一种应用于康复助行机器人的自适应控制方法与流程
本发明涉及机器人控制、医疗康复领域。特别地,本发明涉及一种应用于康复助行机器人的自适应控制方法。
背景技术:
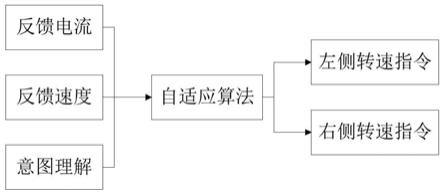
:康复机器人是近年来机器人的重点研究领域。老年人、骨折患者、脑神经病患,都会遇到下肢肌肉萎缩的情况。康复助行机器人可以辅助人们完成行走动作,运动腿部肌肉,进行康复训练,相较于康复技师,有着工作持久、感应灵敏、综合成本低等显著优势。由于康复助行机器人的主要适用对象为老、弱、病群体,除了需要考虑用户的使用体验,更需要考虑用户使用时的安全问题。为确保康复助行机器人的安全性、实用性、易用性与稳定性,一套完整、合理的自适应控制方案是必须的,以实现用户与康复助行机器人的互助共融。技术实现要素:提出一种针对康复助行机器人的自适应控制方法,提高康复助行机器人的安全性与易用性,优化用户的使用体验。为实现上述目的,本发明所采用的技术方案是:一种应用于康复助行机器人的自适应控制方法,包括构建如下程序执行模块:意图理解模块、运动控制模块;所述意图理解模块根据采集的康复助行机器人的信号分析机器人行为,判断使用者行为意图;所述运动控制模块根据康复助行机器人反馈的信号,并结合意图理解模块作出的使用者行为意图,输出电机转速指令给康复助行机器,实现康复助行机器人的自适应控制。所述意图理解模块包括信号采集单元、行为分析单元、意图理解单元;所述信号采集单元采集的信号包括左、右侧电机的各个旋转速度信号、工作电流信号;所述行为分析单元分析机器人的行为,包括:转完运动、前进/后退运动、静止以及超速;所述意图理解单元用于判断使用者行为意图,包括:减速转弯、加速转弯、同向加速、同向减速、前进、后退、超速保护。当采集的左右电机差速运动时,判断为机器人的行为是转弯运动;此时,若电流信号同向增大则判断使用者意图是减速转弯,若电流信号同向减小则判断使用者意图是加速转弯;当采集的左右电机匀速运动时,判断为机器人的行为是前进/后退运动;此时,若电流信号同向增大则判断使用者意图是同向加速,若电流信号同向减小则判断使用者意图是同向减速;当采集的左右电机转速信号为零时,判断为机器人的行为是静止;此时,若电流信号正向增大则判断使用者意图是前进,若电流信号反向增加则判断使用者意图是后退;当采集的左右电机转速信号超过预设限值时,判断为机器人的行为是超速、使用者意图是执行超速保护。所述机器人反馈的信号包括:左轮反馈电流ifdbl,右轮反馈电流ifdbr,左轮反馈速度vfdbl,右轮反馈速度vfdbr;所述电机转速指令包括:左侧电机转速指令vrefl,右轮电机转速指令vrefr。当使用者意图是减速转弯时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=vfdbl+f1·(vfdbr-vfdbl),vrefr=vfdbr+fr·(vfdbl-vfdbr);当使用者意图是加速右转弯时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=vfdbl-f1·(vfdbr-vfdbl),vrefr=vfdbr;当使用者意图是加速左转弯时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=vfdbl;vrefr=vfdbr-fr·(vfdbl-vfdbr);当使用者意图是同向加速时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