挂面自动拉伸机及使用方法与流程
1.本发明属于挂面生产设备领域,特别涉及挂面自动拉伸机及使用方法。
背景技术:
2.挂面是细若发丝、洁白光韧,并且耐存、耐煮的手工面食。
3.在挂面生产过程中有一个拉伸的重要步骤,这一步是将粗条的挂面进行拉伸使其变细,目前在挂面生产过程中普遍采用人工进行拉伸,工人首先将挂面缠绕在两根挂面杆上,工人将其中一根挂面杆进行固定后,工人对另外一根挂面杆进行快速拉伸和放松,经过人工十数次的往复拉伸和放松使挂面逐渐边长成型,但是采用人工拉伸具有效率低和人工强度大的问题。
4.申请号为cn202010800021.7的专利提出手拉挂面的加工方法,该专利中虽然提出了将挂面逐渐由粗变细的方案,但是这种通过挤压的方式失去了传统挂面所必不可少的拉伸步骤,使挂面失去了拉伸过程中给挂面带来的相关变化,如弹性和柔性等,丧失了传统挂面的口感。
5.申请号为cn202210003985.8的专利提出高蛋白手工挂面及其制作方法,该专利中提出了挂面的制作方法和加工方法,但是所采用的仍然是传统的手工往复拉伸,依然存在本技术中所提出需要人工往复拉伸的技术问题。
技术实现要素:
6.本发明所要解决的技术问题是,提供挂面自动拉伸机及使用方法,来解决挂面需要人工进行往复拉伸的问题。
7.为解决上述问题,本发明采用以下技术方案:
8.挂面自动拉伸机,包括机架,机架上设置有驱动装置、传送链条、上料组件、下料组件、升降组件和平移组件,传送链条水平设置在机架上,上料组件和下料组件沿传送链条输送方向依次设置在传送链条下方,升降组件和平移组件均设置在传送链条上方,传送链条用于输送物料,上料组件用于将传送链条上物料输送至平移组件上,平移组件通过平移将物料沿传送链条输送方向进行传送,升降组件用于对平移组件上物料进行拉伸,下料组件用于将平移组件上物料输送至传送链条上,机架倾斜设置,下料组件设置在传送链条倾斜向上的一端下方,传送链条和升降组件均与驱动装置传动连接。
9.进一步的,传送链条上均匀设置有数量至少为两个的放置槽,传送链条的数量为两个,两个传送链条对称的转动连接在机架上,机架上设置有位于传送链条上方的限位板,限位板位于传送链条和升降组件之间,传送链条倾斜向下的一端延伸至机架外侧,两个传送链条之间设置有承接板,承接板两侧分别与机架固定连接。
10.进一步的,上料组件包括两根上料杆,两根上料杆分别设置在两个传送链条的下方且位于放置槽下方,两根上料杆上端均设置有叉口,两根上料杆均滑动连接在机架上。
11.进一步的,升降组件包括两个升降杆和两个拉伸板,驱动装置与两个拉伸板传动
连接,两根升降杆分别设置在机架的两侧且垂直于传送链条设置,两个拉伸板对称的设置在传动链条上方,驱动装置用于驱动两个拉伸板沿两个升降杆升降,拉伸板上沿机架倾斜向上方向依次设置有拉伸段和下拉伸卡槽,拉伸段的数量至少为一个,拉伸段上呈阶梯状依次设置有上拉伸卡槽,相邻拉伸段上的上拉伸卡槽之间高度差逐渐降低,上拉伸卡槽和下拉伸卡槽的数量均至少为两个,下拉伸卡槽呈阶梯状依次下降,拉伸板底端的上拉伸卡槽与拉伸板底端的下拉伸卡槽相平齐。
12.进一步的,平移组件包括横向驱动装置和两个平移板,横向驱动装置设置在机架上,两个平移板对称的设置在传送链条上方,横向驱动装置与两个平移板传动连接,横向驱动装置用于驱动两个平移板横向移动,平移板移动方向平行于传送链条输送方向,两个平移板与两个拉伸板错位设置,两个平移板高于两个拉伸板,平移板上设置有与上拉伸卡槽和下拉伸卡槽相对应的上料卡槽和下料卡槽,上料卡槽远离下料卡槽的一侧延伸设有承接卡槽,承接卡槽设置在上料杆上方,承接卡槽和上料卡槽呈阶梯状依次向上设置,承接卡槽高于拉伸板上底端的上拉伸卡槽,承接卡槽和平移板上底端的下料卡槽相平齐。
