如基于测量系统104执行的测量。在该示例中,输送系统将禽类腿从预切割系统106输送至去骨单元110。去骨单元110可布置为上述去骨系统1,诸如图3的去骨系统1。去骨系统的输送单元2例如可为输送系统101的部分。在本示例中,去骨单元110将大腿去骨,同时将肉留在腿下段上。应当理解的是,如果需要,去骨单元110也可设置有一个或多个高度调节单元。
63.图5示出了预切割系统200的示意性示例,例如用作图4中的预切割系统106。预切割系统200布置成用于预切割禽类腿部,包括股骨和胫骨以及包围骨的肉。因此,禽类腿部包括大腿t和腿下段d。系统200包括输送单元202,该输送单元202布置成用于悬挂禽类腿部,并用于沿输送路径沿输送方向a输送禽类腿部。在该示例中,禽类腿通过踝关节从钩环6
悬挂。在该示例中,输送单元202是包括多个钩环的高架输送系统。
64.系统200还包括预切割单元204。在该示例中,预切割单元204包括第一切割单元206a,第一切割单元布置成用于在膝关节处或膝关节附近切割肉。在这里,第一切割单元包括两个刀,这里是旋转刀,用于在膝盖的两个相对侧切割肉。在该示例中,预切割单元204还包括第二切割单元206b,第二切割单元布置成用于在膝关节处或膝关节附近切割肉。在这里,第二切割单元包括两个刀,这里是旋转刀,用于在膝盖的两个相对侧切割肉。
65.预切割单元204还包括抓紧器208,布置成抓取股骨周围的肉。在该示例中,抓紧器208包括两个抓取爪210a、201b,其布置成选择性地处于第一位置或第二位置。在第一打开位置,抓取爪210a、210b间隔开,以用于接收或释放腿部。在第二闭合位置,抓取爪210a、210b闭合以保持腿部定位。因此,当由切割单元206a或206b切割时,腿可保持适当的定位。抓取爪210a、210b定位成抓住膝关节下面的股骨周围的肉。这允许牢固地保持腿部。在该示例中,抓取爪210a、210b中的每一个均绕枢转轴线212a、212b枢转地安装至基座214。
66.在该示例中,抓取爪210a、210b均包括抓持杆216a、216b。抓握杆216a、216b可有效地将腿部保持在适当位置。在这里,抓持杆216a、216b在第二位置基本平行。因此,腿部的尺寸几乎不影响抓紧器将腿部保持在适当位置的能力。另外,这样,抓紧器不会迫使腿部到达一定的位置,而是允许腿部自然地悬挂在钩环上。在图5的例子中,抓握杆216a、216b安装在非水平位置,在腿的前侧f比在腿的后侧r低。倾斜的抓握杆216a、216b允许有效地抓握大腿肉,考虑到肉在股骨周围的总体分布。
67.抓取爪210a、210b各自枢转地安装至基座214。基座214安装在抓紧器传送器218上,该抓紧器传送器218布置成与钩环6同步地移动抓紧器208。
68.预切割系统200可如下操作。抓紧器208可处于打开位置,用于在接收位置p1处接收腿部。可选地,腿部首先设置在抓紧器208的道路之外,以避免与抓取杆216a、216b碰撞,并在抓取杆216a、216b之间沿垂直于输送方向a的方向移动,直到大腿在抓取杆之间。然后,闭合抓紧器,抓取腿部的大腿肉。然后,钩环6和抓紧器208在输送方向a上同步移动。因此,腿部在位置p2处移动经过第一切割单元206a。在那里,切割肉,同时抓紧器208保持在闭合位置。在该示例中,第一切割单元206a制造相对的第一切割部c1和第二切割部c2。在位置p3,放置旋转站220。在旋转站220处,钩环6和抓紧器208二者同步旋转。另外,基座214例如通过块215可旋转地附接至输送机218。同步旋转确保腿部相对于钩环保持在适当位置。