用于具有惯性传感器的膝关节外科手术的方法和装置与流程
用于具有惯性传感器的膝关节外科手术的方法和装置
[0001]
相关申请的交叉引用本申请要求2018年6月20日提交的标题为“用于具有惯性传感器的膝关节外科手术的方法和装置(methods and device for knee surgery with inertial sensors)”的序列号62/687,462的美国临时专利申请的权益,其公开内容通过引用并入本文。
技术领域
[0002]
本公开涉及与计算机辅助的外科手术和计算机计划的外科手术相关的装置、方法和技术。
背景技术:
[0003]
计算机辅助的外科手术已经显示出提高了大多数大关节,特别是髋关节和膝关节的矫形外科手术的精度。常规的膝关节置换外科手术需要具有大量独特外科手术器械的若干手术托盘,其中每个外科手术托盘都昂贵、沉重并且需要消毒以便重新使用。在计算机辅助的外科手术领域中已经开发了技术以减少器械的数量,同时保持或稍微提高精度。这些技术的当前配置包括外科手术机器人、光学导航和基于惯性传感器的器械。
[0004]
这些当前系统中的每一个都具有固有的优点和缺点。例如,机器人系统昂贵、体积大,并且通常需要大量时间来设置、拆卸和执行外科手术。光学系统也是昂贵的,遭受视线问题,并且需要与机器人类似的时间来设置和拆卸。惯性系统在其大多数当前形式中由于技术上的缺点而需要大量手动器械来约束自由度,通常需要至少一个或两个器械托盘。因此,需要一种技术来提高外科手术精度,而没有当前技术的成本、空间限制和资本设备要求。
技术实现要素:
[0005]
本文公开了作为用于膝关节外科手术的计算机辅助外科手术导航系统的一部分的技术、方法和装置以及用于支持该技术、方法和装置的器械,使得可以利用最少的器械以“即时”方式递送导航系统。
[0006]
本发明的第一方面是提供一种经由计算机系统导航切割器械的方法,所述方法包括:(a)将患者特定解剖测绘仪(pam)以单个已知位置和取向安装到人,其中所述pam包括正确地仅以单个位置和取向与人表面精确且正确地匹配的表面;(b)将参考惯性测量单元(imu)安装到所述人;(c)将引导件可操作地耦合到pam,其中引导件包括器械惯性测量单元(imu)以及切割槽和销孔中的至少一个;(d)从所述参考imu和所述器械imu输出指示所述引导件相对于所述人的位置和取向的变化的数据;(e)将所述引导件相对于所述人重新定位到与用于执行切割和销放置中的至少一个的计划一致的位置和取向;以及(f)使用从参考imu和器械imu输出的数据,视觉地显示关于引导件相对于人的位置和取向的反馈,该数据由计算机程序处理,并且计算机程序引导视觉地显示的反馈。
[0007]
在第一方面的更详细的实施例中,pam被安装到胫骨和股骨中的至少一个。在又另
一更详细的实施例中,参考imu安装到胫骨和股骨中的至少一个。在进一步详细的实施例中,将所述引导件可操作地耦合到所述pam包括:使用包括至少两个接头的机械连接件,以允许独立于所述pam而重新定位所述切割引导件。在再一个详细实施例中,所述至少两个接头包括旋转接头和球形接头中的至少一个。在更详细的实施例中,至少两个接头包括一对旋转接头和球形接头。在更详细的实施例中,该方法还包括:在参考imu和器械imu中的至少一个相对于人处于已知位置和取向时,相对于器械imu配准参考imu。在另一更详细的实施例中,器械imu可仅在单个已知位置和取向上安装到引导件。在又另一更详细的实施例中,参考imu可在多个位置和取向安装到患者。在再另一更详细的实施例中,相对于器械imu配准参考imu包括保持imu相对于彼此静止预定的时间段。
[0008]
在第一方面的又另一更详细实施例中,相对于人重新定位引导件包括相对于pam重新定位引导件。在又另一更详细的实施例中,该方法还包括使用可操作地耦合到器械imu的负载测量装置进行评估,以评估膝关节松弛。在进一步详细的实施例中,所述计划包括用于放置所述销的计划。在再一个详细实施例中,视觉地显示反馈包括显示患者解剖结构的虚拟模型和反映引导件相对于患者解剖结构的位置的参考标记。在更详细的实施例中,视觉地显示反馈包括显示患者解剖结构的虚拟模型和反映虚拟模型上的切口的预期位置的参考标记。在更详细的实施例中,该方法还包括将至少一个销安装到患者的经切除部位(resected aspect),使用至少一个销相对于患者取向静止切割引导件,以及在取向静止切割引导件之后将静止切割引导件安装到患者。在另一更详细的实施例中,该方法还包括将至少一个销安装到患者的经切除部位,使用至少一个销使引导脚相对于患者取向,在取向引导脚之后将引导脚安装到患者,断开pam与引导件之间的操作性耦合,以及将引导件可操作地耦合到引导脚。
[0009]
本发明的第二方面是提供一种外科手术设备系统,包括:(a)第一惯性测量单元(imu),其具有陀螺仪、加速度计和磁力计;(b)第二惯性测量单元(imu),其具有陀螺仪、加速度计和磁力计,所述第二imu被配置成安装到参考装置,其中所述参考装置被配置成安装到患者解剖结构;(c)患者特定解剖测绘仪(pam),其包括仅在单个位置和取向上与患者解剖结构表面精确且正确地匹配的表面,其中所述pam被配置成安装到所述患者解剖结构表面;以及(d)引导件,其被配置成在使用时可操作地耦合到pam,引导件包括切割槽和销孔中的至少一种,引导件被配置成在预定的已知位置和取向上耦合到第一imu。
[0010]
在第二方面的更详细实施例中,该系统还包括控制器,该控制器包括具有预加载患者解剖结构的至少一个虚拟解剖结构模型和术前外科手术计划的软件,该术前外科手术计划指示预期的骨切除相对于患者解剖结构的至少一个虚拟解剖结构模型的位置和取向,控制器被配置成耦合通信地耦合到第一imu和第二imu以接收imu数据并且转换所接收的imu数据以确定引导件相对于患者解剖结构的位置和取向,并且为显示器输出指令以视觉地表示患者解剖结构的虚拟解剖结构模型并且提供关于引导件是否相对于患者解剖结构定位成与术前外科手术计划一致的引导以实现预期的骨切除。在又另一更详细的实施例中,患者特定解剖测绘仪(mapper)被配置成接合近侧胫骨和远侧股骨中的至少一个。在进一步详细的实施例中,患者特定解剖测绘仪包括第一胫骨pam和第二股骨pam。在又一个详细实施例中,该系统还包括可操作以将引导件耦合到pam的机械连接件,该机械连接件包括至少一个接头。在更详细的实施例中,至少一个接头包括至少两个接头。在更详细的实施例
中,至少两个接头包括旋转接头和球形接头。在另一更详细的实施例中,至少两个接头包括一对旋转接头。在又另一更详细的实施例中,机械连接件被配置成同时安装到pam的第一预定位置和引导件的第二预定位置以采取配准位置和取向。在再另一更详细的实施例中,所述系统还包括负载测量装置,所述负载测量装置被配置成在已知位置和取向上耦合到所述第一imu。
[0011]
