一种维稳缓震仿生足垫
本发明属于机械仿生工程领域,特别涉及一种维稳缓震仿生足垫。
背景技术:
1、当前,随着人们运动健康意识的提升,鞋底缓震性能技术快速发展,良好的缓震性能为穿着者提供舒适脚感的同时,也起着运动保护的作用。然而,复杂的路面和地形环境对运动鞋的触地缓震性能和稳定性提出了更高的要求和挑战。与此同时,在机器人领域,腿足式机器人技术快速发展,广泛应用于军事侦察、抢险救灾等领域。然而,复杂的路面和地形环境对机器人腿足式系统的路面适应性和高效缓冲减震性能,以及由两者共同作用决定的机器人腿足式系统的触地稳定性。
2、文献调研表明:在运动鞋领域中,现代的中底一般都是由发泡类的泡沫材料加工制作,通过材料的压缩与弹性,在足-地界面产生阻力,消耗碰撞产生的机械能,从而起到减小冲击载荷的作用。开发高缓震鞋材是提升鞋中底缓震性能的重要措施之一,但适用于鞋中底缓震新材料在保证鞋材功能基础上,安全性、环保性及稳定性等同样需要关注,因此开发新型缓震材料周期长、成本高。一般情况下,选用较软的材料和较厚的中底,可以提供更好的缓震效果,而这样所产生的后果是加大踝关节的翻转,增加运动损伤风险,降低运动的稳定性。单纯依靠材料的柔韧性,必然在缓震性能和稳定性上自相矛盾,这使得在有限的中底厚度空间上,尤其是鞋前掌较薄中底空间上,从结构和材料耦合角度入手成为一种行之有效的手段。在机器人腿足领域,当前的腿足式机器人主要通过在腿足系统中设计复杂的缓冲机构/结构或添加弹性材料/元件的方式来缓解地面作用力强度,但由于弹性材料/元件的各向同性的材料力学特性限制,尚不具备良好的触地各向柔顺适应性,常常造成触地振颤、稳定性差等问题,目前主要依靠复杂的控制系统、传感反馈来实时精确调整足部姿态以适应复杂路面和地形变化,而这又直接导致了机器人的整体控制难度增加,成本增加等问题,因此亟需解决。
3、专利“一种运动鞋仿生缓震中底”(cn201710354587.x)通过根据鸵鸟足第ⅲ趾下方的足垫及内部三条趾缓冲垫的仿生设计,将缓震前掌区和缓震后跟区均分为内层缓震结构、中间层过渡结构及外层承压结构,以改进运动鞋穿戴者触地缓震性能,然而该专利无法改进穿戴者触地时的稳定性;专利“一种仿生缓震鞋中底”(cn202010882851.9)通过模仿鸵鸟足触地时跖趾关节运动姿态和第三趾足底的足垫内部缓冲材料与结构以改进运动鞋穿戴者触地缓震性能,该专利也无法改进穿戴者触地时的稳定性,且该专利结构复杂制作繁琐,且结构部件通过胶水结合,长时间使用会出现胶水结合处分离,从而出现中底主要性能削弱、使用寿命短以及对使用者触地安全性造成影响。因此,同时改善运动鞋穿戴者触地缓震性与稳定性的问题亟需解决。