在该示例中,腿部绕竖直轴线旋转90度以上。然后,钩环6和抓紧器208在输送方向a上继续同步运动。因此,腿部在位置p4处移动经过第二切割单元206b。在那里,切割肉,同时抓紧器208保持在闭合位置。在该示例中,第一切割单元206a制造相对的第三切割部c3和第四切割部c4。显然,在该示例中,由第二切割单元206b制造的切割部在未由第一切割单元206a切割的侧部上。因此,现在腿部在膝盖处被全方位地切割。在位置p5,抓紧器204再次打开以释放腿部。可选地,腿部可在垂直于输送方向a的方向上移出抓紧器208的通道,以避免与抓取杆216a、216b碰撞。
69.应当理解的是,钩环6和抓紧器204在输送方向上的运动优选地是连续运动,而没有停止。因此获得了有效的预切割。可将腿部提供给预切割系统,并且从预切割系统中取出腿部,同时钩环和抓紧器保持移动。
70.可理解的是,在图5的例子中,包括高度调节单元,用于调节钩环的高度,以便将腿
部的膝盖的竖直位置与第一切割单元和/或第二切割单元对准。在这里,参考本发明的实施方式的具体示例来描述本发明。然而,显然,在不脱离本发明的实质的情况下,可在其中进行各种修改和改变。为了清楚和简明的目的,在此描述了作为相同或单独实施方式的一部分的描述特征,然而,也可设想具有在这些单独实施方式中描述的所有或一些特征的组合的替换实施方式。
71.在实例中,弹性构件布置成迫使第二承载件远离第三承载件。弹性构件也可布置成迫使第二承载件朝向第三承载件。在这种情况下,第三承载件可位于第二承载件之上。
72.关于图3的例子,描述了一组详细的阶段。应当理解的是,可应用不同的顺序或步骤数量。例如,在到达第一切割单元之前,大腿被刮擦四次。还可将大腿刮一次、两次、三次、或任何合适的次数。在图3的例子中,腿部在两个刮擦步骤之间旋转一次。可理解的是,腿部也可在刮擦步骤之间旋转一次以上。在图3中示出了两个切割单元。应当理解的是,其它数量的切割单元也是可能的。
73.在实施方式中,显示了包括大腿和腿下段的禽类腿的加工。应当理解,该系统和方法也可应用于腿下段或大腿。在实施方式中,只有大腿去骨。可理解的是,也可使大腿和腿下段去骨。
74.在图2和图3的例子中,提供了多个引导板,这些引导板一起形成第一引导通道、第二引导通道和第三引导通道。可理解的是,引导板中的引导通道的形状可根据需要容易地改变。因此,可以以简单的方式设置第一引导件、第二引导件和第三引导件。因而,可容易地改变去骨系统的操作,例如用于去骨腿下段。
75.应当理解的是,代替引导板或除了引导板之外,还可例如通过使用引导通道部分来形成引导通道。引导通道部分可例如由u形轮廓形成,或例如由一组两个(例如上和下)引导条形成。引导通道部分可例如可调节地安装,以便允许通过简单地重新对准引导通道部分中的一个或多个来修改剥离过程。然而,其它修改、变化和替换也是可能的。因此,应认为说明书、附图和示例是说明性的,而不是限制性的。
76.为了清楚和简明的目的,在这里将描述作为相同或单独实施方式的部分的描述特征,然而,应当理解的是,本发明的范围可包括具有所描述的所有或一些特征的组合的实施方式。
77.在权利要求中,置于括号中的任何参考符号不应被解释为限制权利要求。词语“包括”不排除存在权利要求中所列以外的其它特征或步骤。另外,词语“一”和“一个”不应被解释为限于“仅一个”,而是用于表示“至少一个”,并且不排除多个。在互不相同的权利要求中陈述某些措施的事实并不表示这些措施的组合不能被用于优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1