在第二方面的又另一更详细的实施例中,负载测量装置包括多个压阻传感器、多个电容传感器和多个基于压电的应变传感器中的至少一个。在又另一更详细的实施例中,所述系统还包括矫形植入物放置装置,所述矫形植入物放置装置被配置成在已知位置和取向上耦合到所述第一imu。在进一步详细的实施例中,矫形植入物放置装置被配置成在预定位置和取向上耦合到矫形植入物,其中矫形植入物包括矫形试验物和最终矫形植入物中的至少一个。在再一个详细实施例中,矫形植入物包括胫骨植入物和股骨植入物中的至少一个,作为膝关节置换外科手术或膝关节翻修外科手术中的至少一个的一部分。在更详细的实施例中,该系统还包括耦合通信地耦合到控制器的显示器,该显示器可操作以视觉地表示患者解剖结构的虚拟解剖结构模型,并且提供关于引导件是否相对于患者解剖结构与术前外科手术计划一致地定位以实现预期的骨切除的引导。在更详细的实施例中,显示器包括多个显示窗口。在另一更详细的实施例中,多个显示窗口中的每一个与独立屏幕相关联。在又另一更详细的实施例中,该系统还包括矫形植入物,该矫形植入物包括最终矫形植入物和矫形试验物中的至少一个。在再另一更详细的实施例中,最终的矫形植入物包括全膝关节置换或部分膝关节置换的部件。
[0012]
在第二方面的更详细的实施例中,最终的矫形植入物包括全膝关节置换的患者特定的股骨部件和患者特定的胫骨部件中的至少一个。在又另一更详细的实施例中,该系统还包括引导脚,所述引导脚被配置成当引导脚安装到患者解剖结构时可操作地耦合到引导件以便有利于至少一个骨切割。
[0013]
本发明的第三方面是提供一种经由计算机系统使用惯性测量单元来促进外科手术工具的三维跟踪的方法,所述方法包括:(a)将第一惯性测量单元(imu)安装到第一哺乳动物组织,使得所述第一imu不能相对于所述第一哺乳动物组织重新定位;(b)通过使用患者特定解剖测绘仪(pam)将第二惯性测量单元(imu)可操作地耦合至所述第一哺乳动物组织,所述患者特定解剖测绘仪具有仅在单个位置和取向中与所述第一哺乳动物组织的表面精确且正确地匹配的表面,所述第二imu相对于所述第一哺乳动物组织是可重新定位的;(c)在所述pam被安装到所述第一哺乳动物组织的同时,配准所述第二imu相对于所述第一哺乳动物组织和所述第一imu的位置和取向;(d)将所述第二imu安装到外科手术工具;以及(e)在第二imu安装到外科手术工具并且可重新定位地耦合到pam时,在三维中跟踪外科手术工具和第一哺乳动物组织的位置和取向。
[0014]
在第三方面的更详细的实施例中,该方法还包括:使用从第一imu和第二imu输出的数据来视觉地显示关于外科手术工具相对于第一哺乳动物组织的位置和取向的反馈,该数据由计算机程序处理并且计算机程序引导视觉地显示的反馈。在又另一更详细的实施例中,反馈包括第一哺乳动物组织的虚拟模型和虚拟模型上的第一标记,该第一标记指示外科手术工具相对于第一哺乳动物组织的相对真实世界位置。在进一步详细的实施例中,反馈还包括虚拟模型上的第二标记,其指示与预定计划一致的外科手术工具相对于第一哺乳
动物组织的预期位置。在再一个更详细的实施例中,pam被安装到胫骨和股骨中的至少一个上。在更详细的实施例中,第一哺乳动物组织包括胫骨和股骨中的至少一个。在更详细的实施例中,外科手术工具可操作地耦合到pam。在另一更详细的实施例中,将外科手术工具可操作地耦合到pam包括使用包括至少两个接头的机械连接件以允许外科手术工具独立于pam而重新定位。在又另一更详细的实施例中,所述至少两个接头包括旋转接头和球形接头中的至少一个。在再另一更详细的实施例中,所述至少两个接头包括一对旋转接头和球形接头。
[0015]
在第三方面的又另一更详细的实施例中,第二imu可仅在单个已知位置和取向上安装到外科手术工具。在又另一更详细的实施例中,第一imu能够以多个位置和取向安装到第一哺乳动物组织。在进一步详细的实施例中,第二imu相对于第一哺乳动物组织的位置和取向包括保持第一和第二imu相对于彼此静止达预定的时间段。在再一个详细的实施例中,该方法还包括利用可操作地耦合到第二imu的负载测量装置进行评估,以评估膝关节的松弛。
[0016]
本发明的第四方面是提供一种用于膝关节置换或翻修手术的外科手术设备工具包,包括:(a)第一惯性测量单元(imu),其具有陀螺仪、加速度计和磁力计;(b)第二惯性测量单元(imu),其具有陀螺仪、加速度计和磁力计;(c)胫骨患者特定解剖测绘仪(pam),所述pam包括仅在单个位置和取向上与胫骨表面精确且正确地匹配的表面,其中所述胫骨pam被配置成安装到所述胫骨表面;以及(d)股骨患者特定解剖测绘仪(pam),其包括仅在单个位置和取向上与股骨表面精确且正确地匹配的表面,其中股骨pam被配置成安装到股骨表面,其中第二imu被配置成可操作地耦合到胫骨pam和股骨pam中的至少一个。
[0017]
在第四方面的更详细的实施例中,工具包还包括切割引导件,其配置成可重新定位地耦合到胫骨pam和股骨pam中的至少一个上,切割引导件包括切割槽和销孔中的至少一种,该引导件配置成以预定的已知位置和取向耦合到第一imu。在又另一更详细的实施例中,工具包还包括机械连接件,其包括至少两个接头,以将切割引导件可操作地耦合到胫骨pam和股骨pam中的至少一个。在进一步详细的实施例中,矫形植入物包括非患者特定植入物。在再一个详细实施例中,非患者特定植入物包括股骨髁和胫骨托插入物。在更详细的实施例中,非患者特定植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在更详细的实施例中,工具包还包括参考壳体,其配置成刚性地安装到胫骨和股骨中的至少一个上,参考壳体配置成仅在单个位置和取向上正确地安装到第一imu上。在另一更详细的实施例中,工具包还包括4合1的静止切割块。在又另一更详细的实施例中,工具包还包括4合1可重新配置的切割块。在再另一更详细的实施例中,该工具包还包括物理存储装置,其上存储有计算机可读代码,当计算机执行该代码时,所述代码可操作以提供与术前计划一致的外科手术导航引导。
[0018]
在第四方面的又另一更详细的实施例中,批量定制的植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在又另一更详细的实施例中,所述至少两个接头包括旋转接头和球形接头中的至少一个。在进一步详细的实施例中,所述至少两个接头包括一对旋转接头和球形接头。在再一个详细实施例中,该工具包还包括矫形植入物,其配置成置换膝关节的至少一部分。在更详细的实施例中,矫形植入物包括患者特定植入物。在更详细的实施例中,患者特定植入物包括股骨髁和胫骨托插入物。在另一更详细的实
施例中,患者特定植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在又另一更详细的实施例中,矫形植入物包括批量定制的植入物。在又另一更详细的实施例中,批量定制的植入物包括股骨髁和胫骨托插入物。在又另一更详细的实施例中,所述工具包包括可以被访问以提供存储的计算机可读代码的互联网地址的副本,所述存储的计算机可读代码在由计算机执行时可操作以提供与术前计划一致的外科手术导航引导。
[0019]
