一种集成红外感应的茶叶定高渥堆机器人及其渥堆方法
本发明涉及一种集成红外感应的茶叶定高渥堆机器人及其渥堆方法。
背景技术:
1、渥堆属于黑茶制造中特有的发酵工艺,从微生物学角度上说,渥堆的原理是通过微生物胞外酶主导下的生化动力以及热主导下的物化动力使茶叶成分发生一系列复杂化学变化,形成黑茶特有的风味。
2、渥堆的具体流程是将茶叶堆放成70里面左右高度后进行洒水,然后覆盖麻布,促进茶叶酵素作用的进行,使之在湿热环境下发酵,发酵完全后,再摊开来晾干。经过渥堆的茶叶,因渥堆程度的差异,颜色呈现栗褐色;发酵的过程中,茶叶由绿转为黄色、再由黄色转为栗红色、栗黑色、栗褐色。
3、然后目前在产业上进行渥堆处理基本上均是人工渥堆,锥堆的锥度较大,导致锥堆内部的茶叶无法及时吸热,同时,处于锥堆最深处的茶叶无法与环境空气有效接触,导致发酵不完全;呈现的结果就是渥堆的茶叶成色右外至里的颜色逐渐浅化,发酵不完全。
技术实现思路
1、本发明的目的在于提供一种集成红外感应的茶叶定高渥堆机器人及其渥堆方法,以解决上述背景技术中提出的渥堆锥度过小导致的发酵不匀问题。
2、为实现上述目的,本发明提供如下技术方案:
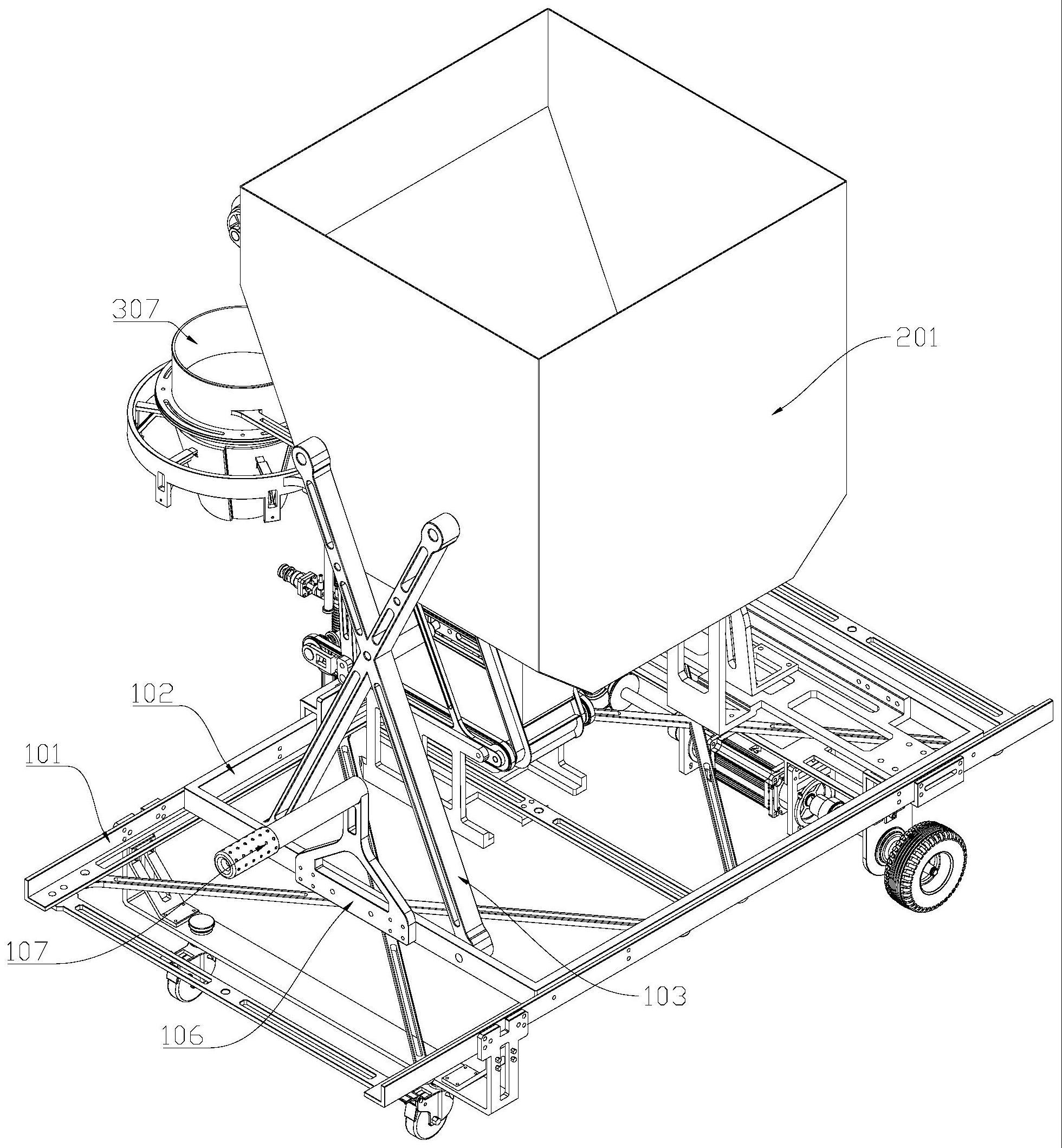
3、一种集成红外感应的茶叶定高渥堆机器人,包括:
4、基础架体结构;
5、箱体,箱体用于装载待渥堆的新鲜茶叶,箱体设置在基础架体结构之上;
6、提升机构,提升机构用于将箱体底部的茶叶向上输送至堆放机构中;
7、堆放机构,堆放机构与提升机构均设置在基础架体结构的一侧,堆放机构具有一个上口和一个下口,箱体底部的茶叶通过提升机构向上输送并从堆放机构的上口处落入到堆放机构之中,经堆放机构的下口排出;
8、其中,堆放机构与提升机构机械联锁,以使堆放机构的下口口径在提升机构向上输送茶叶的过程中不断减小。
9、如上的集成红外感应的茶叶定高渥堆机器人:基础架体结构靠近堆放机构的一侧还设置有红外感应模块,且在基础架体结构的下部设置了行走机构,行走机构和堆放机构均与红外感应模块通讯;
10、当经堆放机构渥堆的茶叶高度达到预定高度后,红外感应模块被触发,堆放机构反向动作,同时,行走机构驱动基础架体结构行走;其中,堆放机构反向动作使堆放机构的下口口径不断增加,直至达到初始数值;在堆放机构反向动作的过程中,提升机构与堆放机构脱联,并保持静止;
11、红外感应模块中包括了计时单元。
12、如上的集成红外感应的茶叶定高渥堆机器人:行走机构包括:
13、行走马达,行走马达安装在基础架体结构下方;在行走马达的两端均连接有行走轴,行走轴端部安装有移动轮,行走马达与红外感应模块及计时单元通讯;
14、万向轮,基础架体结构下方安装有底架,万向轮设置在底架的两侧;