13.进一步的,机架上设置有控制器、高速触发件和低速触发件,高速触发件和低速触发件均与控制器信号连接,控制器与驱动装置控制连接,高速触发件和低速触发件与拉伸板相配合设置,拉伸板上升时触发高速触发件,拉伸板下降时触发低速触发件。
14.进一步的,机架上设置有上料触发件和下料触发件,下料触发件和上料触发件沿拉伸板升降轨迹从下至上依次设置在机架上,拉伸板降至最低点时触发下料触发件,拉伸板上升到最高点时触发上料触发件,上料触发件和下料触发件均与横向驱动装置信号连接。
15.进一步的,下料组件包括两根下料杆,两根下料杆和两根上料杆对称的设置在两个拉伸板的两侧,两根下料杆上端均设置有叉口,两根下料杆均滑动连接在机架上。
16.进一步的,拉伸板与位于拉伸板两侧的上料杆和下料杆均传动连接,拉伸板的两侧分别转动连接有传动齿轮,上料杆和下料杆上均设置有齿链,机架上对应两个传动齿轮分别设置有固定点,齿链远离上料杆和下料杆的一端均绕过传动齿轮与固定点相连,传动齿轮与齿链啮合连接。
17.挂面自动拉伸机使用方法,
18.s1:将两根挂面杆依次放置在两个相邻的放置槽中,打开驱动装置和横向驱动装置,驱动装置带动传送链条进行输送使第一根挂面杆位于限位板下方,第二根挂面杆位于上料杆上方的放置槽中,驱动装置带动拉伸板沿升降杆进行升降,横向驱动装置带动平移板横向移动;
19.s2:拉伸板在最低点时触发下料触发件,下料触发件向横向驱动装置发出信号,横向驱动装置接收到下料触发件信号后驱动平移板沿传送链条输送方向移动,平移板上底端的下料卡槽在移动后位于下料杆上方,承接卡槽位于拉伸板底端的上拉伸卡槽上方;此时,拉伸板在驱动装置的带动下到达最低点时开始上升并触发高速触发件,高速触发件向控制器发出信号,控制器接收到高速触发件信号后对驱动装置发出高速运转信号,驱动装置接收到控制器的高速运转信号后驱动拉伸板快速上升,拉伸板上升时带动两根上料杆和两个下料杆一同上升,两根上料杆在上升时将放置槽内的第二根挂面杆顶起并使第二根挂面杆高于承接卡槽;
20.s3:拉伸板在驱动装置带动下上升到最高点时触发上料触发件,上料触发件向横向驱动装置发出信号,横向驱动装置接收到上料触发件信号后驱动平移板沿传送链条输送方向反向移动,平移板上的承接卡槽在移动后位于上料杆上方;此时,第二根挂面杆位于承接卡槽上方,拉伸板在驱动装置的带动下到达最高点时开始下降并触发低速触发件,低速触发件向控制器发出信号,控制器接收到低速触发件信号后对驱动装置发出低速运转信号,驱动装置接收到控制器的低速运转信号后驱动拉伸板缓慢下降,拉伸板下降时带动两根上料杆和两个下料杆一同下降,两根上料杆在下降时经过承接卡槽,承接卡槽将挂面杆进行承接使挂面杆离开两根上料杆,完成第一次拉伸;
21.s4:依次重复s1、s2和s3,在传送链条上不断的依次放入两根挂面杆,两根挂面杆在上料杆的作用下位于限位板外的挂面杆不断移动到平移板上,通过平移板的不断平移和拉伸板的不断升降使平移板上挂面杆不断的沿传送链条的输送方向进行移动,进行拉伸;
22.s5:在平移板上的挂面杆完成最后一次拉伸移动到平移板上底端的下料卡槽上时,拉伸板降至最低点触发下料触发件,下料触发件向横向驱动装置发出信号,横向驱动装置接收到下料触发件信号后驱动平移板沿传送链条输送方向移动,平移板上底端的下料卡槽连同挂面杆在移动后位于下料杆上方;此时,拉伸板在驱动装置的带动下到达最低点时开始上升并触发高速触发件,高速触发件向控制器发出信号,控制器接收到高速触发件信号后对驱动装置发出高速运转信号,驱动装置接收到控制器的高速运转信号后驱动拉伸板快速上升,拉伸板上升时带动两根上料杆和两个下料杆一同上升,两根下料杆在上升时将平移板底端的下料卡槽内的挂面杆顶起并使挂面杆高于平移板底端的下料卡槽;