专利“一种提高腿足式机器人触地稳定性的耦合仿生足垫”(cn202110115801.2)通过模拟人体足跟垫隔室结构及材料以改善腿足式机器人触地稳定性,而该专利在水平方向上的维稳是通过羽状隔室的形变来实现的;在竖直方向上的维稳是通过椭球状隔室的变形实现的。且椭球状隔室以及羽状隔室是通过胶水粘结在一起,可能会存在脱胶导致的稳定性差问题;本专利在水平方向上的维稳是通过仿生足垫壳体结构自身形变以及单体与壳体结构的相互位移消耗能量实现的,作用过程更加平缓稳定;在竖直方向上的维稳是通过壳体结构的形变以及隔室与壳体结构的剪切变形实现的,使得本专利的维稳力的范围更广,并且本专利是通过过盈配合的一体化结构设计,结构上更简单可靠,避免了脱胶导致的稳定性差问题。
4、而自然界生物的腿足式运动给问题的解决提供了天然的学习蓝本。跳鼠生活在荒漠中(坚硬的戈壁、松软的沙地、荒漠),善于跳跃,落地过程中,其足部跟骨的脂肪垫(足跟垫)是与沙地接触的首要部位。生物力学研究表明:跳鼠趾垫内的脂肪室结合丰富的胶原纤维起到了极好的缓冲作用。由多个脂肪细胞组成的脂肪室相当于一个个充满液体的缓冲垫,这些“缓冲垫”被胶原纤维分隔开,就像床垫上的孤立弹簧一样,在压缩过程中限制了大体积的液体流动。这样的结构使跳鼠趾垫特殊的多层隔室结构及材料协调耦合作用使其具备了优异的生物力学性能。
5、基于不规则状胶原纤维与“柔性”脂肪室所形成具有双级复合材料特性的跳鼠趾垫脂肪室结构与材料特性启发,发明了一种维稳缓震仿生足垫。
技术实现思路
1、本发明的目的是为了解决现有运动鞋缓震中底性能不良而导致运动鞋触地稳定性与缓震性差以及解决现有机器人腿足系统触地稳定性差的难点问题,而提供一种维稳缓震仿生足垫。
2、本发明基于不规则状胶原纤维与“柔性”脂肪室所形成具有双级复合材料特性的跳鼠趾垫脂肪室结构与材料特性启发,通过其独特的材料及结构的耦合仿生有效解决以上问题。
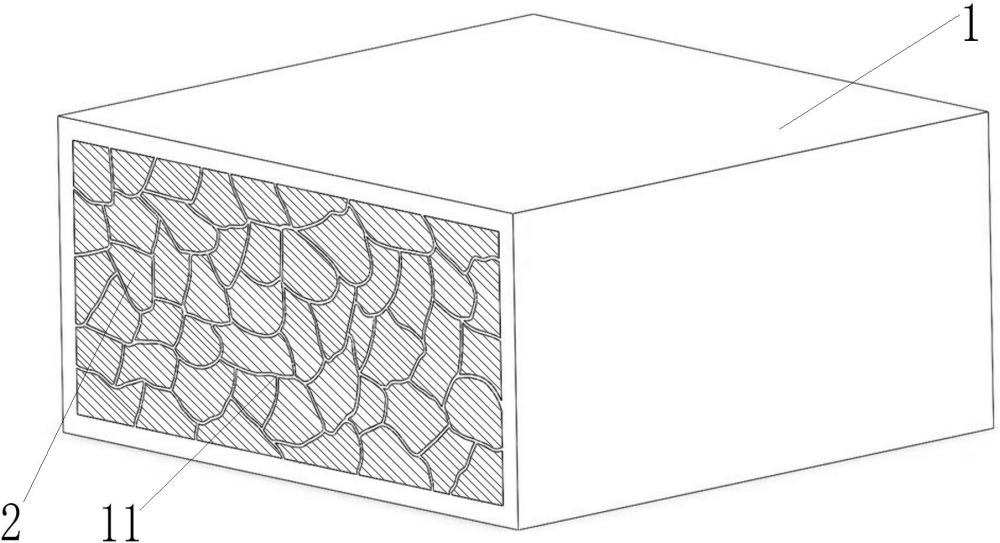
3、一种维稳缓震仿生足垫,包括仿生足垫壳体和缓冲填充物;
4、所述的仿生足垫壳体的横截面为矩形,内部设置有数个沿同一方向的贯穿型隔室分隔壁,贯穿型隔室分隔壁呈无规则排布,在仿生足垫壳体内形成贯穿型隔室;
5、所述的贯穿型隔室中填充有粘弹性缓冲填充物,每个贯穿型隔室中填充的粘弹性缓冲填充物形成一个缓冲填充物单体,缓冲填充物的长度与仿生足垫壳体的宽度一致。
6、所述的仿生足垫壳体的壁厚为2 mm,贯穿型隔室分隔壁的厚度为0.3 mm。
7、所述的贯穿型隔室为50个,沿仿生足垫壳体的矩形横截面的四条边依次分隔出的贯穿型隔室的数量比为5:8:5:7。