15、基础架体结构包括机架和固定在机架上的围框,围框上固定有叉架和侧架;
16、箱体通过叉架和侧架固定设置在基础架体结构之上;
17、围框上还固定有支架,支架上固定有方向柄。
18、如上的集成红外感应的茶叶定高渥堆机器人:堆放机构包括:
19、锥桶,锥桶可竖直升降;
20、圆弧锥片组,圆弧锥片组滑动设置在锥桶的外表面,圆弧锥片组的锥度与锥桶的锥度相同;
21、其中,圆弧锥片组包括多个一号圆弧锥片和多个二号圆弧锥片,一号圆弧锥片和二号圆弧锥片间隔分布,且一号圆弧锥片的内径与二号圆弧锥片的外径相当;
22、一号圆弧锥片和二号圆弧锥片的外壁上部均水平固定设置有滑杆,滑杆与滑套滑动配合,滑套沿圆周等距分布在环箍上;环箍通过立架固定在基础架体结构上;
23、一号圆弧锥片的内壁中央设置有一号凸筋,锥桶的外壁上设置有用于同一号凸筋滑动配合的一号凹槽;
24、二号圆弧锥片的内壁中央设置有二号凸筋,锥桶的外壁上设置有用于同二号凸筋滑动配合的二号凹槽;
25、一号凸筋和二号凸筋的上端均设置有翼块,一号凹槽的两侧开设有一号轨道,二号凹槽的两侧开设有二号轨道,一号凸筋上端的翼块与一号轨道滑动配合,二号凸筋上端的翼块与二号轨道滑动配合。
26、如上的集成红外感应的茶叶定高渥堆机器人:堆放机构还包括安装在立架外侧的渥堆马达,渥堆马达的输出端连接有丝杠,丝杠与螺纹套筒螺纹配合,螺纹套筒的上部与升降台固定,且升降台上固定有圆桶;
27、圆桶与锥桶的上部同心固定,且升降台的两侧分别固定有轨杆,轨杆与立架的两侧滑动配合,渥堆马达与红外感应模块通讯。
28、如上的集成红外感应的茶叶定高渥堆机器人:提升机构包括固定设置在基础架体结构上的两个安装架,两个安装架之间转动设置有第一转辊、第二转辊、第三转辊、第四转辊、以及第五转辊;
29、第一转辊、第二转辊、第三转辊、第四转辊和第五转辊形成转辊组,在转辊组上设置有提升带,提升带上沿其宽度方向设置了多个防滑隔断,且多个防滑隔断等间距设置;在提升带的两侧设置有侧挡;
30、堆放机构与提升机构中的第五转辊建立机械联锁。
31、如上的集成红外感应的茶叶定高渥堆机器人:箱体的底部设置有出茶口,在出茶口和提升带之间还设置了包挡件;
32、包挡件靠近提升带的一面与提升带平行,包挡件安装于箱体的下部,且包挡件的下部设置有凹腔,凹腔的底部具有导向面,导向面垂直于提升带;
33、包挡件的下端设置了刮平面,刮平面贴合于防滑隔断的上缘,且刮平面沿提升带运行方向上的长度大于相邻两个防滑隔断的间距。
34、如上的集成红外感应的茶叶定高渥堆机器人:渥堆马达的输出端通过蜗杆连接丝杠,立架的下部安装有侧沿架,侧沿架上转动设置传动轴,传动轴中央安装有与蜗杆配合的蜗轮;