=vfdbl+k1·(ifdbl-inormal),vrefr=vfdbr+kr·(ifdbr-inormal);当使用者意图是前进时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=vnormal,vrefr=vnormal;当使用者意图是后退时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=-vnormal,vrefr=-vnormal;当使用者意图是执行超速保护时,按照如下公式计算并输出左、右轮电机转速指令;vrefl=0,vrefr=0;其中,默认转速值为vnormal,默认转速下的电流值为inormal,需要预先标定的参数为左轮电机转速影响因子f1、右轮电机转速影响因子fr、左轮电电流影响因子k1、右轮电机电流影响因子kr。本发明的有益效果是:1.将康复助行机器人的控制方法进行模块化划分,宜于产品的维护与升级;各个模块分工明确,模块间的信息传递清晰明了,提高系统整体的稳定性与完善性。2.意图识别模块可以检测到用户的运动意图,并通过运动控制模块,调整用户所需的康复训练模式,无需医护人员参与,提高产品的易用性。附图说明图1为本发明提供的康复助行机器人的自适应控制原理框图;图2为本发明提供的自适应控制方法控制流程框图;图3为本发明的结构示意图;图4为本发明的侧视图;图5为本发明的后视图;图6为本发明将脚踏板挂于前端的状态示意图;图7为本发明的使用状态示意图之一;图8为本发明的使用状态示意图之二;图9为本发明的使用状态示意图之三;图10为本发明的使用状态示意图之四;图11为本发明的使用状态示意图之五。图中:1为设备底盘支架,2为支撑台面,3为控制器,4为电动推杆ⅰ,5为电动推杆ⅱ,6为设备后轮,7为设备前轮,8为脚踏板,9为设备拖尾,10为可伸缩支撑杆,11为转轴,12为腿部挡板,13为纵向支架,14为气弹簧,15为弯管,16为行走护具挂钩,17为操控手柄,18为紧急停止开关,19为把手,20为松紧螺母,21为人机交互面板,22为上部挂钩,23为底部挂钩,24为脚踏板挂钩,25为横杆。具体实施方式下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明的目的,但不用来限定本发明的范围。康复助行机器人通过驱动电缸为病患提供支撑力,辅助病患站起(具体结构见示意图3-11),从而减少病患腿部受到的压力。在病患直立行走状态中,由用户推动康复助行机器人进行运动,可根据用户需求,手部、肘部或身体其他部位接触机器人,提供持续牵引力或持续阻力,辅助腿部康复行走训练。并且,机器人将在超速状态时制动电机,起到保护作用。通过自适应控制方法,康复助行机器人可以实现以下功能:1.康复助行机器人可以按照使用者的意图,辅助使用者行走,例如:前进助行、转弯助行、驻车等;2.康复助行机器人的行走速度,根据使用者的行走速度动态调整;3.康复助行机器人可以提供不同的助力/阻力,以适应使用者不同阶段的康复需求;4.康复助行机器人在超速状态下,可以自动制动电机,以起到安全保护的作用。康复助行机器人功能实现的核心在于控制器对用户行为意图的理解、以及对电机的控制,分别由意图理解模块和运动控制模块实现。康复助行机器人的自适应控制原理框图如图1所示,驱动控制模块、左右驱动电机为市购的成型产品。