一种智能谷物灭菌除霉机搓揉辅助器的制作方法
本技术涉及谷物灭菌除霉机领域,尤其涉及一种智能谷物灭菌除霉机搓揉辅助器。
背景技术:
1、随着社会的发展人们生活质量的提高,现今对食品安全的要求越来越高越来越苛刻,粮食霉变产生的黄曲霉毒素b1和玉米赤霉烯酮(f-2毒素)等毒素对食品和饲料行业危害很高,同时,由于粮食储备及饲料行业等环境影响,收粮的标准要求越来越。
2、在谷物灭菌除霉机的运行过程中,需要使用到搓揉辅助器,现有的搓揉辅助器,无法调整搓揉间距,当人们在使用搓揉辅助器时,无法根据物料的加工需求,调整搓揉间距大小,进而不能增加搓揉力度,不方便人们使用。
3、因此,有必要提供一种智能谷物灭菌除霉机搓揉辅助器解决上述技术问题。
技术实现思路
1、本实用新型提供一种智能谷物灭菌除霉机搓揉辅助器,解决了现有的搓揉辅助器,无法调整搓揉间距,当人们在使用搓揉辅助器时,无法根据物料的加工需求,调整搓揉间距大小,进而不能增加搓揉力度,不方便人们使用的技术问题。
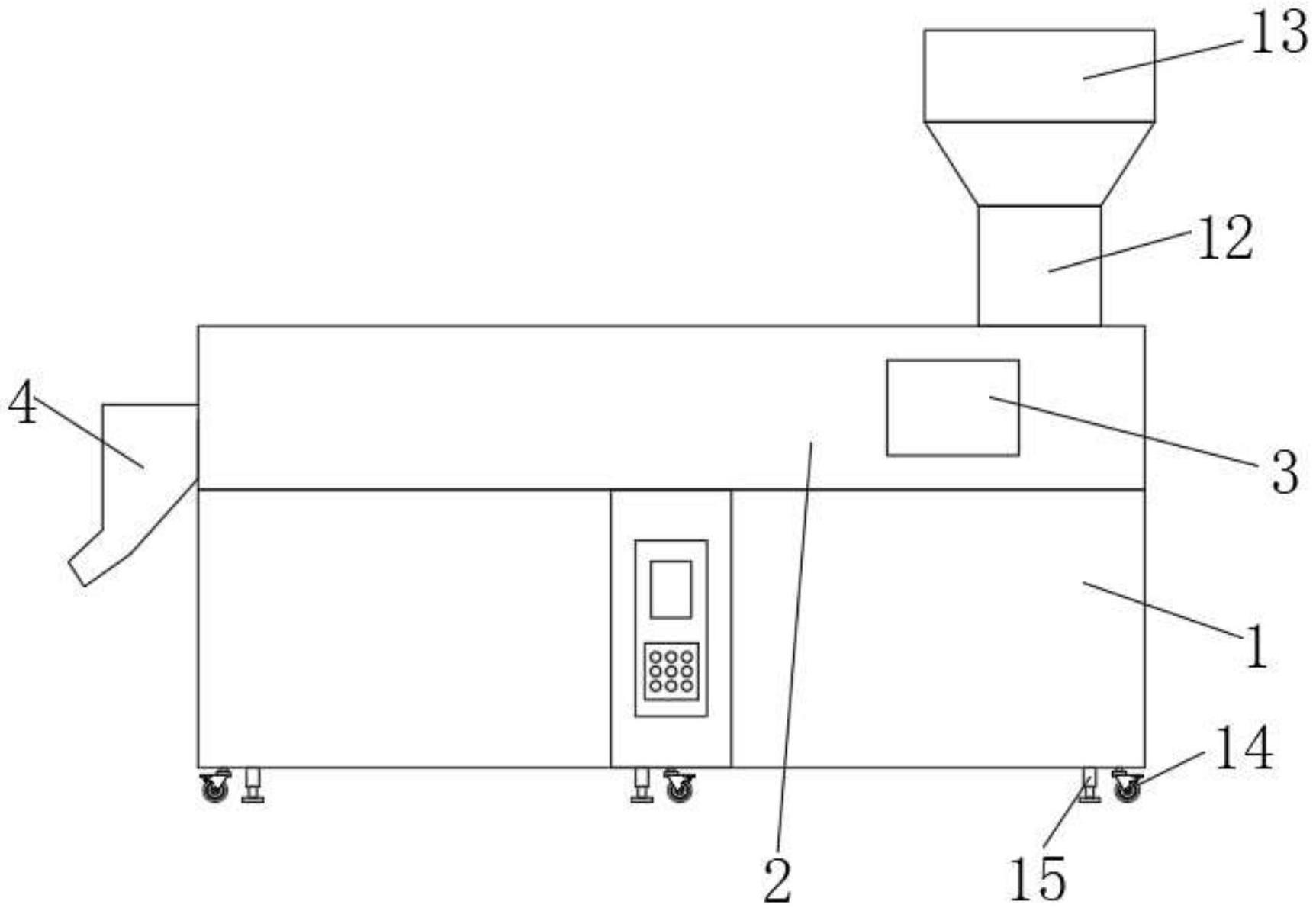
2、为解决上述技术问题,本实用新型提供的一种智能谷物灭菌除霉机搓揉辅助器,包括底座,所述底座的顶部固定连接有高温箱,所述高温箱正面的右侧固定连接有臭氧发生装置,所述高温箱左侧的底部连通有排料口,所述高温箱的内腔设置有刷滚,所述刷滚包括驱动马达,所述底座内腔底部的两侧均固定连接有步进电机,所述步进电机的输出端固定连接有螺杆,所述螺杆的表面螺纹连接有螺纹块,所述螺纹块的内侧固定连接有承载板,所述承载板的顶部固定连接有顶杆,所述顶杆的顶部贯穿至高温箱的内腔并固定连接有顶板。
3、优选的,所述高温箱顶部的右侧连通有进料口,所述进料口的顶部连通有料斗。
4、优选的,所述底座底部的四周固定连接有万向轮,所述底座底部的前侧和后侧均固定连接有支撑脚。
5、优选的,所述螺杆的顶部套接有轴承座,所述轴承座的顶部与底座内腔的顶部固定连接。
6、优选的,所述底座内腔的两侧均开设有滑槽,所述滑槽的内腔滑动连接有滑块,所述滑块的内侧与螺纹块的外侧固定连接。
7、与相关技术相比较,本实用新型提供的一种智能谷物灭菌除霉机搓揉辅助器具有如下有益效果:
8、本实用新型提供一种智能谷物灭菌除霉机搓揉辅助器,当需要调整揉搓空间间距时,步进电机通过轴承座带动螺杆开始转动,螺杆转动带动螺纹块向上移动,螺纹块带动滑块在滑槽内滑动,同时螺纹块带动承载板向上移动。
9、本实用新型提供一种智能谷物灭菌除霉机搓揉辅助器,承载板带动顶杆向上移动,顶杆带动顶板向上移动,使顶杆与刷滚之间的间距移动至指定位置,进而可以控制刷滚的揉搓力度。