本发明的第五方面是提供一种用于膝关节置换或翻修手术的外科手术设备工具包,包括:(a)胫骨患者特定解剖测绘仪(pam),所述pam包括仅在单个位置和取向上与胫骨表面精确且正确地匹配的表面,其中所述胫骨pam被配置成安装到所述胫骨表面;以及(b)股骨患者特定解剖测绘仪(pam),其包括仅在单个位置和取向上与股骨表面精确且正确地匹配的表面,其中股骨pam被配置成安装到股骨表面。
[0020]
在第五方面的更详细的实施例中,工具包还包括具有陀螺仪、加速度计和磁力计的第一惯性测量单元(imu),具有陀螺仪、加速度计和磁力计的第二惯性测量单元(imu),其中第二imu被配置为可操作地耦合到胫骨pam和股骨pam中的至少一个。在又另一更详细的实施例中,工具包还包括切割引导件,其配置成可重新定位地耦合到胫骨pam和股骨pam中的至少一个,切割引导件包括切割槽和销孔中的至少一种,该引导件配置成以预定的已知位置和取向耦合到第一imu上。在进一步详细的实施例中,工具包还包括机械连接件,其包括至少两个接头,以将切割引导件可操作地耦合到胫骨pam和股骨pam中的至少一个。在再一个详细实施例中,所述至少两个接头包括旋转接头和球形接头中的至少一个。在更详细的实施例中,至少两个接头包括一对旋转接头以及球形接头。在更详细的实施例中,该工具包还包括矫形植入物,其配置成置换膝关节的至少一部分。在另一更详细的实施例中,矫形植入物包括患者特定植入物。
[0021]
在第五方面的更详细的实施例中,患者特定的植入物包括股骨髁和胫骨托插入物。在又另一更详细的实施例中,患者特定植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在进一步详细的实施例中,矫形植入物包括批量定制的植入物。在再一个详细的实施例中,批量定制的植入物包括股骨髁和胫骨托插入物。在更详细的实施例中,批量定制的植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在更详细的实施例中,矫形植入物包括非患者特定植入物。在另一更详细的实施例中,非患者特定植入物包括股骨髁和胫骨托插入物。在又另一更详细的实施例中,非患者特定植入物包括具有一对髁的股骨植入物和具有一对髁接纳件的胫骨托插入物。在再另一更详细的实施例中,工具包还包括配置成刚性地安装到胫骨和股骨中的至少一个的参考壳体,参考壳体配置成仅在单个位置和取向上正确地安装到第一imu上。
[0022]
在第五方面的又另一更详细的实施例中,工具包还包括4合1的静止切割块。在又另一更详细的实施例中,工具包还包括4合1可重新配置的切割块。在进一步详细的实施例中,该工具包还包括物理存储装置,其上存储有计算机可读代码,当计算机执行该代码时,所述代码可操作以提供与术前计划一致的外科手术导航引导。在再一个详细的实施例中,该工具包还包括可以被访问以提供存储的计算机可读代码的互联网地址的副本,所述代码在由计算机执行时可操作以提供与术前计划一致的外科手术导航引导。在更详细的实施例中,所述工具包还包括负载测量装置,所述负载测量装置被配置成以已知的位置和取向耦合到所述第一imu。在更详细的实施例中,负载测量装置包括多个压阻传感器、多个电容传
感器和多个基于压电的应变传感器中的至少一个。在另一更详细的实施例中,所述工具包还包括矫形植入物放置装置,所述矫形植入物放置装置被配置成以已知的位置和取向耦合到所述第二imu。在又另一更详细的实施例中,矫形植入物放置装置被配置成仅在预定位置和取向上正确地耦合到矫形植入物。
[0023]
本发明的第六方面是提供一种外科手术导航系统,包括:(a)胫骨患者特定解剖测绘仪(pam),所述pam包括仅在单个位置和取向上与胫骨表面精确且正确地匹配的表面,其中所述胫骨pam被配置成安装到所述胫骨表面;(b)股骨患者特定解剖测绘仪(pam),其包括仅在单个位置和取向上与股骨表面精确且正确地匹配的表面,其中所述股骨pam被配置成安装到所述股骨表面;(c)第一惯性测量单元(imu),其具有陀螺仪、多个加速度计以及磁力计;(d)第一发射器,其通信地耦合到所述第一imu;(e)第二惯性测量单元(imu),其具有陀螺仪、多个加速度计以及磁力计;(f)第二发射器,其通信地耦合到所述第二imu;(g)第一信号接收器,其通信地耦合到所述第一发射器和所述第二发射器;(h)切割引导件,其被配置成可操作地耦合到所述胫骨pam和所述股骨pam中的至少一个,所述引导件包括切割槽和销孔中的至少一个,所述切割引导件被配置成仅在单个位置和取向中正确地耦合到所述第一imu;以及(i)控制器,其通信地耦合到第一信号接收器,该控制器包括软件,该软件能够访问患者解剖结构的虚拟模型和指示相对于虚拟模型的预期切除术切割的术前外科手术计划。
[0024]
在第六方面的更详细的实施例中,所述系统还包括通信地耦合到所述控制器的视觉显示器,其中控制器软件被配置成处理来自所述第一imu和所述第二imu的数据以确定所述切割引导件相对于所述患者解剖结构的位置和取向,并且输出用于所述视觉显示器的指令以视觉地表示所述患者解剖结构的虚拟模型,并且提供关于所述切割引导件是否相对于所述患者解剖结构定位成与所述术前外科手术计划一致的引导以实现所述预期切除术切割。在又另一更详细的实施例中,胫骨pam被配置成接合胫骨的近侧部分,而股骨pam被配置成接合股骨的远侧部分。在进一步详细的实施例中,该系统还包括机械连接件,其可操作以将切割引导件耦合到胫骨pam和股骨pam中的至少一个,该机械连接件包括至少一个接头。在再一个详细实施例中,所述至少一个接头包括至少两个接头。在更详细的实施例中,至少两个接头包括旋转接头和球形接头。在更详细的实施例中,至少两个接头包括一对旋转接头。在另一更详细的实施例中,机械连接件配置成同时安装到胫骨pam和股骨pam中的至少一个的第一预定位置和切割引导件的第二预定位置以采取配准位置和取向。
[0025]
在第六方面的更详细实施例中,该系统还包括负载测量装置,其被配置成在已知位置和取向上耦合到第一imu。在又另一更详细的实施例中,负载测量装置包括多个压阻传感器、多个电容传感器和多个基于压电的应变传感器中的至少一个。在进一步详细的实施例中,所述系统还包括矫形植入物放置装置,所述矫形植入物放置装置被配置成在已知位置和取向上耦合到所述第一imu。在再一个详细实施例中,矫形植入物放置装置被配置成在预定位置和取向上耦合到矫形植入物,其中矫形植入物包括矫形试验物和最终矫形植入物中的至少一个。在更详细的实施例中,矫形植入物包括胫骨植入物和股骨植入物中的至少一个,作为膝关节置换外科手术或膝关节翻修外科手术中的至少一个的一部分。在更详细的实施例中,视觉显示器包括多个显示窗口。在另一更详细的实施例中,多个显示窗口中的每一个与独立屏幕相关联。在又另一更详细的实施例中,该系统还包括矫形植入物,该矫形
植入物包括最终矫形植入物和矫形试验物中的至少一个。在再另一更详细的实施例中,最终的矫形植入物包括全膝关节置换或部分膝关节置换的部件。在又另一更详细的实施例中,最终的矫形植入物包括全膝关节置换的患者特定的股骨部件和患者特定的胫骨部件中的至少一个。在又另一更详细的实施例中,该系统还包括引导脚,所述引导脚被配置成当引导脚安装到患者解剖结构时可操作地耦合到切割引导件以便有利于至少一个骨切割。
