动力模组和辅助行走机器人的制作方法
1.本发明涉及机器人技术领域,特别涉及一种动力模组和辅助行走机器人。
背景技术:
2.随着中国老龄化进程,患有脑血管疾病或神经系统疾病的人群呈逐年递增趋势,这类患者多数伴有偏瘫症状,这严重影响着患者的生活质量。患者在医院可以进行系统的康复训练,但多数患者无法恢复到正常人的行走水平,需要辅具进行辅助行走。常规的辅具没有动力,很难真正辅助患者进行正常的行走。
技术实现要素:
3.本发明的目的在于提供一种动力模组和辅助行走机器人,以解决患者无法恢复到正常人的行走水平,需要辅具进行辅助行走,且常规的辅具没有动力,很难真正辅助患者进行正常的行走的技术问题。
4.本发明提供一种动力模组,包括:
5.底板;
6.驱动件,安装在所述底板上;
7.减速装置:至少包括第一级减速装置与第二级减速装置,所述第二级减速装置装设于所述底板上,所述驱动件、所述第一级减速装置、所述第二级减速装置依次相连,所述第二级减速装置与外部装置连接,所述第一级减速装置用于将所述驱动件的所述初始速度减小为中间速度,所述第二级减速装置用于将所述第一级减速装置的中间速度减小为预设速度。
8.其中,所述第二级减速装置包括同步轮、惰轮、传送带、夹持板以及丝杠,所述同步轮与所述惰轮均位于所述底板上,且所述惰轮与所述同步轮间隔设置,所述同步轮与所述外部装置相连,所述传送带套设在所述惰轮的外表面以及所述同步轮的外表面,且所述传送带内形成一个容置空间,所述夹持板固定夹持在所述传送带上,且向所述容置空间内延伸,所述丝杠收容在所述容置空间内,且所述丝杠包括靠近所述惰轮的第一端,所述第一端与所述夹持板滑动连接,所述丝杠进行转动运动,并将所述转动运动转化为所述夹持板的直线运动,所述夹持板带动所述传送带运动,所述传送带带动所述同步轮进行转动,所述同步轮带动所述外部装置运动。
9.其中,所述动力模组还包括支撑体,所述支撑体位于所述容置空间内,且支撑于所述底板上,所述支撑体上设有第一通孔,所述第一通孔靠近所述底板,所述丝杠还包括与所述第一端相对设置的第二端,所述丝杠的第二端穿过所述第一通孔伸出在外。
10.其中,所述第一级减速装置包括同步带与减速轮,所述支撑体还设有与所述第一通孔间隔设置的第二通孔,所述驱动件包括输出转轴,所述驱动件的输出转轴穿过所述第二通孔伸出在外,所述减速轮固定套设在所述第二端上,所述同步带套设在所述输出转轴的外表面与所述减速轮的外表面,所述驱动件的输出转轴带动所述同步带运动,所述同步
带带动所述减速轮转动,所述减速轮带动所述丝杠转动。
11.本发明提供一种辅助行走机器人,所述辅助行走机器人包括绑缚腰带、传感器、控制器以及动力模组,所述传感器、所述控制器以及所述动力模组均设于所述绑缚腰带的外表面,所述传感器与所述控制器相连,所述控制器与所述动力模组相连,所述动力模组与所述外部装置相连,所述绑缚腰带用于套设于使用者的腰部,所述传感器用于感应所述绑缚腰带的运动,并将感应信号传输给所述控制器,所述控制器控制所述动力模组运动,所述动力模组带动所述外部装置运动。
12.其中,所述外部装置为腿部绑缚装置,所述腿部绑缚装置包括腿杆模块以及与所述腿杆模块相连的绑缚腿带,所述腿杆模块与所述动力模组连接,所述绑缚腿带用于套设于使用者的腿部,所述动力模组运动以带动所述腿杆模块运动,所述腿杆模块带动所述绑缚腿带运动,以带动使用者的腿部行走。
13.其中,所述腿杆模块至少包括第一节腿杆与第二节腿杆,所述动力模组、所述第一节腿杆、所述第二节腿杆以及所述绑缚腿带依次连接,且所述第一节腿杆与所述第二节腿杆铰接,所述第二节腿杆与所述绑缚腿带铰接。
14.其中,所述腿杆模块还包括第三节腿杆,所述第三节腿杆设于第二节腿杆与所述绑缚腿带之间,且所述第三节腿杆的一端与所述第二节腿杆铰接,所述第三节腿杆的另一端与所述绑缚腿带铰接。
15.其中,所述腰部绑缚装置还包括腰部支撑架,所述腰部支撑架设于所述绑缚腰带的外表面,所述控制器设于所述腰部支撑架上。