意图理解模块主要包括信号采集、行为分析、意图理解三个部分,在康复助行机器人中,采集信号包括左右侧电机的旋转速度、工作电流共四个数据;根据采集的信号进行机器人行为分析以及用户意图理解,具体对应关系如表格所示:运动控制模块,根据意图理解模块所判断的用户意图,结合所采集的信号幅值,进行电机速度闭环控制,控制框图如图2所示。设左轮反馈电流为ifdbl,右轮反馈电流为ifdbr,左轮反馈速度为vfdbl,右轮反馈速度为vfdbr,左侧电机转速指令为vrefl,右轮电机转速指令为vrefr,默认转速值为vnormal,默认转速下的电流值为inormal,需要标定的参数为左轮电机转速影响因子f1、右轮电机转速影响因子fr、左轮电电流影响因子k1、右轮电机电流影响因子kr,则根据自适应控制算法,可以获得左右电机转速指令的计算公式如下表所示:意图理解左轮电机转速指令右轮电机转速指令减速转弯vrefl=vfdbl+f1·(vfdbr-vfdbl)vrefr=vfdbr+fr·(vfdbl-vfdbr)加速右转弯vrefl=vfdbl-f1·(vfdbr-vfdbl)vrefr=vfdbr加速左转弯vrefl=vfdblvrefr=vfdbr-fr·(vfdbl-vfdbr)同向加速vrefl=vfdbl+k1·(ifdbl-inormal)vrefr=vfdbr+kr·(ifdbr-inormal)同向减速vrefl=vfdbl+k1·(ifdbl-inormal)vrefr=vfdbr+kr·(ifdbr-inormal)前进vrefl=vnormalvrefr=vnormal后退vrefl=-vnormalvrefr=-vnormal超速保护vrefl=0vrefr=0如图3-4所示,为一种康复助行机器人,包括设备底盘支架1、支撑台面2、控制器3、电动推杆ⅰ4、电动推杆ⅱ5、可伸缩纵向支撑架、操控手柄17及把手19,其中可伸缩纵向支撑架可转动地设置于设备底盘支架1的前端,支撑台面2设置于可伸缩纵向支撑架的顶部,电动推杆ⅱ5铰接在设备底盘支架1上、且输出端与可伸缩纵向支撑架铰接,用于调整支撑台面2的倾斜角度,电动推杆ⅰ4铰接在设备底盘支架1的前端、且输出端与支撑台面2连接,用于调整支撑台面2的高度。操控手柄17和把手19设置于支撑台面2的前端,控制器3设置于可伸缩纵向支撑架上,操控手柄17用通过控制器3控制电动推杆ⅰ4和电动推杆ⅱ5的伸缩。设备底盘支架1的底部设有两个设备前轮7和两个设备后轮6,设备前轮7为全向带刹车轮,设备后轮6为带动力车轮或非动力车轮,不同的轮系实现不同的功能。设备底盘支架1的底部中间位置可拆卸地设有脚踏板8。脚踏板8上可转动地设有脚踏板挂钩24,通过脚踏板挂钩24钩挂在设备底盘支架1底部设有的底部挂钩23上。可伸缩纵向支撑架包括两个纵向支架13和两个弯管15,其中两个纵向支架13的下端通过转轴11铰接在设备底盘支架1的前端,纵向支架13为空心结构,两个弯管15的一端分别插设于两个纵向支架13内、且可相对滑动,另一端与支撑台面2固定连接,电动推杆ⅰ4铰接在两个纵向支架13之间设有的横杆25上。当电动推杆ⅰ4伸长时,弯管15从纵向支架13的内部伸出,支撑平台2被推高;当电动推杆ⅰ4缩短时,弯管15缩入到纵向支架13的内部,支撑平台2被拉低。进一步地,电动推杆ⅱ5为两个、且对称设置于设备底盘支架1的两侧,两个电动推杆ⅱ5的输出端分别与两个纵向支架13铰接。当电动推杆ⅱ5缩短时,纵向支架13以转轴11为中心向电动推杆ⅱ5的收缩方向转动;当电动推杆ⅱ5伸长时,纵向支架13以转轴11为中心向电动推杆ⅱ5伸长方向转动。进一步地,支撑台面2上设有紧急停止开关18和人机交互面板21,如图5所示。当紧急停止开关18被触发断掉电动推杆ⅰ4、电动推杆ⅱ5的供电和设备后轮6的轮毂电机的供电。