一种复杂作业场景探测头盔装置及应用方法
本发明涉及复杂场景环境探测,具体而言,涉及一种复杂作业场景探测头盔装置及应用方法。
背景技术:
1、井下作业、救援等复杂作业场景中常存在粉尘弥漫、泥浆飞溅、烟雾遮挡、落石塌方等因素,常规光学照明手段作用范围有限,作业/救援人员无法有效感知前视区域风险、躲避顶部物体塌落,极大威胁人员的生命安全,也给社会安定造成诸多不利影响。场景中粉尘、泥浆、光线等因素容易造成光学图像、激光传感器失效,红外成像传感器在感知距离有限(<20m)、无法准确定位任务区域,常规探测传感器难以对场景进行全天时、全天候、全场景的立体观测;
2、常用的80ghz毫米波雷达具有距离(100m以内)和角度(±45°范围内)高分辨特性,在粉尘、泥浆和雨雾环境下依然能够保持优异的探测性能;通过天线集成、微波集成等技术,可实现模块化、小型化、低功率化(规避井下易燃气体风险),尤其适合复杂作业场景。
3、井下作业中头盔作为必备防护装具,考虑井下作业、救援场景的复杂性,如何利用头盔对作业场景进行立体感知、传输、分析和预警是目前亟待解决的问题。
技术实现思路
1、本发明要解决的技术问题是:
2、为了解决现有头盔在复杂作业场景下难以进行全天时、全天候和全场景的立体观测,且难以进行立体感知、传输、分析和预警的问题。
3、本发明为解决上述技术问题所采用的技术方案:
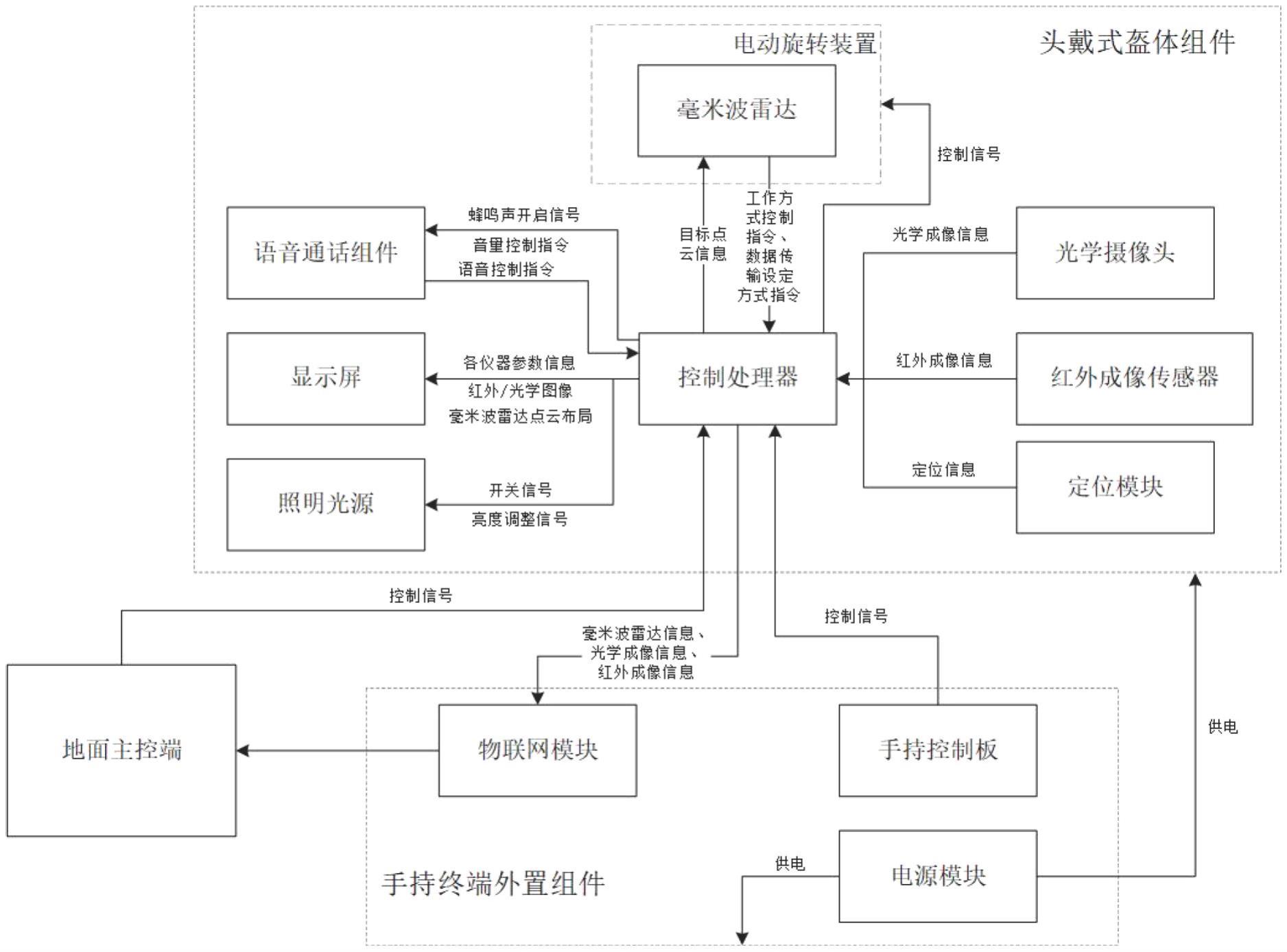
4、本发明提供了一种复杂作业场景探测头盔装置,包括头戴式盔体组件和手持终端外置组件,
5、所述头戴式盔体组件包括头盔主体,所述头盔主体的帽檐正上方中心处设有光源;头盔主体的顶部通过图像采集转轴连接有pcb电路板,所述pcb电路板上并排固定有光学摄像头与红外成像传感器;所述头盔主体的两侧对称设有毫米波雷达,所述毫米波雷达通过l型电动转轴与头盔主体连接,用于实现每侧的毫米波雷达可绕x轴方向旋转±90°,绕y轴方向旋转0°-90°;所述头盔主体帽檐处设有可折叠显示屏,所述可折叠显示屏放下后与佩戴者的面部平行且可收起至帽檐下方并与帽檐处平行;所述头盔主体靠近佩戴者耳部设有语音通话模块;
6、还包括设置在头盔主体上的定位模块与控制处理器,所述光源、光学摄像头、红外成像传感器、毫米波雷达、定位模块、语音通话模块和可折叠显示屏均与控制处理器连接;
7、所述手持终端外置组件包括物联网模块、手持控制板和电源模块,所述手持控制板为按钮布置且内部设有存储介质,手持控制板上设有物联网模块,手持控制板与控制处理器连接,用于将控制处理器发送来的部分毫米波雷达信息、红外信息和光学图像信息打包传输;所述电源模块设置在手持控制板内,用于为手持终端外置组件和头戴式盔体组件供电。