8、所述的仿生足垫壳体的材质为硬度为50的热可塑性聚氨酯软胶。
9、所述的缓冲填充物的材质为硬度为30 ha、弹性模量为1.15 mpa的ab硅胶材料。
10、本发明的工作过程和工作原理:
11、本发明受基于不规则状胶原纤维与“柔性”脂肪室所形成具有双级复合材料特性的跳鼠趾垫脂肪室结构与材料特性启发,基于其独特的材料及结构的耦合,发明了一种提高机器人腿足系统或运动鞋触地稳定性和缓震性能的维稳缓震仿生足垫。本发明的维稳缓震仿生足垫组合后整体呈长条状长方体结构。仿生足垫与地面触地的过程中,地面的冲击力作用于仿生足垫壳体结构,竖直方向上仿生足垫的壳体结构初始发生大变形,其表现出低刚度力学现象;随着压缩的继续进行,竖直方向上仿生足垫的缓冲填充物单体与贯穿型隔室开始发生竖直方向上的剪切变形,贯穿型隔室不能在竖直方向再继续发生较大的形变,此时表现出较高刚度,因此在竖直冲击力f1作用下仿生足垫整体呈现出高度非线性。在水平方向上,由于仿生足垫内部由多个可以独立活动的缓冲填充物单体与贯穿型隔室构成,缓冲填充物单体无规则错落分布,缓冲填充物单体与贯穿型隔室之间更容易发生水平剪切变形,缓冲填充物单体与贯穿型隔室在水平剪切力f2的作用下初始有相互位移而随着水平剪切力的增大缓冲填充物单体与贯穿型隔室之间难以发生位移变形,该方向上仿生足垫整体表现出非线性刚度的特点。因此,该仿生足垫高度各向异性的力学行为使其表现出较好的柔顺性,提高了触地稳定性;同时仿生足垫壳体的初始大变形及竖直方向剪切力变形行为延长了冲击力的作用时间,有效起到缓冲作用。
12、本发明的有益效果:
13、1、本发明受基于不规则状胶原纤维与“柔性”脂肪室所形成具有双级复合材料特性的跳鼠趾垫脂肪室结构与材料特性启发,基于其独特的材料及结构的耦合,使仿生足垫表现在收到竖直方向上的力的时候,仿生足垫各缓冲填充物单体之间的接触变为非规则曲线接触,当各缓冲填充物单体发生相对移动时,产生的等效摩擦力更大,会消耗更多的冲击能量(剪切变形),起到了逐层消散冲击力的作用,使仿生足垫表现在竖直方向产生“大变形”范围较大,柔顺性较好,表现出变刚度的力学特性,同时贯穿性隔室使仿生足垫在水平方向上能够实现非线性刚度,可有效起到防止“触地震颤”现象,提高机器人腿足系统与运动鞋的触地缓震性和稳定性。
14、2、本发明的材料组成,通过热可塑性聚氨酯软胶—ab硅胶材料耦合作用使该仿生足垫具有优异的缓冲吸震性能。
15、3、本发明的仿生足垫上表面可直接涂抹柔性粘合剂,贴附于跳跃式腿足机器人足底表面,操作方便,便于更换。
16、4、本发明通过简单、安全、可靠的结构形式同时兼顾运动鞋或机器人腿足系统的触地稳定性和缓震功能。
- 还没有人留言评论。精彩留言会获得点赞!