16.其中,所述动力模组为两个,所述腿部绑缚装置为两个,一个所述动力模组与一个所述腿部绑缚装置连接。
17.综上所述,本申请通过在绑缚腰带的外表面设置传感器、控制器以及动力模组,当使用者在使用机器人辅助行走时,腰部发生运动,绑缚腰带跟随腰部的运动发生运动,传感器感受绑缚腰带的运动,并将运动信号传输给控制器,控制器控制动力模组运动,动力模组带动腿部绑缚装置运动,以带动使用者的腿部行走。本申请的机器人动力模组的设置解决了常规的辅具没有动力,很难真正辅助患者进行正常的行走的技术问题。同时,本申请只在绑缚腰带的外表面设有动力模组即可实现辅助行走,机器人的结构简单,体积小,解决了市面上的外骨骼机器人大多体积庞大,结构复杂,质量过大,不便于患者日常使用的技术问题。
附图说明
18.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明提供的动力模组的结构示意图。
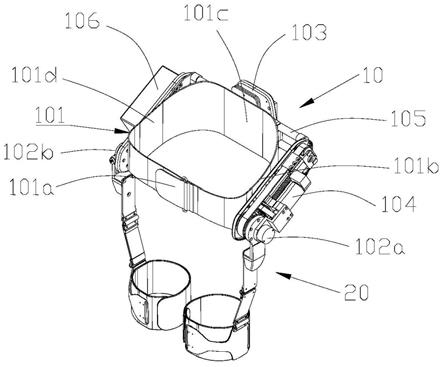
20.图2为本发明提供的辅助行走机器人的结构示意图。
21.图3是图2所示的辅助行走机器人的后视图。
22.图4是图2中的腿部绑缚装置的结构示意图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.本发明提供一种动力模组104,动力模组104可以应用在辅助行走机器人上。如下将详细介绍动力模组104。
25.请参阅图1,动力模组104包括底板104a、驱动件104b以及减速装置,驱动件104b设于底板104a上,减速装置设于底板104a上,驱动件104b与减速装置连接,减速装置与外部装置连接,动力模组104运动时,驱动件104b的速度为初始速度,减速装置用于将驱动件104b的初始速度减小为预设速度,并将预设速度传输给外部装置,外部装置以预设速度运动。
26.从而,当驱动件104b的初始速度较大时,较大的初始速度不适用于外部装置,为了将较大的初始速度转化成可使得外部装置可以适用的速度,需要对驱动件104b的初始速度进行减速。减速装置可对驱动件104b的初始速度进行减速,以使得外部装置的速度可变为预设的速度,该预设的速度适用于外部装置运动。
27.在一个具体的实施例中,减速装置至少包括第一级减速装置104c与第二级减速装置104d,驱动件104b、第一级减速装置104c、第二级减速装置104d依次相连,第二级减速装置104d与外部装置相连,第一级减速装置104c用于将驱动件104b的初始速度减小为中间速度,第二级减速装置104d用于将第一级减速装置104c的中间速度减小为预设速度。本实施例中,当初始速度无法直接减小到预设速度时,本申请采用两级降速,先把初始速度减小为中间速度,然后将中间速度减小为预设速度。两级降速的方式可以使得初始速度的变化更加平缓,动力模组104更加稳定,避免因为初始速度的变化太快所导致的动力模组104不稳定的技术问题。
28.在其他实施方式中,本申请的减速装置还可以包括第三级减速装置、第四级减速装置、第五极减速装置,或者更多,上述的多级减速装置用于在初始速度更大时,对初始速度减速,以得到最后的预设速度,或者对一般的初始速度进行更多次数的降速,速度的变化幅度更小,降速更平稳,动力模组104更加稳定。至于减速装置的具体级数,本申请不做限定,只要相应级数的减速装置可以使得减小后的速度达到预设速度,且动力模组104稳定即可。上述的减速装置可以直接相连,或者不相连,本申请在此不做限定。