[0026]
本发明的第七方面是提供一种进行外科手术的方法,所述外科手术包括使用显示在视觉显示器上的导航引导来重新定位切割引导件,所述切割引导件包括第一惯性测量单元(imu),所述切割引导件可操作地耦合到股骨患者特定解剖测绘仪(pam),所述股骨患者特定解剖测绘仪包括仅在单个位置和取向上与股骨表面精确且正确地匹配的表面,其中所述导航引导包括所述切割引导件的虚拟模型和患者股骨的虚拟模型中的至少一个,以及使用来自所述第一imu的数据的关于所述切割引导件相对于所述患者股骨的三维位置的指示,其中所述导航引导还包括用于重新定位所述切割引导件以使股骨切割与术前外科手术计划一致的引导。
[0027]
在第七方面的更详细实施例中,该方法还包括使用显示在视觉显示器上的导航引导来重新定位切割引导件,切割引导件包括第一惯性测量单元(imu),切割引导件可操作地耦合到胫骨患者特定解剖测绘仪(pam),胫骨患者特定解剖测绘仪包括仅在单个位置和取向上与胫骨表面精确且正确地匹配的表面,其中导航引导包括切割引导件的虚拟模型和患者胫骨的虚拟模型中的至少一个,以及使用来自第一imu的数据的关于切割引导件相对于患者胫骨的三维位置的指示,其中导航引导还包括用于重新定位切割引导件以使胫骨骨切割与术前外科手术计划一致的引导。在又另一更详细的实施例中,该方法还包括将股骨pam表面以正确的单个位置和取向安装到患者股骨表面,将第二惯性测量单元(imu)耦合到患者股骨,以及将第一imu和第二imu相对于彼此配准。在进一步详细的实施例中,该方法还包括将胫骨pam表面以正确的单个位置和取向安装到患者胫骨表面,将第二惯性测量单元(imu)耦合到患者胫骨,以及将第一imu和第二imu相对于彼此配准。在再一个详细实施例中,导航引导仅包括切割引导件的虚拟模型。在更详细的实施例中,导航引导仅包括患者股骨的虚拟模型。在更详细的实施例中,除了表示切割引导件的真实世界位置的第一切割线和表示用于进行股骨切割和胫骨切割中的至少一个的切割引导件的预期术前计划位置的第二切割线之外,导航引导还包括患者股骨的虚拟模型和患者胫骨的虚拟模型中的至少一个。
[0028]
在进一步详细的实施例中,所述方法还包括:使用由所述切割引导件引导的外科手术锯进行股骨切割,以及使用在所述视觉显示器上显示的导航引导重新定位所述切割引导件,所述切割引导件包括所述第一惯性测量单元(imu)并且可操作地耦合到所述股骨患者特定解剖测绘仪(pam),其中所述导航引导包括所述切割引导件的虚拟模型和所述患者股骨的虚拟模型中的至少一个,以及使用来自所述第一imu的数据的关于所述切割引导件相对于所述患者股骨的三维位置的指示,其中所述导航引导还包括用于重新定位所述切割引导件以使随后的股骨切割与所述术前外科手术计划一致的引导。在再一个详细实施例中,所述方法还包括:使用由所述切割引导件引导的外科手术锯进行股骨切割,其中所述股骨切割是远侧切除,以及使用在所述视觉显示器上显示的导航引导重新定位所述切割引导件,所述切割引导件包括所述第一惯性测量单元(imu)并且可操作地耦合到所述股骨患者
特定解剖测绘仪(pam),其中所述导航引导包括所述切割引导件的虚拟模型和所述患者股骨的虚拟模型中的至少一个,以及使用来自所述第一imu的数据的关于所述切割引导件相对于所述患者股骨的三维位置的指示,其中所述导航引导还包括用于重新定位所述切割引导件以与术前外科手术计划一致地在所述经切除的股骨中钻孔的引导。在更详细的实施例中,该方法还包括:使用由切割引导件引导的外科手术钻在经切除的股骨股骨中钻孔,将外科手术销插入钻孔中,使用插入的外科手术销将4合1切割引导件重新定位成抵靠经切除的股骨以便对准,以及使用来自4合1切割引导件的引导进行至少一个股骨切除术切割。在更详细的实施例中,该方法还包括:使用由切割引导件引导的外科手术钻在经切除的股骨股骨中钻孔,将外科手术销插入钻孔中,使用插入的外科手术销将固定位置切割引导件重新定位成抵靠经切除的股骨以便对准,以及使用来自固定位置切割引导件的引导进行至少一个股骨切除术切割。
附图说明
[0029]
图1是描绘根据本公开的示例性图像引导外科手术系统的部分的图。
[0030]
图2是示出根据本公开的示例性序列的概观的图,其中术前图像最终被转换成手术工具包和外科手术引导指令。
[0031]
图3是远侧股骨的立视透视图,其示出了安装在所述远侧股骨上的图像引导外科手术系统的示例性部件。
[0032]
图4是远侧股骨的立视透视图,其示出了安装在所述远侧股骨上的图像引导外科手术系统的示例性和替代示例性部件。
[0033]
图5是将三角法与远侧股骨切除平面的可能位置相关联的一系列图示。
[0034]
图6是远侧股骨的端视图,示出了安装到所述远侧股骨上的示例性患者解剖测绘仪,以及识别出内侧-外侧的尺寸以及前侧-后侧的尺寸。
[0035]
图7是跨解剖统计图集内的群体取得的来自远侧股骨的若干不同患者解剖表面以及如何使用通用模型的图形图示,在创建患者解剖测绘仪时可以将模型变形为患者特定的。
[0036]
图8是根据本公开的相同示例性切割引导件和机械连接件的轮廓图和俯视图。
[0037]
图9是根据本公开的相同的替代示例性切割引导件和机械连接件的正视图和俯视图。
[0038]
图10是根据本公开的另一替代示例性切割引导件的俯视图。
[0039]
图11是根据本公开的示例性销引导件和机械连接件的俯视图。
[0040]
图12是反映可以如何识别统计图集内的自动界标的图形汇编。
[0041]
图13是三个重叠股骨的远端视图,示出了用于全膝关节置换术的远侧切除的内侧-外侧宽度的差异。
[0042]
图14包括来自统计图集的股骨的一系列远端视图,其示出了对于不同大小的股骨,对于远侧切除术切割去除了多少骨。
[0043]
图15是叠加平面图,示出了股骨的远侧处切除深度的变化如何导致逐渐更多的骨被去除。
[0044]
图16是统计图集群体上的统计分布,示出了内侧-外侧切除宽度在群体上如何变
化。
[0045]
图17是远侧股骨,示出了可在三个位置之间重新定位的示例性切割引导件,其中多个另外的位置是可能的,并且示出了可如何通过围绕下旋转接头枢转来改变切割引导件的位置。
[0046]
图18是来自根据本系统和公开的显示器的屏幕截图,其示出了虚拟远侧股骨模型以及示出切除相对于模型的术前预期位置的虚线。
[0047]
图19是示出可在多个位置之间重新定位的示例性切割引导件的远侧股骨,其中多个另外的位置是可能的,并且示出可如何通过重新定位上球形接头来改变切割引导件的位置。
[0048]
图20是来自根据本系统和公开的显示器的屏幕截图,其示出了虚拟远侧股骨模型以及示出切除相对于模型的术前预期位置的第一虚线,以及示出切割引导槽相对于患者解剖结构的实际位置的第二虚线。
[0049]
图21是从股骨的远端观察的立体透视图,所述股骨具有根据本公开的安装到其上的部件以及用于根据本公开的数学计算的参考点。
[0050]