23.s6:拉伸板在驱动装置带动下上升到最高点时触发上料触发件,上料触发件向横向驱动装置发出信号,横向动装置接收到上料触发件信号后驱动平移板沿传送链条输送方向反向移动,平移板上的承接卡槽在移动后位于上料杆上方;此时,下料杆上的挂面杆位于传送链条上方,拉伸板在驱动装置的带动下到达最高点时开始下降并触发低速触发件,低速触发件向控制器发出信号,控制器接收到低速触发件信号后对驱动装置发出低速运转信号,驱动装置接收到控制器的低速运转信号后驱动拉伸板缓慢下降,拉伸板下降时带动两根上料杆和两个下料杆一同下降,两根下料杆在下降后位于传送链条下方,传送链条将挂面杆进行承接使挂面杆离开两根下料杆,完成拉伸。
24.本发明所取得的显著有益效果:
25.1.本发明挂面自动拉伸机,包括机架,机架上设置有驱动装置、传送链条、上料组件、下料组件、升降组件和平移组件,传送链条水平设置在机架上,上料组件和下料组件沿传送链条输送方向依次设置在传送链条下方,升降组件和平移组件均设置在传送链条上方,传送链条用于输送物料,上料组件用于将传送链条上物料输送至平移组件上,平移组件和升降组件相配合物料进行拉伸和传送,下料组件用于将平移组件上完成拉伸的物料输送至传送链条上,机架倾斜设置。本技术通过将物料(挂面杆)放置在传送链条上,并通过驱动装置、传送链条、上料组件、下料组件、升降组件和平移组件的相互配合完成对挂面的拉伸,有效解决挂面需要人工进行拉伸的问题。
26.2.传送面条为两个且对称设置是为了方便对挂面杆的两端进行承接,放置槽的设置用于将两根挂面杆进行分开,方便上料组件对物料进行传递;限位板的设置用于对位于下方的挂面杆进行限位,避免在拉伸过程中两根挂面杆一同移动;承接板的设置用于对经
过拉伸的挂面进行承接,避免经过拉伸变长的挂面散落;传送链条水平设置在机架上,而机架倾斜设置,所以传送链条也随之倾斜,机架倾斜的设置可以使两根挂面杆之间的挂面在拉伸后呈u形下落,避免挂面脱离挂面杆影响下次拉伸。
27.3.两根上料杆位于传送链条下方且位于放置槽下方可以方便对放置槽内的挂面杆顶起,两根挂面杆滑动连接在机架上可以对上料杆的移动起到一定的限位作用,避免上料杆偏移。
28.4.两个升降杆的设置可以方便驱动装置驱动两个拉伸板在机架上进行升降,拉伸板上的上拉伸卡槽和下拉伸卡槽用于对挂面杆进行承接,上拉伸卡槽呈阶梯状上升的设置可以使挂面进行逐级拉伸,下拉伸卡槽呈阶梯状向下的设置可以方便挂面在拉伸结束后逐渐下降离开拉伸板;拉伸段数量为一个,相邻拉伸段上的上拉伸卡槽之间的高度差逐渐降低的设置可以逐渐减少对挂面的拉伸长度,避免挂面在变长后大幅度拉伸发生断裂的情况。
29.5.横向驱动装置和两个平移板的设置,用于对传送链条上的挂面杆沿传送链条的输送方向进行传送,平移板上设有与上拉伸卡槽和下拉伸卡槽相对应的上料卡槽和下料卡槽,且平移板上还设有用于对挂面杆进行承接的承接卡槽,通过承接卡槽对上料杆上的挂面杆进行承接后,通过平移板的平移和拉伸板的升降使平移板上的挂面杆不断进行拉伸和移动,再经由下料组件将平移板上的挂面杆重新送回传送链条上。
30.6.控制器、高速触发件和低速触发件的设置可以对挂面的拉伸速度进行控制,由于挂面在拉伸过程中不能匀速进行拉伸,挂面匀速拉伸容易导致挂面粗细不均匀、断裂,所以在机架上设有通过拉伸板升降来触发的高速触发件和低速触发件,拉伸板在上升时触发高速触发件,高速触发件随之对控制器发出信号,控制器在收到高速触发件信号后对驱动装置发出高速运行信号,驱动装置收到控制器的信号后带动拉伸板快速上升,通过拉伸板带动挂面杆的快速上升来使挂面快速上升,通过挂面杆的快速上升使挂面均匀拉伸,在拉伸板到达最高点后触发低速触发件,低速触发件随之对控制器发出信号,控制器在收到低速触发件信号后对驱动装置发出低速运行信号,驱动装置收到控制器的信号后带动拉伸板缓慢下降,通过拉伸板缓慢下降的设置给快速拉伸后的挂面一个缓冲空间,方便下次进行拉伸。