人机交互面板21可以显示设备参数状态,调节设备运行状态参数。控制器3的内部有电动推杆控制系统、电机控制系统、人机交互操作控制系统,控制器3的背面设有上部挂钩22,如图5所示;当将脚踏板8从底部挂钩23上取下时,转动脚踏板挂钩24至脚踏板8的背面,然后钩挂在上部挂钩22上,如图6所示。如图3-4所示,设备底盘支架1的前端设有可伸缩腿部阻挡机构,可伸缩腿部阻挡机构包括可伸缩支撑杆10和腿部挡板12,两个可伸缩支撑杆10的一端与设备底盘支架1固定连接,另一端与腿部挡板12连接,腿部挡板12通过可伸缩支撑杆10推动伸出后挡在患者膝盖及小腿前面,可伸缩支撑杆10通过松紧螺母20锁紧或放松,腿部挡板12可以沿着可伸缩支撑杆10的方向,斜向上伸出,或者斜向下缩回。进一步地,设备底盘支架1的后端两侧铰接有设备拖尾9,两个设备拖尾9可向内侧或外侧转动。当设备转弯时,设备拖尾9如果遇到障碍会沿障碍物相反方向弯转,当离开障碍物后设备拖尾9恢复原来状态。设备拖尾9用来增加设备长度,当设备重心靠后时有效防止设备后翻,围绕转轴可以向两侧分别转动90度,以来障碍物后制动回到0度水平位置。进一步地,支撑台面2的两侧通过气弹簧14支撑,气弹簧14的下端与可伸缩纵向支撑架铰接,上端与支撑台面2铰接。支撑台面2的下方有行走护具挂钩16,用于用户挂接保护护具。用户在使用设备时,双手握住把手19,小臂支撑在支撑平台2上,支撑平台2采用符合人体工学设计,支撑平台2的开口大小可调,保证适用于不同身材的人。操控面板21由显示屏幕、操控按键及状态指示灯所组成,用于显示设备的运行信息,设置对设备后轮6的轮毂电机的控制参数,控制电动推杆ⅰ4和电动推杆ⅱ5的伸缩。不同的轮系可以实现不同的行走训练功能:带动力轮系的助行机器人在应用过程中,用户可以通过人机交互面板设置不同的行走模式:前进方向提供持续阻力的阻力训练模式;前进方向提供牵引力的行走训练模式。设备的行驶速度与用户的行进速度保持同步,用户在应用中可以设置速度的上限阈值,当用户行走速度突然超出速度上限时,训练器刹车防止用户跌倒或者越走越快。不带动力轮系的助行机器人,通过调整与车轮阻力摩擦片的松紧来实现在行进方向上提供持续的阻力。本发明的工作原理是:1.将患者辅助拉起/放下,在这个过程中不在需要护理人员去抱起或者放下患者,充分的保证了护理人员和患者的安全。如图7所示,患者在坐姿状态下,用户为患者穿戴好护具,护具挂接到设备的行走护具挂钩16上。患者双手握住把手19,小臂倚在支撑台面2上,用户通过操控手柄17控制电动推杆ⅱ5伸长,设备拉动护具实现将用户从坐姿拉起站立,如图8所示。2.在搬移患者过程中,护理人员为患者穿好搬移护具,如图9所示,将设备的脚踏板8挂接在底部挂钩23上,将腿部挡板12拉出,患者双脚踏在脚踏板8上,腿部挡板12挡在患者膝盖及小腿前面,通过操控手柄17控制电动推杆ⅱ5伸出,设备将患者拉起,如图10所示。用户此时推动设备,将患者搬移到任意位置,到达位置后通过操控手柄17控制电动推杆ⅱ5缩短,将患者平稳的放到坐姿。3.患者进行步行训练时,护理人员不再需要花费很大的力气将患者抱起扶到传统行走助行架或天轨。如图7所示,将设备的脚踏板8挂接在控制器3的背面,将腿部挡板12缩到最低。为用户穿戴好行走训练护具,按照上述1的操作过程,将用户从坐姿拉起到站立状态,如图8所示。患者可以通过在人机交互面板21的操作,控制电动推杆ⅰ4的伸长或缩短来推高或降低支撑台面2的高度,挂在行走护具挂钩16上的护具,也随着支撑台面2的上升被上拉,通过护具来分担用户身体的部分重量。