图22是股骨的侧视图,该股骨具有根据本公开的安装到其上的部件和用于根据本公开的数学计算的参考点,特定于下接头。
[0051]
图23是股骨的侧视图,该股骨具有根据本公开的安装到其上的部件和用于根据本公开的数学计算的参考点,特定于上接头。
[0052]
图24是股骨的立视透视图,该股骨具有根据本公开的安装到其上的部件和用于根据本公开的数学计算的参考点,特定于上球形接头。
[0053]
图25是股骨的远端的立视透视图,示出了根据本公开的安装在所述股骨的远端上的部件,并且所述部件用于引导外科手术锯,作为进行远侧股骨切除术切割的一部分。
[0054]
图26是股骨的远端的立视透视图,其示出了在进行远侧股骨切除术切割之后的安装在所述股骨的远端上的根据本公开的部件。
[0055]
图27是股骨的远端的立视透视图,其示出了根据本公开的安装在所述股骨的远端上的部件,并且在进行远侧股骨切除术切割之后,在预期将外科手术销放置到经切除的股骨中时,使切割引导件重新定位。
[0056]
图28是股骨的远端的立视透视图,其示出了根据本公开的安装在所述股骨的远端上的部件,在进行远侧股骨切除术切割之后,预期将外科手术销放置到经切除的股骨中。
[0057]
图29是来自根据本系统和公开的显示器的屏幕截图,其示出了第一虚拟远侧股骨模型和示出切除相对于模型的术前预期位置的第一虚线,以及示出切割引导槽相对于患者解剖结构(对于前切和后切)的实际位置的第二虚线,以及来自示出了远侧切除和尚未切除的股骨区域的轮廓图的第二虚拟模型。
[0058]
图30是股骨的远端的立视透视图,其示出了根据本公开的安装在所述股骨的远端上的部件,并且所述部件具有使用如图28所示安装的销安装到经切除的股骨上的4合1切割引导件。
[0059]
图31是根据tka术前计划在进行五个切除术切割之后股骨的远端的轮廓图。
[0060]
图32是股骨的远端的立视透视图,其示出了根据本公开的从所述股骨的远端拆卸下来的部件。
[0061]
图33是股骨的远端的立视透视图,其示出了根据本公开的安装在所述股骨的远端上的部件,包括替代pam的引导脚。
[0062]
图34是股骨的远端的立视透视图,其示出了根据本公开的安装在股骨的远端上的部件,并所述部件用于引导外科手术锯,作为进行前股骨切除术切割的一部分。
[0063]
图35是来自根据本系统和公开的显示器的屏幕截图,其示出了第一虚拟远侧股骨模型和示出前切除相对于模型的术前预期位置的第一虚线,以及示出切割引导槽相对于患者解剖结构的实际位置的第二虚线。
[0064]
图36是股骨的远端的立视透视图,其示出了根据本公开的部件,所述部件安装到股骨的远端上并且用于引导外科手术锯,作为进行后股骨切除术切割的一部分。
[0065]
图37是股骨的远端的立视透视图,其示出了根据本公开的部件,其安装在股骨的远端上并且用于引导外科手术锯,作为进行前斜切股骨切除术切割的一部分。
[0066]
图38是股骨的远端的立视透视图,其示出了根据本公开的部件,所述部件安装到股骨的远端上并且用于引导外科手术锯,作为进行后斜切股骨切除术切割的一部分。
[0067]
图39是胫骨的近端的前视图,其示出了根据本公开的部件,所述部件安装到所述胫骨的近端,并且预期在进行近侧胫骨切除术切割时重新定位切割引导件。
[0068]
图40是图39的胫骨和部件的立视透视图。
[0069]
图41是根据本公开的安装到胫骨试验物的示例性放置装置的立视透视图。
[0070]
图42是根据本公开的负载测量装置的立视透视图。
[0071]
图43是示出了可包括根据本公开的外科手术工具包的示例性部件的图。
具体实施方式
[0072]
本公开的示例性实施例在下面被描述和图示以涵盖与计算机辅助外科手术和计算机计划的外科手术相关的示例性装置、方法和技术。当然,对于本领域普通技术人员来说将显而易见的是,以下讨论的实施例本质上是示例性的,并且可以在不脱离本发明的范围和精神的情况下被重新配置。然而,为了清楚和精确,如下讨论的示例性实施例可以包括普通技术技术人员应当认识到的不是落入本发明范围内的必要条件的可选步骤、方法和特征。
[0073]
参考图1-图3,根据本公开的供外科医生101或其他人员使用的图像引导外科手术系统100可以包括工作站102,其包括计算机/控制器和通信地耦合到一个或多个视觉显示器106和输入装置109(例如,键盘、鼠标等)的相关软件104以及外科手术器械170、190,以便于与矫形置换或翻修外科手术相关的外科手术导航。在示例性形式中,本外科手术将涉及全膝关节置换术置换或翻修手术。然而,本领域技术人员将理解的是,示例性技术、系统、软件和部件可以用作任何矫形置换或翻修外科手术的一部分,并且决不限于膝盖。
[0074]
在该示例性实施例中,相关软件104包括利用组织模型(其可包括骨和软组织模型)114的外科手术导航软件,该组织模型可特定于患者110。作为示例,可以在外科手术期间或之前使用足以产生一个或多个患者特定虚拟组织模型114的任何已知成像模式112进行患者110的成像,已知成像模式包括但不限于x射线、荧光透视、超声、ct、mri。从使用至少一种成像模式112的数据输出,可以使用骨重建领域的技术人员已知的各种方法中的任何一种来创建一个或多个患者特定的虚拟组织模型114。例如,对于膝关节手术,示例性患者
特定虚拟组织模型可以包括但不限于股骨、胫骨和髌骨的骨,与这些骨中的一个或多个相关联的软骨,以及结缔韧带组织。作为虚拟组织模型114的一部分,软件104可上载有反映骨相对于彼此的相对位置的数据,使得模型的静止姿态在运动范围内可用,且另外或替代地,模型的动态图像可用于示出模型在运动范围内相对于彼此的虚拟运动。这些动态图像可以直接从某些模式中提取,诸如但不限于荧光透视法,或者可以使用计算机模拟软件利用运动范围内的大量静止姿态来外推。
[0075]
示例性软件104可利用虚拟组织模型114来创建或结合术前外科手术计划以实现膝关节置换或翻修。作为示例性外科手术计划的一部分,一个或多个矫形植入物的虚拟模型120可被加载或创建,并且然后测试配合到虚拟组织模型114上,以便识别(一个或多个)植入物的尺寸、需要进行的骨切除(切除术切割)以及最终的(一个或多个)矫形植入物的正确放置。作为示例,示例性软件104结合静态规划器122,其允许将矫形植入物120的虚拟模型配合到患者的虚拟骨模型114中的至少一个上,以便评估配合、尺寸确定、解剖界标的识别和用于接收最终植入物的骨切口位置。作为该静态规划器122的一部分,一旦虚拟植入物被选择并且其位置相对于虚拟组织模型114被最终确定,规划器就可以计算实现矫形植入物的植入所需的骨切口(对于实际患者骨)的位置。该静态规划器122与作为软件102的一部分的可用的动态规划器124形成对比,所述动态规划器允许虚拟组织模型114和矫形植入物模型120作为统一单元的同时重新定位,使得可以评估用于确定被切除的患者骨上的植入物类型、形状、尺寸和位置的运动学因素。本领域技术人员熟悉外科医生用于区分矫形植入物和外科医生使用运动学数据选择矫形植入物的因素的运动学考虑。作为该动态规划器124的一部分,一旦虚拟植入物被选择并且其位置相对于虚拟组织模型114被最终确定,规划器就可以计算实现矫形植入物的植入所需的骨切口(对于实际患者骨)的位置。