29.在一个具体的实施方式中,第二级减速装置104d包括同步轮301、惰轮、传送带304、夹持板305以及丝杠306,同步轮301与惰轮均位于底板104a上,且惰轮与同步轮301间隔设置,同步轮301与外部装置相连,传送带304套设在惰轮的外表面以及同步轮301的外表面,且传送带304内形成一个容置空间40,夹持板305固定夹持在传送带304上,且向容置空间40内延伸,丝杠306收容在容置空间40内,且丝杠306包括靠近惰轮的第一端,第一端与夹持板305滑动连接,丝杠306进行转动运动,并将转动运动转化为夹持板305的直线运动,夹持板305带动传送带304运动,传送带304带动同步轮301进行转动,同步轮301带动外部装置运动。在本实施例中,夹持板305为传送带304夹持板305,即夹持板305与传送带304夹持固定。丝杠306可以选用滚珠丝杠306、梯形丝杠306等类似装置。
30.本实施例中,惰轮为两个,两个惰轮分别为第一惰轮302和第二惰轮303,第一惰轮
302和第二惰轮303间隔设于底板104a的一端,同步轮301设于底板104a的另一端,同步轮301的直径大于惰轮的直径,传送带304设于第一惰轮302和第二惰轮303与同步轮301的外表面。
31.传送带304至少包括6段,第一段设于同步轮301的外表面,第二段设于同步轮301的第一端与第一惰轮302的第一端之间,同步轮301的第一端与第一惰轮302的第一端相对设置且靠近,第三段设于第一惰轮302的外表面,第四段设于第一惰轮302和第二惰轮303之间,第五段设于第二惰轮303的外表面,第六段设于同步轮301的第二端与第二惰轮303的第二端之间,同步轮301的第二端与第二惰轮303的第二端相对设置且靠近。在其他实现方式中,惰轮还可以为一个。传送带304包括4段,一段设于惰轮的外表面,一段设于同步轮301的外表面,一段设于惰轮的第一端与同步轮301的第一端之间,惰轮的第一端与同步轮301的第一端相对设置且靠近,一段设于惰轮的第二端与同步轮301的第二端之间,惰轮的第二端与同步轮301的第二端相对设置且靠近。
32.传送带304套设在惰轮的外表面以及同步轮301的外表面之后,传送带304内还形成一个容置空间40,该容置空间40内可容置夹持板305、丝杠306以及下文的支撑体等元件,从而本申请利用容置空间40容纳夹持板305、丝杠306以及下文的支撑体等元件,这就利用了容置空间40内的闲置空间,省去了单独设置容纳夹持板305、丝杠306以及下文的支撑体等元件的空间,这就使得动力模组104的体积较小,机器人的体积较小。
33.在一个具体的实施例中,动力模组104还包括支撑体309,支撑体309位于容置空间40内,且支撑于底板104a上,支撑体309上设有第一通孔,第一通孔靠近底板104a,丝杠306还包括与第一端相对设置的第二端,丝杠306的第二端穿过第一通孔伸出在外。丝杠306通过与夹持板305滑动连接支撑在夹持板305上,且丝杠306可在第一通孔内转动。
34.在其他实现方式中,第二级减速装置104d还可以包括钢丝绳、高分子绳、绳轮,绳轮可固定设置在底板104a上,钢丝绳或高分子绳套设在绳轮上,夹持板305固定夹持在钢丝绳或高分子绳上,钢丝绳或高分子绳还套设在同步轮301上,丝杠306的转动运动转化为夹持板305的直线运动,夹持板305的直线运动转化为钢丝绳或高分子绳的运动,钢丝绳或高分子绳的运动转化为同步轮301的运动,最后转化为外部装置的运动。
35.在一个具体的实施例中,第一级减速装置104c包括同步带307与减速轮308,支撑体309还设有与第一通孔间隔设置的第二通孔,驱动件104b包括输出转轴,驱动件104b的输出转轴穿过第二通孔伸出在外,减速轮308固定套设在丝杠306的第二端上,同步带307套设在输出转轴的外表面与减速轮308的外表面,驱动件104b的输出转轴带动同步带307运动,同步带307带动减速轮308转动,减速轮308带动丝杠306转动。本实施例中,驱动件104b通过支撑体309的支撑位于丝杠306的正上方,第一通孔的中心与第二通孔的中心基本位于垂直于底板104a同一条直线上,输出转轴的中心与减速轮308的中心基本位于同一条基本垂直于底板104a的直线上,同步带307以基本垂直于底板104a的方式套设在输出转轴的外表面与减速轮308的外表面。