31.7.为了方便平移板与拉伸板之间进行相互配合,在机架上沿拉伸板的升降轨迹安装有上料触发件和下料触发件,通过拉伸板的升降来分别触发上料触发件和下料触发件,上料触发件和下料触发件与横向驱动装置信号连接的设置可以在横向驱动装置收到信号后驱动平移板进行移动。
32.8.两根下料杆的设置和两根上料杆对称的设在拉伸板两侧的设置可以方便对平移板上底端的下料卡槽上的挂面杆进行传递。
33.9.为了方便上料杆、下料杆、拉伸板和平移板之间的相互配合,拉伸板与两根上料杆和两根下料杆传动连接,通过拉伸板的升降来带动两根上料杆和两根下料杆一同上升和下降,方便两根上料杆进行上料,方便两根下料杆进行下料。
34.综上所述,本技术通过传送链条、上料组件、平移板、拉伸板和下料组件的相互配合,完成对挂面的多次拉伸,可以一次多组挂面进行拉伸,实现流水化作业,且通过拉伸板的快速上升和缓慢下降来模仿工人对挂面的拉伸过程,由于拉伸板的行程轨迹固定、上升
速度快且固定和下降速度快且固定,所以通过本技术对挂面进行拉伸后,品质大致相同,提高了生产效率,降低了人工强度,无需人工对挂面进行往复拉伸,有效解决了挂面需要人工进行往复拉伸的问题。
附图说明
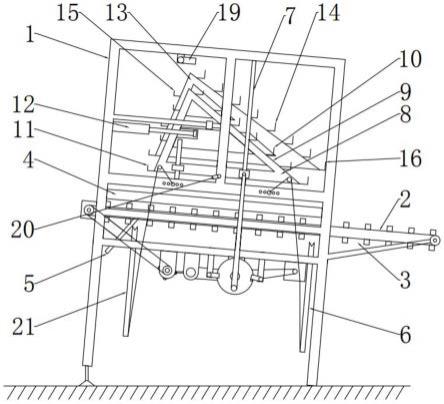
35.附图1为本发明实施例1挂面自动拉伸机主视结构示意图;
36.附图2为本发明实施例1挂面自动拉伸机局部结构示意图;
37.附图3为本发明实施例1挂面自动拉伸机剖视结构示意图;
38.附图4为本发明实施例2挂面自动拉伸机中平移板和拉伸板结构示意图;
39.附图5为本发明实施例3挂面自动拉伸机主视结构示意图。
40.在附图中,1-机架、2-传送链条、3-放置槽、4-限位板、5-承接板、6-上料杆、7-升降杆、8-拉伸板、9-拉伸段、10-上拉伸卡槽、11-下拉伸卡槽、12-横向驱动装置、13-平移板、14-上料卡槽、15-下料卡槽、16-承接卡槽、17-高速触发件、18-低速触发件、19-上料触发件、20-下料触发件、21-下料杆、22-传动齿轮、23-齿链、24-固定点、25-驱动电机、26-传动轴、27-中转杆、28-连接轴、29-间歇轮、30-曲柄连杆机构、31-触发板、32-第一拉伸段、33-第二拉伸段、34-直线电机。
具体实施方式
41.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
42.需要说明的是在本技术中高速触发件、低速触发件、上料触发件和下料触发件均为行程开关;物料包括带有挂面的两根挂面杆。
43.实施例1
44.如图1、图2和图3所示,挂面自动拉伸机,包括机架1,机架1为框架结构,机架1上设置有驱动装置、传送链条2、上料组件、下料组件、升降组件和平移组件,传送链条2水平安装在在机架1上,传送链条2与机架1底端相平行,上料组件和下料组件沿传送链条2输送方向依次设置在传送链条2下方,升降组件和平移组件均设置在传送链条2上方,传送链条2用于输送带有挂面的挂面杆,上料组件用于将传送链条2上两根挂面杆中后面的挂面杆输送至平移组件上,平移组件通过平移将挂面杆沿传送链条2输送方向进行传送,升降组件用于对平移组件上挂面杆进行拉伸,下料组件用于将平移组件上挂面杆输送至传送链条2上,在使用时机架1倾斜放置,所以传送链条2随之倾斜,下料组件设置在传送链条2倾斜向上的一端下方,传送链条2和升降组件均与驱动装置传动连接,驱动装置用于驱动传送链条2和升降组件进行运转。
45.进一步的,传送链条2上均匀设置有数量至少为两个的放置槽3,传送链条2的数量为两个,两个传送链条2对称的转动连接在机架1上,两个传送链条2的设置用于方便对挂面杆的两端进行承接,放置槽3的设置用于将两根挂面杆进行分别放置,机架1上设置有位于