[0076]
在创建或上传术前外科手术计划之后,可以使用术前计划来创建用于股骨、胫骨和/或髌骨的定制器械,其包括但不限于患者解剖测绘仪(pam)130和切割引导件190。
[0077]
pam 130包括患者特定装置,该患者特定装置仅在单个已知位置和取向上匹配患者解剖结构,并且可以使用外科手术销210安装到患者。作为示例,pam 130可以具有一个表面,该表面具有与患者解剖结构精确匹配的负几何形状(换言之,pam的表面形状精确地遵循患者解剖结构的表面,包括形状变化,使得患者波谷将反映pam波峰,而患者波峰将反映pam波谷)。通过利用仅在单个位置和取向上适合患者解剖结构的pam,具有已知几何形状(大小、宽度、长度、高度等)的器械或其他部件可以附接到pam以促进器械或其他部件在由外科手术导航软件利用的参考系内的位置和取向的定位。换句话说,因为已知pam相对于患者解剖结构(例如,骨)的精确位置和取向,所以刚性地安装到pam的任何结构(具有已知尺寸)也将具有相对于患者解剖结构的已知位置和取向。并且pam可以与切割引导件190结合使用。
[0078]
根据本公开,示例性切割引导件190可借助于pam 130对准和定位。通过引言,示例性切割引导件190可以被可重新定位地安装到pam 130,使得pam被用于其参考位置,以已知切割引导件相对于患者的骨的位置和取向。相反地,或另外,切割引导件190可与pam 130脱离。在这种情况下,pam 130可以耦合到具有孔口的固定器(pinner),该孔口配置成仅在单个取向上接收对准销。使用所述固定器,一旦正确定位,两个或更多个销就插入到患者的骨中,使得销与示例性切割引导件的孔口对准(与pam 130分离)。以这种方式,示例性切割引
导件可以通过在销上滑动而对准,以便对准切割引导件,从而进行一个或多个骨切割。
[0079]
术前外科手术计划也可以用于创建计算机指令,在本文中称为患者病例文件或外科手术计划,其可以被加载到相关联的外科手术导航软件应用104中以促进相关外科手术仪器的实时引导。此外,可使用静态规划器122和/或动态规划器124创建或选择的外科手术所需的仪器和器械可被制造、包装、消毒并组装成工具包500以便以即时的方式递送。
[0080]
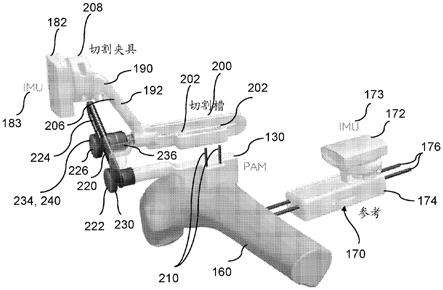
参考图3,患者110的远侧股骨160可以包括刚性参考170,其经由现有的外科手术切口或经皮地附接到患者骨。在示例性形式中,刚性参考170包括图像引导外科手术系统100的部件,并且可以包括安装到紧固到股骨160的一对销176的壳体174。刚性参考170通过壳体174与惯性测量单元装置172或与外科手术导航工作站102通信(有线或无线地)的其它跟踪装置耦合或包括它们而便于跟踪患者骨160。在示例性形式中,惯性测量单元(imu)装置172可以包括惯性测量单元(imu)173、电池和包含在单个壳体内的无线发射器,其中装置172可以操作用于创建数据并将数据传输到外科手术导航软件应用104。每个imu 173、183可以包括至少一个三轴加速度计、一个三轴磁力计和一个三轴陀螺仪。以这种方式,imu 173、183产生指示三个正交轴上的加速度的数据、磁性数据和陀螺仪数据,外科手术导航软件应用104使用这些数据来确定imu的位置和取向的变化。因此,通过使用刚性参考170将imu 173刚性安装到骨(例如股骨160)上,imu的位置和取向的变化可以快速和准确地归因于骨的位置和取向的变化。因此,通过已知imu 173如何根据时间被重新定位,外科手术导航软件应用104也能够确定在相同时间段内骨的位置和取向的变化。如下文将讨论的,通过相对于与切割引导件190相关联的第二imu装置182初始化刚性参考170的imu装置172,切割引导件相对于患者骨的相对位置可由外科手术导航软件应用104确定。
[0081]
回到图3,根据本公开的示例性切割引导件190被配置成可重新定位地安装到pam 130,以便引导外科医生进行一个或多个骨切割。该示例性切割引导件190可用于作为全膝关节置换术的一部分的股骨和胫骨切除中的每一个。
[0082]
在该示例性实施例中,切割引导件190包括引导件主体192,其具有至少一个切割槽200,用于沿着平面路径引导外科手术矢状锯或类似工具250(见图25),以进行一个或多个骨切割。引导件主体192还可以与槽200分开或除了槽之外还勾画出一个或多个通孔202,其尺寸被设计成允许外科手术销210的通过。作为示例,每个外科手术销210可以安装到患者的骨上,并且用于引导和耦合到固定位置切割块300(见图30)。在该示例性实施例中,引导件主体192包括终止于接收器208的颈部206,该接收器被配置成具有安装到其上的第二惯性测量装置182。
[0083]
作为示例,第二惯性测量装置182可以包括包含在单个壳体内的惯性测量单元(imu)183、电池和无线发射器,其中装置182可以操作以创建数据并将数据发射到外科手术导航软件应用104。
[0084]
如本文所公开的,每个imu 173、183可以包括三个陀螺仪、三个加速度计和三个霍尔效应磁力计(三个三轴陀螺仪、加速度计、磁力计的集合),它们可以集成到单个电路板中或者包括一个或多个传感器(例如,陀螺仪、加速度计、磁力计)的单独的板,以便输出关于彼此垂直的三个方向(例如,x、y、z方向)的数据。以这种方式,每个imu 173、183可以操作以从三个陀螺仪、三个加速度计和三个磁力计产生21个电压或数字输出。在示例性形式中,每个imu 173、183可以包括传感器板和处理板,其中传感器板包括包含三个加速度计、三个陀
螺仪传感器和三个磁力计(lsm9ds,st-microelectronics)的集成感测模块和包含三个加速度计和三个磁力计(lsm303,st-microelectronics)的两个集成感测模块。特别地,imu 173、183还可以包括角动量传感器,其测量至少三个轴的空间旋转变化:俯仰(上下)、偏航(左右)和滚动(顺时针或逆时针旋转)。以这种方式,imu 173、183产生指示三个正交轴上的加速度的数据、磁性数据和陀螺仪数据,外科手术导航软件应用104使用这些数据来确定每个imu的位置和取向的变化。
[0085]
通过将imu 183刚性地安装到切割引导件190上,每个imu 173、183的位置和取向的变化可以快速和精确地归因于切割引导件相对于患者骨的位置和取向的变化。因此,通过已知imu 183如何根据时间被重新定位,外科手术导航软件应用104也能够确定在相同时间段内切割引导件190的位置和取向的变化。如下文将讨论的,通过相对于与切割引导件190相关联的第二imu 183初始化刚性参考170的imu 173,切割引导件相对于患者骨的相对位置可由外科手术导航软件应用104确定。
[0086]