减速轮308的直径大于输出转轴的直径,从而通过同步带307对速度的传递,减速轮308上的速度相较于输出转轴的速度就是较小的,从而从驱动件104b到丝杠306便进行了第一次减速。上述丝杠306的速度小于驱动件104b的速度,驱动件104b到丝杠306的便进行了第二次减速。也就是说,本申请通过直径较大的减速轮308与直径较大的同步轮301至少进行了两次减速。本申请动力模组104的减速比是较大的,可以输出足够大的
力矩,进而使得外部装置运动。上述的减速方式除了同步带307轮减速,还可以是齿轮减速等方式,只要是可以减速的方式,具体的使用情况根据具体的使用场景来定,本申请在此不做限定。
36.丝杠306的第一端上套设有丝杠螺母,丝杠螺母固定设于夹持板305内,当丝杠306转动时,丝杠螺母就会随丝杠306的转动角度按照对应规格的导程转化成直线运动,丝杠螺母的直线运动转化为夹持板305的直线运动,夹持板305的直线运动转化为传送带304的传输运动,传送带304的直线运动可转化为同步轮301的转动,进而带动外部装置运动。
37.当传感器感受的腰部运动为往复运动时,丝杠306的转动方向发生变化,丝杠306按照顺时针和逆时针方向交替转动,进而转化为丝杠306螺母的直线往复运动,丝杠306螺母的往复直线运动转化为夹持板305的往复直线运动,夹持板305的直线往复运动转化为传送带304的顺时针和逆时针交替进行的传输运动,进而转化为同步轮301的顺时针和逆时针交替进行的转动,进而带动外部装置前进和倒退等。
38.请参阅图2-图3,本发明还提供一种辅助行走的机器人。辅助行走的机器人包括:腰部绑缚装置10,腰部绑缚装置10包括绑缚腰带101、传感器、控制器103以及动力模组104,传感器、控制器103以及动力模组104均设于绑缚腰带101的外表面,传感器与控制器103相连,控制器103与动力模组104相连,动力模组104与外部装置相连,绑缚腰带101用于套设于使用者的腰部,传感器用于感应绑缚腰带101的运动,并将运动信号传输给控制器103,控制器103控制动力模组104运动,动力模组104带动外部装置运动。
39.具体的,绑缚腰带101包括依次首尾连接的第一腰带101a、第二腰带101b、第三腰带101c以及第四腰带101d,第一腰带101a用于装设于使用者腰部的前侧,第二腰带101b用于装设于使用者腰部的左侧,第三腰带101c用于装设于使用者腰部的后侧,第四腰带101d用于装设于使用者腰部的右侧。在其他实施例中,绑缚腰带101也可以为过肩背带。
40.在一个具体的实施例中,腰部绑缚装置10还包括腰部支撑架105与动力电池106,腰部支撑架105装设于第三腰带101c的外表面,控制器103设于腰部支撑架105的大致中间位置,腰部支撑架105用于固定支撑绑缚腰带101。动力模组104设于第二腰带101b的外表面,动力电池106可以装设于第四腰带101d的外表面,用于为动力模组104供电,以带动腿部绑缚装置20运动。传感器至少包括第一传感器102a与第二传感器102b,第一传感器102a可以为患侧传感器(使用者患病腿部一侧的传感器),第二传感器102b可以为健侧传感器(使用者健康腿部一侧的传感器),第一传感器102a设于动力模组104上,第二传感器102b设于第四腰带101d上。
41.在一个具体的实施例中,动力模组104装设于第二腰带101b,动力电池106装设于第四腰带101d,动力电池106用于为驱动件104b供电,以使驱动件104b输出动力。驱动件104b可以为伺服电机。在其他实现方式中,动力模组104也可以装设于第四腰带101d,动力电池106装设于第二腰带101b。动力电池106也可以首先安装在底板104a上,底板104a再安装在腰带上。腰部支撑架105的一端与动力模组104的底板104a固定连接,腰部支撑架105的另一端与安装动力电池106的底板104a固定连接。也就是说,使用者的哪一条腿行走困难(患病腿部),动力模组104装设于该条腿一侧的腰带上。