将患者可以根据自己腿部的力量将支撑台面2调整到合适的高度和角度来达到合适的减重效果,让行走变得更加的轻松。如果患者行走训练过于劳累无法走回到轮椅或者床边,护理人员只需要将脚踏板8从控制器3背面的上部挂钩22上拿下来,并挂接到底部挂钩23的位置,患者双脚踏在脚踏板8上,护理人员便可以将患者推回到轮椅或者是床边,在此过程中行走护具分担身体的大部分重量,腿部不会有太大的负担。通过此设备让行走变得更加轻松,安全。4.步行训练中在前进方向提供持续的阻力,阻力的大小可调;在用户行进的方向提供持续的牵引力,牵引力的大小可调,设备的行进速度与用户的行走速度自适应的保持同步;用户行走速度一旦超过设定的速度阈值,设备立刻刹车,设备速度的上限速度阈值可设置。用户通过人机交互面板21来设置行走参数,训练模式为助力行走/牵引力行走,速度上限值是多少。完成设置后,控制器3通过对设备后轮6的电机轮毂的控制来实现上述的功能满足不同用户的需求。如果设备后轮6的电机轮毂更换为带可调刹车阻力的非动力全向轮,可以单纯的实现在行进方向提供持续阻力功能,阻力的大小需要护理人员来调节。5.站立锻炼,如图9所示,用户穿戴好搬移护具,患者双脚踏在脚踏板8上,当腿部挡板12挡在患者的膝盖和小腿前面,护理人员通过控制器3将患者拉起到直立状态,如图10所示。护具兜住用户的后背至臀部的位置,防止用户后仰,腿部挡板12挡在用户膝盖至小腿的前面,防止用户腿部无力下蹲。通过控制电动推杆ⅰ4的伸缩,来调整支撑台面2的高低来达到一个舒适的高度;当用户站立累后,通过操控手柄17控制电动推杆ⅱ5缩短,将用户调节到如图10的之态,然后推回到轮椅或者是床边。与传统的站立架比较,在站立锻炼中陪护人员不需要花费很大的力气将患者搬到站立起架前,再费力的为用户系上安全带,当患者疲劳时护理人员需要花很大的力气将用户抱回到轮椅。本发明在整个过程中,充分的保护了患者和护理人员的安全,同时达到良好的站立训练效果。6.在狭小空间的使用,如图11所示,当用户使用此设备在狭小空间内回转时,设备拖尾9在遇到障碍物时会跟随着设备的转动倚着障碍转动,当离开障碍物后设备拖尾9会转到初始位置,设备拖尾9在保证设备不会向后翻倒的同时,有效的减小了设备的回转直径。本发明提供的一种多功能助行机器人,使用户可以轻松的进行行走训练,当用户腿部支撑力不够的时候,配合辅助护具设备可以实现减重的效果,减少用户双腿承担身体的重量,用户根据自身的情况可以灵活的增减重量。本发明机械辅助用户坐/立,不需要护理人员抱着患者将患者从坐姿拉起或者从站立姿态放到坐姿;机械辅助将患者从坐姿拉起后推动设备可轻松的将患者转移到任意位置,机械辅助患者坐下,全过程保证了护理人员和患者的安全。本发明在站立训练时,用户双脚踏在设备的脚踏板上,设备将患者从坐姿拉到站立姿态后,过安全带将用户固定在设备上,站立训练。训练结束后设备将用户缓慢平稳的放回到坐姿。本发明在阻力行走训练时,在用户行走方向上提供持续的阻力,阻力的大小可调。设备速度上限阈值可设置,当用户行走速度超过设置速度阈值时设备刹车;在用户行走的方向提供一定的牵引力,牵引力大小可调,设备的行进速度与用户的行走速度自适应的保持同步;当用户行走速度超过速度设定限值后设备刹车。以上所述是本发明的优选实施方式,应当指出,对于本
技术领域:
的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。当前第1页12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1