传送链条2上方的限位板4,限位板4位于传送链条2和升降组件之间,限位板4的设置用于将两根挂面杆中位于传送链条2上的一根挂面杆进行限位,避免升降组件在对挂面进行拉伸时,两根挂面杆一同升降;传送链条2倾斜向下的一端延伸至机架1外侧,传送链条2延伸出机架1的设置可以方便对挂面杆进行放置;两个传送链条2之间设置有承接板5,承接板5两侧分别与机架1固定连接,承接板5的设置可以方便对拉伸后变长的挂面进行承接,避免挂面散乱;机架1连同传送链条2的倾斜设置可以是拉伸后的挂面在下降时呈u形下降,可以避免挂面脱离挂面杆和挂面发生散乱;在本实施例中驱动装置包括驱动电机25、传送链、传动轴26和连接轴28,驱动电机25安装在机架1上,驱动电机25的输出轴上安装有与传送链啮合连接的第一齿轮,传动轴26和连接轴28相平行的转动连接在机架1上,传动轴26上安装有与传送链啮合连接的第二齿轮,驱动电机25的输出轴通过转动带动传动轴26进行转动,连接轴28安装在两个传送链条2中间用于同时带动两个传送链条2同步转动,连接轴28上安装有间歇轮29,为了方便传动轴26和连接轴28进行连接和整体布局,在传动轴26和连接轴28之间设有中转杆27,中转杆27转动连接在机架1上,传动轴26通过链条和中转杆27传动连接,中转杆27上安装有与间歇轮29传动连接的传动杆,传动轴26在转动时带动中转杆27进而带动传动杆使连接轴28间歇转动,进而使传送链条2间歇转动。
46.进一步的,上料组件包括两根上料杆6,两根上料杆6分别设置在两个传送链条2的下方且位于放置槽3下方,两根上料杆6上端均设置有用于将挂面杆顶起的叉口,机架1上固定连接有滑块,两根上料杆6均通过与滑块滑动连接来滑动连接在机架1上,上料杆6垂直于传送链条2输送方向设置,传送链条2的间歇转动可以方便上料杆6对放置槽3内的挂面杆顶起。
47.进一步的,升降组件包括两个升降杆7和两个拉伸板8,驱动装置与两个拉伸板8传动连接,在本实施例中驱动装置还包括两个曲柄连杆机构30,曲柄连杆机构30包括偏心轮和一端转动连接在偏心轮上的曲柄,两个曲柄连杆机构30中的偏心轮分别位于传动轴26的两端,两个曲柄的另一端均与拉伸板8转动连接,两根升降杆7分别设置在机架1的两侧且垂直于传送链条2设置,两个拉伸板8对称的设置在传送链条2上方,驱动装置中的驱动电机25通过与曲柄连杆机构30的联动来驱动两个拉伸板8沿两个升降杆7升降,拉伸板8与升降杆7滑动连接;拉伸板8上端沿机架1倾斜向上方向依次设置有拉伸段9和下拉伸卡槽11,拉伸段9的数量至少为一个,在本实施例中拉伸段9的数量为一个,拉伸段9上呈阶梯状设置有依次上升的上拉伸卡槽10,上拉伸卡槽10和下拉伸卡槽11的数量均至少为两个,下拉伸卡槽11呈阶梯状依次下降,拉伸板8底端的上拉伸卡槽10与拉伸板8底端的下拉伸卡槽11相平齐,拉伸板8底端与传送链条2平行,上拉伸卡槽10呈阶梯状依次上升的设置一方面可以适用上一次拉伸挂面后的长度,另一方面可以进一步对挂面的长度进行拉伸;下拉伸卡槽11呈阶梯状依次下降可以方便拉伸完成的挂面杆逐渐降低高度离开拉伸板8,下拉伸卡槽11之间的高度差大于上拉伸卡槽10之间的高度差可以方便挂面杆快速下降来离开拉伸板8。
48.进一步的,平移组件包括横向驱动装置12和两个平移板13,横向驱动装置12为可以使平移板13进行横向移动的装置,横向驱动装置12可以为电动推杆或油缸,在本实施例中横向驱动装置12包括气缸,在本实施例中横向驱动装置12的数量为两个,横向驱动装置12平行于传送链条2设置在机架1上,两个平移板13对称的设置在传送链条2上方,两个横向驱动装置12与两个平移板13对应的传动连接,两个横向驱动装置12用于驱动两个平移板13