42.请参阅图4,在一个具体的实施方式中,外部装置为腿部绑缚装置20,腿部绑缚装置20包括腿杆模块以及与腿杆模块相连的绑缚腿带201,腿杆模块与动力模组104连接,绑
缚腿带201用于套设于使用者的腿部,动力模组104运动以带动腿杆模块运动,腿杆模块带动绑缚腿带201运动,以带动使用者的腿部行走。具体的,腿杆模块用于传输到动力模组104的运动到绑缚腿带201,进而使得绑缚腿带201的运动带动使用者的腿部进行行走。
43.从而,本申请通过在绑缚腰带101的外表面设置传感器、控制器103以及动力模组104,当使用者在使用辅助行走机器人辅助行走时,腰部发生运动,绑缚腰带101跟随腰部的运动发生运动,传感器感受绑缚腰带101的运动,并将运动信号传输给控制器103,控制器103控制动力模组104运动,动力模组104带动腿部绑缚装置20运动,以带动使用者的腿部行走。
44.本申请的机器人动力模组104的设置解决了常规的辅具没有动力,很难真正辅助患者进行正常的行走的技术问题。同时,本申请只在绑缚腰带101的外表面设有动力模组104即可实现辅助行走,机器人的结构简单,体积小,解决了市面上的外骨骼机器人大多体积庞大,结构复杂,质量过大,不便于患者日常使用的技术问题。
45.在一个具体的实施方式中,腿杆模块至少包括第一节腿杆202与第二节腿杆203,动力模组104、第一节腿杆202、第二节腿杆203以及绑缚腿带201依次连接,且第二节腿杆203与绑缚腿带201铰接。本申请中,同步轮301与第一节腿杆202连接,同步轮301包括远离底板104a的安装面,第一节腿杆202装设在同步轮301的安装面上,当同步轮301转动时,第一节腿杆202可进行前后运动,进而带动第二节腿杆203运动,从而带动绑缚腿带201进行前后运动,绑缚腿带201带动使用者的腿部进行前后运动。
46.腿杆模块还可以包括第三节腿杆204。第三节腿杆204铰接在第二节腿杆203与绑缚腿带201之间。第三节腿杆204的设计使得本申请的第三节腿杆204与第二节腿杆203铰接,第三节腿杆204与绑缚腿带201铰接,从而至少双铰链设计使得腿部绑缚装置20可以适用于不同腿围的使用者。本申请中,第三节腿杆204与第二节腿杆203通过第一铰链207铰接,第三节腿杆204与绑缚腿带201通过第二铰链206铰接。
47.在其他实现方式中,腿杆模块还可以包括第四节腿杆、第五节腿杆,或者更多的腿杆等,本申请在此不限制数量。上述的多节腿杆依次铰接连接。更多节的腿杆可以使得腿部绑缚装置20为更多节的铰链设计,更多节的铰链设计可以使得腿部绑缚装置20适用于更多腿围的使用者。
48.在一个具体的实施例中,腿杆模块还包括腿部支撑板205,腿部支撑板205设于绑缚腿带201的外表面,用于支撑固定绑缚腿带201。
49.在一个具体的实施例中,腿部绑缚装置20为一个,动力模组104为一个,动力模组104与腿部绑缚装置20相连。当使用者的一条腿行走困难时,使用一个腿部绑缚装置20即可辅助使用者顺利行走。
50.在另一个具体的实施例中,腿部绑缚装置20为两个,动力模组104为两个。一个动力模组104与一个腿部绑缚装置20相连。当使用者的两条腿都行走困难时,使用两个腿部绑缚装置20辅助使用者顺利行走。
51.综上,本申请的机器人可以辅助使用者抬腿走路,而且结构简单,体积小,减速比大,结构稳定,适用范围广。
52.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要
求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1