技术特征:
1.一种智能谷物灭菌除霉机搓揉辅助器,包括底座(1),其特征在于:所述底座(1)的顶部固定连接有高温箱(2),所述高温箱(2)正面的右侧固定连接有臭氧发生装置(3),所述高温箱(2)左侧的底部连通有排料口(4),所述高温箱(2)的内腔设置有刷滚(5),所述刷滚(5)包括驱动马达,所述底座(1)内腔底部的两侧均固定连接有步进电机(6),所述步进电机(6)的输出端固定连接有螺杆(7),所述螺杆(7)的表面螺纹连接有螺纹块(8),所述螺纹块(8)的内侧固定连接有承载板(9),所述承载板(9)的顶部固定连接有顶杆(10),所述顶杆(10)的顶部贯穿至高温箱(2)的内腔并固定连接有顶板(11)。
2.根据权利要求1所述的一种智能谷物灭菌除霉机搓揉辅助器,其特征在于,所述高温箱(2)顶部的右侧连通有进料口(12),所述进料口(12)的顶部连通有料斗(13)。
3.根据权利要求1所述的一种智能谷物灭菌除霉机搓揉辅助器,其特征在于,所述底座(1)底部的四周固定连接有万向轮(14),所述底座(1)底部的前侧和后侧均固定连接有支撑脚(15)。
4.根据权利要求1所述的一种智能谷物灭菌除霉机搓揉辅助器,其特征在于,所述螺杆(7)的顶部套接有轴承座(16),所述轴承座(16)的顶部与底座(1)内腔的顶部固定连接。
5.根据权利要求1所述的一种智能谷物灭菌除霉机搓揉辅助器,其特征在于,所述底座(1)内腔的两侧均开设有滑槽(17),所述滑槽(17)的内腔滑动连接有滑块(18),所述滑块(18)的内侧与螺纹块(8)的外侧固定连接。
技术总结
本技术公开了一种智能谷物灭菌除霉机搓揉辅助器,涉及谷物灭菌除霉机领域。一种智能谷物灭菌除霉机搓揉辅助器,包括底座,所述底座的顶部固定连接有高温箱,所述高温箱正面的右侧固定连接有臭氧发生装置,所述高温箱左侧的底部连通有排料口,所述高温箱的内腔设置有刷滚,所述刷滚包括驱动马达,所述底座内腔底部的两侧均固定连接有步进电机,所述步进电机的输出端固定连接有螺杆,所述螺杆的表面螺纹连接有螺纹块。本技术提供一种智能谷物灭菌除霉机搓揉辅助器,当需要调整揉搓空间间距时,步进电机通过轴承座带动螺杆开始转动,螺杆转动带动螺纹块向上移动,螺纹块带动滑块在滑槽内滑动,同时螺纹块带动承载板向上移动。
技术研发人员:李强国
受保护的技术使用者:青岛佳颐制粉有限公司
技术研发日:20230317
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!