8、进一步地,利用手持控制板将信号发送至控制处理器进而控制光源的开闭和亮度,所述光源通过折叠底座与头盔主体连接,可实现0°-45°折叠。
9、进一步地,利用地面或远程终端控制手持终端外置组件和控制处理器来实现光源和光学摄像头配合进行光照条件下的图像采集,或红外成像传感器和光学摄像头交叉采集图像信息,将采集到的图像数据依次通过控制处理器和物联网模块传输到远程控制端,在地面或远程终端利用深度学习进行匹配处理获取图像信息,并将图像信息的立体显示和热场分布通过物联网模块和控制处理器显示在可折叠显示屏的复合图像显示区上。
10、进一步地,利用手持控制板将信号发送至控制处理器进而分别控制两侧毫米波雷达的开闭和旋转角度,以获取目标点云数据,所述目标点云数据包括各个散射回波点的距离、方位角度、俯仰角度和瞬时速度,可结合物体微动信息进行处理实现对发生落石或塌方的探测,并将点云布局通过控制处理器显示在可折叠显示屏的复合图像显示区上。
11、进一步地,所述可折叠显示屏上一侧为参数显示,所述参数显示包括左侧雷达横轴转动角度、左侧雷达纵轴转动角度、右侧雷达横轴转动角度、右侧雷达纵轴转动角度、定位模块方向指示、语音通话提示和剩余电量显示,另一侧为用于显示红外和光学融合切换图像的复合图像显示区。
12、一种复杂作业场景探测头盔装置的应用方法,包括以下步骤:
13、步骤一、对头盔装置进行前期检查并显示正常后,根据场景特点分别选取毫米波雷达、红外成像传感器、光学摄像头进行探测,实现对当前定位点场景的感知,并将数据传输到地面或远程控制终端,通过地面或远程终端进行数据处理,包括场景态势感知和建模,再将处理后的数据传输至控制处理器并在可折叠显示屏上显示;
14、步骤二、地面或远程控制端可通过物联网模块与工作人员通信,并可根据场景信息和定位信息来指导工作人员的具体活动,包括:发生意外时进行自救;电量不足或头盔装置损坏时的自动预警;静止状态时仅利用光学摄像头采集图像或利用红外成像传感器和光学摄像头交叉采集图像或利用毫米波雷达获取三维建模信息,用于指导工作人员救援、信息采集或作业。
15、进一步地,在步骤一中,在对当前定位点场景感知时,开启红外成像传感器的摄像头后与光学摄像头的工作方式为,前后10秒间隔,即分别工作10秒进行采集,此时的光学摄像头需结合照明灯源;数据同步上传于远程控制端,地面或远程终端利用深度学习算法实现白光条件下的两种图像机制的复合;该模式也可进行转动扫描机制进行环扫。
16、进一步地,左右侧的毫米波雷达可分别工作或同步工作,每次可沿x轴或y轴调整的角度为3°,探测时间为10s。
17、进一步地,在步骤二中,具体活动包括:
18、1、探测人员佩戴好头盔装置在工作时,定位模块实时向地面或远程控制端发送位置信息;当探测人员在井下发生意外情况时,可通过长按手持控制板上的语音通话按键,向地面发送求救信号,通知地面人员此时的工作人员遇到意外情况;
19、2、当控制处理器监测电源不足或监测到头盔装置遭到破坏,控制处理器判定为探测人员遇险,手持终端外置组件会立即向地面发出救援信号;
20、3、当工作人员呈静止状态以对当前场景进行探测和评估时,若光线降低,可开启光源配合光学摄像头进行探测,并将数据传输到地面或远程控制终端,地面或远程控制终端对光学摄像头图像进行处理,以识别待探测目标并标注,将处理后的图像再返回至可折叠显示屏上;
21、4、若地面或远程控制终端得到的信息仍然缺乏时,可关闭照明光源,并开启红外成像按钮进行探测,将数据传输到地面或远程控制终端,地面或远程控制终端对光学摄像头获取的图像与红外成像传感器获取的图像进行融合处理,以识别待探测目标并标注,再将处理后的图像返回至可折叠显示屏上;
22、5、若场景呈现雨雾或烟尘时,开启并控制左右两侧的毫米波雷达,将两侧毫米波雷达所获取的场景立体数据进行点云匹配和融合,并将点云数据传输到地面或远程控制终端,地面或远程控制终端进行聚类和三维坐标绘制后,返回至可折叠显示屏上。
23、进一步地,具体活动还包括将头盔装置作为临时静止探测装置或取证数据录取装置,将其固定在某一处,可实现对场景中围岩形变的持续观测。
24、相较于现有技术,本发明的有益效果是:
25、本发明一种复杂作业场景探测头盔装置及应用方法,头戴式盔体组件的头盔主体上设有左右对称的毫米波雷达、红外成像传感器、光学摄像头、光源、可折叠显示屏、定位模块、语音通话模块和控制处理器,手持终端外置组件包括物联网模块、手持控制板和电源模块,可在静止态下通过光学摄像头进行图像采集,或在红外条件下实现光学摄像头与红外成像传感器交叉进行图像采集并进行融合处理,还可利用毫米波雷达进行三维建模;
26、本发明一种复杂作业场景探测头盔装置及应用方法,可应对井下作业、救援等场景中粉尘弥漫、泥浆飞溅、烟雾遮挡或落石塌方的因素,可克服单一传感器的弊端,使得作业/救援人员有效感知前视区域风险、躲避顶部物体塌落,临时静止探测装置、取证数据录取装置,将其固定在某一处,可实现对场景中围岩形变的持续观测,实现全场景的对复杂作业场景进行立体观测、传输和分析,保障人员的生命安全;
27、本发明一种复杂作业场景探测头盔装置及应用方法,还可通过控制处理器监测电源不足或头盔装置遭到破坏时自动发出救援信号,实现了全天时和全天候检测、监测以及预警,进一步保障了施工人员或检测人员的生命安全。
- 还没有人留言评论。精彩留言会获得点赞!