横向移动,平移板13移动方向平行于传送链条2输送方向,为了方便横向驱动装置12带动平移板13进行移动,机架1的两侧均设有平行于传送链条2的横杆,两根平移板13分别于两根横杆滑动连接,横向驱动装置12驱动平移板13沿横杆进行移动,两个平移板13与两个拉伸板8上下错位设置且两个平移板13高于两个拉伸板8,两个平移板13位于两个拉伸板8之间,平移板13上设置有与上拉伸卡槽10和下拉伸卡槽11相对应的上料卡槽14和下料卡槽15,上料卡槽14远离下料卡槽15的一侧延伸设有承接卡槽16,承接卡槽16设置在上料杆6上方,承接卡槽16和上料卡槽14呈阶梯状依次向上设置,承接卡槽16高于拉伸板8上底端的上拉伸卡槽10,承接卡槽16和平移板13上底端的下料卡槽15相平齐,平移板13底端与传送链条2平行。
49.进一步的,为了对挂面进行均匀拉伸,机架1上设置有控制器、高速触发件17和低速触发件18,高速触发件17和低速触发件18均与控制器信号连接,控制器与驱动装置控制连接,高速触发件17和低速触发件18与拉伸板8相配合设置,拉伸板8上升时触发高速触发件17,拉伸板8下降时触发低速触发件18;拉伸板8在上升时会对挂面杆顶起进而对挂面进行拉伸,所以在机架1上设置有高速触发件17来在拉伸板8上升时来进行触发,在本实施例中高速触发件17和低速触发件18以传动轴26为中心对称的设置在偏心轮两侧,在偏心轮上设有用于触发高速触发件17和低速触发件18的触发板31,在曲柄连杆机构30带动拉伸板8下降时触发板31触发低速触发件18进而使低速触发件18向控制器发出信号,控制器在收到低速触发件18的信号后控制驱动装置带动曲柄连杆机构30缓慢转动进而带动拉伸板8缓慢下降,拉伸板8在下降后需要上升时由于偏心轮的转动触发板31触发高速触发件17,高速触发件17向控制器发出信号,控制器在收到高速触发件17的信号后控制驱动装置带动曲柄连杆机构30快速转动进而带动拉伸板8快速上升,通过拉伸板8的快速上升来使挂面均匀拉伸,如果拉伸板8缓慢或匀速上升会导致挂面中间细两边粗得不到均匀拉伸,影响挂面的品质,而拉伸板8的缓慢下降会让被拉伸的挂面得到一个缓冲时间,使挂面缓慢恢复来方便进行再次拉伸。
50.进一步的,机架1上沿拉伸板8升降轨迹从下至上依次设置有下料触发件20和上料触发件19,拉伸板8在最低点时触发下料触发件20后,下料触发件20对横向驱动装置12发出信号,横向驱动装置12接收下料触发件20信号后驱动平移板13沿传送链条2输送方向进行移动使平移板13上底端的下料卡槽15位于下料组件上方方便进行下料,拉伸板8在最高点时触发上料触发件19后,上料触发件19会对横向驱动装置12发出信号,横向驱动装置12接收到上料触发件19信号后驱动平移板13沿传送链条2输送方向相反的方向移动使平移板13上承接卡槽16重新对挂面杆进行承接,作为本领域技术人员公知的限位开关和结合本实施例中横向驱动装置12为气缸,本领域人员理应想到上料触发件19和下料触发件20被触发后使如何使横向驱动装置12进行连接的,如通过电磁阀;通过拉伸板8触发上料触发件19和下料触发件20来控制平移板13的移动,可以方便拉伸板8和平移板13两者之间相互配合,较少了控制机构的增加了,简化了设备的复杂程度。
51.进一步的,下料组件包括两根下料杆21,两根下料杆21和两根上料杆6对称的设置在拉伸板8的两侧,由于平移板13壁拉伸板8突出一个承接卡槽16,而上料杆6位于承接卡槽16下方,所以上料杆6和下料杆21对称的设置可以在平移板13移动后,平移板13上底端的下料卡槽15位于两根下料杆21上方,方便两根下料杆21对下料卡槽15上的挂面杆取下,两根
下料杆21上端均设有用于将挂面杆叉起的叉口,两根机架1均滑动连接在机架1上;两根上料杆6和两根下料杆21相互平行且长度方向均垂直于传送链条2的输送方向。