作为示例,切割引导件190可以具有任何数量的已知位置,使得当切割槽200被放置在这些已知位置之一中时,切割槽200相对于pam 130的位置是已知的。为了将切割引导件190可重新定位地安装到pam 130,在它们之间存在机械连接件220,其可以包括一个或多个接头。在示例性形式中,机械连接件220包括下接头222,调节器224和上接头226。
[0087]
作为示例,下接头222可以在pam 130与切割槽200的连接处或附近。下接头222可以包括旋转接头,该旋转接头包括螺栓或螺钉230(可选地弹簧加载的),该螺栓或螺钉230可以被拧紧以选择性地抑制调节器224相对于pam 130的旋转,并且因此在粗略的意义上调节切割槽200的位置。替代地,下接头222可以是允许调节器224相对于pam 130的选择性重新定位的任何接头或运动激活装置(马达驱动的),使得当需要时,调节器相对于pam的重新定位被基本上抑制。
[0088]
作为示例,调节器224可以包括椭圆形或延伸的环,下接头222的至少一部分接合所述环以固定和释放调节器相对于下接头的位置。类似地,调节器224也安装到上接头226,在示例性形式中,上接头226可以包括旋转接头234。
[0089]
在示例性形式中,旋转接头234可以包括螺栓或螺钉240(可选地弹簧加载的),该螺栓或螺钉240可以被拧紧以选择性地阻止调节器224相对于切割引导件190的旋转。替代地,上接头226可以是允许调节器224相对于切割引导件190选择性地重新定位的任何接头或运动激活装置(马达驱动的),使得当需要时,调节器相对于切割引导件的重新定位被基本上抑制。除了旋转接头234之外,上接头226还可以包括球形接头236。以这种方式,当球形接头未被锁定时,切割引导件190可以相对于调节器224(和pam 130)相对于平行于旋转接头234的旋转轴线延伸的轴线成角度地重新定位高达45度。如将在下文更详细地讨论的,球形接头236的可调节性可用于调节远侧股骨切口的内翻或外翻性质。
[0090]
转到图4,可以代替图3的刚性参考170或除了图3的刚性参考170之外使用的替代示例性刚性参考270包括参考壳体272,该参考壳体272包括惯性测量单元,该惯性测量单元安装到紧固到股骨160的一对销276上。该替代的示例性刚性参考270通过将参考壳体272(与imu 274一起)与位于也容纳电源(例如,电池)的壳体278内的参考发射器通信地耦合(无论是有线273还是无线地)来促进对患者骨160的跟踪。在示例性形式中,参考壳体272的相对小的尺寸允许其安装到患者骨160,而不需要附加的切口或更大的切口来接近关节置
换或翻修的外科手术部位。换句话说,该替代的示例性刚性参考270通过不需要将发射器和电源刚性地安装到患者骨而提供了优于另一刚性参考170的尺寸优势(更小)。例如,imu可操作以创建数据并将数据传送到发射器,发射器将数据传递到外科手术导航软件应用104上。imu 274可以包括至少一个三轴加速度计,一个三轴磁力计和一个三轴陀螺仪。以这种方式,imu 274生成指示三个正交轴上的加速度的数据,磁性数据和陀螺仪数据,外科手术导航软件应用104使用这些数据来确定imu的位置和取向的变化。因此,通过使用刚性参考270将imu 274刚性地安装到骨(例如,股骨160),imu的位置和取向的变化可以快速且准确地归因于骨的位置和取向的变化。因此,通过已知imu 274如何根据时间重新定位,外科手术导航软件应用104还能够确定在相同时间段内骨的位置和取向的变化。如下文将讨论的,通过相对于与切割引导件190相关联的第二imu装置182初始化刚性参考270的imu装置274,可以由外科手术导航软件应用104确定切割引导件相对于患者骨的相对位置。
[0091]
再次参考图1,运行外科手术导航软件104的工作站102可操作以处理来自imu 173/274、183的传感器数据,并将该传感器数据转换成与相对于患者解剖结构的切除平面位置相关的信息。此外,外科手术导航软件104可操作以经由一个或多个视觉显示器106向外科医生提供可视化。在示例性形式中,可视化可以包括3d虚拟组织模型114、切割引导件190或切割槽200的3d虚拟模型、投影、文本或传送切割槽相对于患者解剖结构的取向和位置的任何其他形式。作为可视化的一部分传送的信息可以以最少每秒十帧来更新,使得正被显示的信息可以被认为是接近实时的或实时的。
[0092]
切割引导件190的任何或所有部件可以是一次性使用的。替代地,切割引导件190的任何或所有部件可以是可重复使用的并且适于再消毒。在任何情况下,切割引导件190、pam 130和刚性参考170、270的部件中的任一个或全部可以由多种材料制成,诸如但不限于聚合物、金属和复合材料,并且可以使用包括但不限于增材制造、注射成型、机器铣削和铸造的技术制成。切割引导件190、pam 130和刚性参考170、270的各个部件的组装和连接可以通过可用的任何方式来执行,诸如适当的压配合,锁定,利用外部固定装置,诸如固定螺钉,粘合剂,焊接或机械组装领域的技术人员已知的用于将部件彼此固定的其他方法。虽然本文可能已经单独讨论了切割引导件190、pam 130和刚性参考170、270的各种部件,但是应当理解的是,任何或所有部件可以是集成的或可分离的。
[0093]
参考图5,为了提供关于切割槽200的位置和取向的实时反馈,imu 173/274、183可操作以产生指示取向和位置的数据,该数据被传送到在工作站102上运行的外科手术导航软件104。以下是关于当在用于全膝关节置换术(tka)的示例性手术中与用于外科手术设备(例如,切割引导件190、pam 130)的已知尺寸配合时如何由外科手术导航软件104确定切割槽200的取向和位置的讨论。
[0094]
根据本公开的imu 173/274、183可以测量围绕x轴,y轴和z轴的取向,但不能直接测量平移。为了确定imu的平移,可以使用外部传感器或者使用相对于现实世界对象(例如,骨)已知的起始位置和取向来初始化imu。例如,外部传感器可以包括线性定位传感器(例如,线性可变位移变换器,线性运动编码器,超声测距或光学测距)以提供平移信息。
[0095]
在示例性形式中,如下文所述,本公开可以利用初始化位置,其中imu 173/274、183分别刚性安装到切割引导件190和pam 130,使得已知切割引导件相对于pam的相对位置和取向(并且imu 173/274、183的相对位置和取向也是已知的)。作为另一示例,该初始化位
置可以使得切割槽200沿着与pam相同的平面对准。在建立该初始化位置之后,切割引导件190可以相对于pam 130重新定位,以执行经由术前外科手术计划建立的股骨切割。
[0096]