35、传动轴上套设有正三角齿圈和主动带轮,正三角齿圈的内壁上一体设置了固定键,传动轴的表面沿其轴线方向开设键槽,固定键与键槽滑动配合;
36、主动带轮的内壁设置一圈环形凹轨,环形凹轨与传动轴表面的凸环转动嵌合;主动带轮朝向正三角齿圈的一面同轴一体设置了反三角齿圈,反三角齿圈与正三角齿圈适配;
37、传动轴上还设置了一圈止挡阶梯,传动轴上套设有柱形弹簧,柱形弹簧的一端与止挡阶梯贴合,另一端与正三角齿圈贴合,主动带轮通过传动带与固定在第五转辊端部的被动带轮连接。
38、如上的集成红外感应的茶叶定高渥堆机器人:红外感应模块还包括安装在基础架体结构上的控制器、无线传输器、以及斜架,斜架;
39、计时单元包括安装在基础架体结构上的计时器,斜架上安装有红外探头,红外探头通过无线传输器与控制器通讯;
40、控制器分别与渥堆马达及行走马达单向通讯;渥堆马达和行走马达通过计时器与控制器建立反馈通讯。
41、一种采用如上所述的渥堆机器人进行渥堆的方法,包括如下步骤:
42、step1,空载运行拟合,在箱体中无茶叶时空载启动渥堆马达,检查圆弧锥片组在相互聚拢时是否会产生干涉,如若具有干涉,需对一号圆弧锥片和/或二号圆弧锥片进行矫形,以确保圆弧锥片组在相互聚拢时不干涉;
43、step2,茶叶装载,启动渥堆马达将圆弧锥片组调整到初始位置(锥桶达到其行程的最下端);向箱体中装入待渥堆的茶叶,检查红外探头的高度是否符合渥堆高度要求,同时,对出茶口、堆放机构的下口排放顺畅情况进行测试;
44、step3,灵敏度检测,在渥堆马达和行走马达未接电的情况下对红外探头、控制器、计时器、以及无线传输器之间的通讯灵敏度进行检查,模拟信号传输和反馈的迟滞时间值是否落入到正常的误差范围区间内;如若迟滞时间过长,则可对应地减少计时器的计时时长;
45、step4,启动渥堆,同时将渥堆马达、行走马达、控制器、红外探头、计时器、以及无线传输器接电进行渥堆;在第一锥堆成型后,通过人工检验锥堆的高度是否符合预期高度;如若不符,可适当地增加计时器的迟滞时间,直至锥堆高度达到预定高度;
46、step5,渥堆完成,在箱体中的茶叶全部排出后同时对渥堆马达、行走马达、控制器、红外探头、计时器、以及无线传输器断电,通过人工操控方向柄并推动整个机器,配合万向轮将其移至仓库。
47、与现有技术相比,本发明的有益效果是:本发明中利用提升机构不断向堆放机构中输送茶叶,茶叶从堆放机构的上口进入到堆放机构中后再从堆放机构的下口排出,且在渥堆的过程中,随着茶叶堆落于地面的高度增加,不断减小堆放机构的下口口径,使得渥堆的茶叶锥度更大,也即渥堆的茶叶锥堆更加尖锐;相同渥堆高度下,采用本发明中的机器人进行渥堆时,茶叶锥堆的横向厚度更小,有利于茶叶在湿热环境下茶叶酵素的发酵。
- 还没有人留言评论。精彩留言会获得点赞!