52.进一步的,为了方便对上料杆6和下料杆21配合完成上下料,拉伸板8与位于拉伸板8两侧的上料杆6和下料杆21均传动连接,拉伸板8两侧分别转动连接有传动齿轮22,上料杆6和下料杆21的底端均固定连接有齿链23,机架1上位于两个传动齿轮22之间分别对应两个传动齿轮22设有固定点24,固定点24的数量可以为一个或多个,齿链23远离上料杆6和下料杆21的一端均绕过相邻的传动齿轮22和固定点24相连,在拉伸板8上升或下降时,拉伸板8上的传动齿轮22随之升降,在传动齿轮22升降过程中由于齿链23的存在两根上料杆6和两根下料杆21会随之一起上升或下降,达到联动的目的,方便进行配合完成上下料;需要注意的是两根上料杆6和两根下料杆21并不位于平移板13或拉伸板8的垂直下方,而是稍微偏移,这样可以在对挂面杆进行叉起的同时可以方便的将挂面杆放置在移动板上。
53.本发明还公开了挂面自动拉伸机使用方法,
54.步骤一:将两根挂面杆依次放置在两个相邻的放置槽3中,打开驱动装置和横向驱动装置12,驱动装置带动传送链条2进行输送使第一根挂面杆位于限位板4下方,第二根挂面杆位于上料杆6上方的放置槽3中,驱动装置带动拉伸板8沿升降杆7进行升降,横向驱动装置12带动平移板13横向移动;
55.步骤二:拉伸板8在最低点时触发下料触发件20,下料触发件20向横向驱动装置12发出信号,横向驱动装置12接收到下料触发件20信号后驱动平移板13沿传送链条2输送方向移动,平移板13上底端的下料卡槽15在移动后位于下料杆21上方,承接卡槽16位于拉伸板8底端的上拉伸卡槽10上方;此时,拉伸板8在驱动装置的带动下到达最低点时开始上升并触发高速触发件17,高速触发件17向控制器发出信号,控制器接收到高速触发件17信号后对驱动装置发出高速运转信号,驱动装置接收到控制器的高速运转信号后驱动拉伸板8快速上升,拉伸板8上升时带动两根上料杆6和两个下料杆21一同上升,两根上料杆6在上升时将放置槽3内的第二根挂面杆顶起并使第二根挂面杆高于承接卡槽16;
56.步骤三:拉伸板8在驱动装置带动下上升到最高点时触发上料触发件19,上料触发件19向横向驱动装置12发出信号,横向动装置接收到上料触发件19信号后驱动平移板13沿传送链条2输送方向反向移动,平移板13上的承接卡槽16在移动后位于上料杆6上方;此时,挂面杆位于承接卡槽16上方,拉伸板8在驱动装置的带动下到达最高点时开始下降并触发低速触发件18,低速触发件18向控制器发出信号,控制器接收到低速触发件18信号后对驱动装置发出低速运转信号,驱动装置接收到控制器的低速运转信号后驱动拉伸板8缓慢下降,拉伸板8下降时带动两根上料杆6和两个下料杆21一同下降,两根上料杆6在下降时经过承接卡槽16,承接卡槽16将第二根挂面杆进行承接使挂面杆离开两根上料杆6,完成第一次拉伸,两根上料杆6和两根下料杆21在拉伸板8的带动下下降到传送链条2后,传动轴26上的传动杆刚好与间歇轮29相配合使传送链条2进行一次传送,传送链条2在移动后刚好使下一组两根挂面杆中一根挂面杆位于限位板4下,另一根位于上料杆6上方;
57.步骤四:依次重复s1、s2和s3,在传送链条2上不断的依次放入两根挂面杆,两根挂面杆在上料杆6的作用下位于限位板4外的挂面杆不断移动到平移板13上,通过平移板13的不断平移和拉伸板8的不断升降使平移板13上挂面杆不断的沿传送链条2的输送方向进行移动,进行拉伸;
58.步骤5:在平移板13上的挂面杆完成最后一次拉伸移动到平移板13上底端的下料卡槽15上时,拉伸板8降至最低点触发下料触发件20,下料触发件20向横向驱动装置12发出信号,横向驱动装置12接收到下料触发件20信号后驱动平移板13沿传送链条2输送方向移动,平移板13上底端的下料卡槽15连同挂面杆在移动后位于下料杆21上方;此时,拉伸板8在驱动装置的带动下到达最低点时开始上升并触发高速触发件17,高速触发件17向控制器发出信号,控制器接收到高速触发件17信号后对驱动装置发出高速运转信号,驱动装置接收到控制器的高速运转信号后驱动拉伸板8快速上升,拉伸板8上升时带动两根上料杆6和两个下料杆21一同上升,两根下料杆21在上升时将平移板13底端的下料卡槽15内的挂面杆顶起并使挂面杆高于平移板13底端的下料卡槽15;
59.步骤6:拉伸板8在驱动装置带动下上升到最高点时触发上料触发件19,上料触发件19向横向驱动装置12发出信号,横向动装置接收到上料触发件19信号后驱动平移板13沿传送链条2输送方向反向移动,平移板13上的承接卡槽16在移动后位于上料杆6上方;此时,下料杆21上的挂面杆位于传送链条2上方,拉伸板8在驱动装置的带动下到达最高点时开始下降并触发低速触发件18,低速触发件18向控制器发出信号,控制器接收到低速触发件18信号后对驱动装置发出低速运转信号,驱动装置接收到控制器的低速运转信号后驱动拉伸板8缓慢下降,拉伸板8下降时带动两根上料杆6和两个下料杆21一同下降,两根下料杆21在下降后位于传送链条2下方,传送链条2将挂面杆进行承接使挂面杆离开两根下料杆21,完成拉伸。
60.综上,在本技术中一个驱动装置即可带动传送链条2和拉伸板8进行移动,而通过拉伸板8的移动来反向对驱动装置进行控制完成对挂面的自动差速拉伸,同时拉伸板8的移动又可以对平移板13和上料组件和下料组件进行联动或控制,结构紧凑,通过各个部件相互之间联动、相互之间触发的关系来使各个步骤之间衔接顺畅,避免了增加过多的控制组件,减少了出错几率;本技术通过通过传送链条2、上料组件、平移板13、拉伸板8、下料组件和驱动装置相配合完成对挂面的自动差速拉伸,得到品质和粗细大致相同的挂面,提高了生产效率,降低了人工强度,有效解决了在生产拉面的拉伸工序中耗费大量人工的问题。
61.实施例2
62.如图4所示,本实施例与实施例1的结构大致相同,本实施例在实施例1的基础上提出另外实施方式,本实施例与实施例1不同的是,在本实施例中拉伸段9的数量为至少两个,两个拉伸段9包括沿传送链条2输送方向依次上升设置的第一拉伸段32和第二拉伸段339,第一拉伸段32上设置有两个上拉伸卡槽10,两个上拉伸卡槽10之间的距离和高度差相同,第二拉伸段339上设置有同样的设有两个上拉伸卡槽10,两个上拉伸卡槽10之间的距离和高度差相同,上述上拉伸卡槽10之间的距离相同,但是第二拉伸段339上两个上拉伸卡槽10之间的高度差小于第一拉伸段32上两个上拉伸卡槽10之间的高度差,随着不同拉伸段9的依次上升,以此类推,随着拉伸段9数量的增加,拉伸段9上之间的上拉伸卡槽10之间的高度差随之递减,通过对不同拉伸段9上上拉伸卡槽10之间的高度差逐渐递减的设置可以使挂面进行逐渐拉伸,随着挂面长度逐渐变长,拉伸程度逐渐变小,避免挂面断裂。
63.实施例3
64.如图5所示,本实施例提出另外本技术的另外实施方式,本实施例和实施例1的结构大致相同,本实施例与实施例1不同的是,在本实施例中两根上料杆6和两根下料杆21通
过直线电机34滑动连接在机架1上,直线电机34的数量为四个且分别对应两根上料杆6和两根下料杆21设置,直线电机34的输出端和上料杆6或下料杆21对应的固定连接,通过直线电机34输出端的移动来驱动上料杆6和下料杆21进行移动,在使用时可以将直线电机34和控制器相连来方便进行控制。
65.目前,本技术的技术方案已经进行了中试,即产品在大规模量产前的小规模实验;中试完成后,在小范围内开展了用户使用调研,调研结果表明用户满意度较高;现在已开始着手准备产品正式投产进行产业化(包括知识产权风险预警调研)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1