在本公开的上下文中,术前外科手术计划将建立tka的远侧骨切割的深度(例如,位置),以及pam 130在患者骨160上的放置。如图5所示,在已知远侧骨切割的深度(标识为“x”)和从pam 130相对于骨160的放置已知的起始位置b的情况下,需要两条信息以便正确地定位切割引导件190以实现远侧切割:(1)角度α;以及(2)距离ab。距离ab是已知器械尺寸的函数(这是从pam的中心到切割槽200的中心的线性距离),其中距离ab根据本公开是恒定的,并且随着切割引导件190经由下接头222围绕pam 130旋转而不改变。结果,使用三角法,可以从图5的等式计算角度α。并且已知该角度α,外科手术导航软件104使用pam 130的imu 183经由imu 173、274跟踪切割槽200相对于患者骨的角度变化,使得当切割槽以角度α定位时,外科手术导航软件通知外科医生切割槽根据术前外科手术计划定位,使得外科医生可以执行远侧股骨切割。在切割槽200未与角度α对准的情况下,外科手术导航软件向外科医生提供指示切割槽应当如何重新定位以实现角度α的反馈。如下文将讨论的,与切割引导件190相关联的接头226、236可以被重新定位以调整内翻/外翻、屈曲/伸展和其他已知的自由度。
[0097]
根据本公开,已知器械(pam 130、切割引导件190)的尺寸对于在外科手术(诸如tka)期间动态地计算器械的相对位置和取向是重要的。例如,pam 130、切割引导件190和切割槽200中的每一个可以被适当地定尺寸以促进执行期望的外科手术,优选地具有对标准切口或微创切口的最小修改。可以在外科手术之前以许多方式选择每个部件(例如,pam 130、切割引导件190和切割槽200)的适当尺寸。例如,每个部件可以以患者特定的方式制成,其中选择所有尺寸以最佳地匹配患者和外科手术计划。因为患者特定的制造可能不是成本有效的,所以另一选项是基于群体分析来选择维度。矫形器械领域的技术人员将熟悉基于群体分析的尺寸确定。
[0098]
通常,在几个样品(群体)上测量解剖结构的尺寸,使得测量的范围和变化在样品上是已知的。如果需要,群体可以被细分,使得每个群体细分内的测量的范围和变化是已知的。执行该细分的方法包括但不一定限于建立回归模型、无监督或监督聚类、混合物建模、划分或任何其他方法。以这种方式,可以为每个部件选择最佳尺寸或大小的集合。该过程可以使用统计几何模型或机器学习方法以自动或半自动的方式执行。
[0099]
使用包括柱组件的每个器械的组成部件的已知尺寸,可以使用机器人操纵器和正向运动学领域的技术人员熟悉的方法来确定外科手术器械的可允许工作体积,特别是可到达的切割方向和位置。例如,给定接头类型
--
旋转、球形或任何其他
--
以及如上所述的机械连接件220的每个连杆的已知尺寸,每个接头的denavit-hartenberg(dh)参数是已知的。根据该信息,dh惯例可以用于在第一旋转接头222和切割槽200之间建立适当的一系列变换。通过在每个接头的变量的可允许范围的全部或大部分处计算端部位置和取向,可以针对外科手术中的每个步骤计算切割槽200的工作体积。该惯例可以用于验证所选择的部件尺寸足以实现期望的外科手术计划。图6-图15示出了系统100的组成部件的一些可能的临界尺寸以及群体变化的示例,其用作尺寸选择的输入。
[0100]
参考图6,pam 130除了患者特定特征外还可以包括临界尺寸,包括(中间外侧)ml宽度和(前后)ap高度。在该示例性公开中,pam 130设置切割引导件190的旋转中心,其中可
以选择pam 130的位置以优化系统100的精度和性能。应当仔细地选择ap和ml尺寸,使得将pam 130耦合到切割引导件190的机械连接件220清除股骨的预期切口和内侧(medial aspect)两者,而不会导致切割引导件一旦组装就与骨或软组织碰撞。类似地,应当选择切割引导件190的长度以及经由机械连接件220的锁定位置的位置,以便于每个手术步骤
--
允许切割槽200被适当地定位和操纵而不受冲击。
[0101]
参考图7,用于建立和优化pam 130在患者骨160上的匹配位点的示例性方法包括利用受过训练的人类专家,作为术前计划的一部分,或者除了或代替人类专家,使用人工智能(ai)。ai使用从群体统计(即,统计图集)提取的测量或表面几何形状来学习关于准确度和群体形态的设计约束,并且输出针对准确度优化的pam 130的位置以实现期望的计划。
[0102]
转到图8和图9,根据本公开的示例性切割引导件190可以包括切割槽200,其尺寸可以部分地基于外科医生在tka期间预期使用的预期锯片来构造,以便适当地捕获锯片。在许多tka手术中,外科医生将利用摆动尖端锯从远侧股骨移除骨以使股骨准备好接受矫形植入物。用于摆动尖端锯的示例性锯片可以具有大约1.19毫米的厚度,但是可以不时地使用其他厚度。以这种方式,切割槽200的宽度(在ap方向上)可以略大于预期锯片的厚度。切割槽200宽度与锯片之间的公差越精确,导致锯片的骨切割与槽共面的精度越高。除了建立切割槽200的ap宽度之外,应当选择切割槽的ml长度,以允许如术前外科手术计划所指示的切除整个远侧表面、后表面和前表面。
[0103]
参考图10,替代的示例性切割引导件290包括引导件主体292,该引导件主体292用至少两个引导销孔294代替切割槽200。在该替代的示例性切割引导件290中,引导销孔294与单独的切割块300(参见图30)的对应孔匹配,使得引导件290可以用于定位两个或更多个外科手术销210,所述两个或更多个外科手术销210然后用于对准切割块。换句话说,外科医生利用切割引导件290来已知钻孔的位置,并且相应地将外科手术销210紧固到患者的骨。作为另一示例,钻入患者骨中的销孔(或外科手术销本身的位置)可以彼此具有与常规远侧切割块300上的销孔相同的距离。在钻出销孔之后,引导件290可以用单独的切割块代替,该切割块使用外科手术销与患者的骨对准。作为示例,示例性常规切割块可从smith&nephew,zimmer,depuy和stryker获得。
[0104]
参见图11,示例性切割引导件190可以包括选择性地耦合到引导件主体192的刀片支撑附件195,以便为延伸穿过切割槽200的外科手术刀片提供稳定性。
[0105]
图12-图16反映了使用术前外科手术计划软件104对患者骨模型114(在这种情况下为股骨)进行自动界标的示例性过程。如图12所示,软件104可操作以使用统计图集自动界标来计算机械轴线的位置、远侧切除点,这两者都用于计算建议的优选股骨远侧切除平面156。图13描绘了跨越统计图集的给定群体的切除的中间外侧宽度的提取和测量。提取和测量的中间外侧宽度用于创建远侧切割槽200尺寸的设计包络(描绘了来自统计图集群体的代表,其中蓝色反映最大尺寸,绿色描绘中等尺寸,并且红色反映最小尺寸)。图14示出了对统计图集的代表进行的远侧股骨切除术切割。图15反映了切除的中间-外侧尺寸与远侧切除平面156深度的变化之间的关系。例如,黄色反映了将切除平面156定位成比计划的或建议的切除平面位置更远4毫米,而红色反映了将切除平面定位在计划的或建议的位置处,并且最后,浅蓝色反映了将切除平面定位成比计划的或建议的切除平面位置更近4毫米。最后,图16描绘了跨越统计图集群体的中间外侧宽度,以建立捕获给定群体的大部分或全部
的切割槽200尺寸。
[0106]
转到图17-图20,作为外科手术导航的早期步骤,进行配准以将图像引导外科手术系统100与患者骨160对准。作为建立配准的一部分,pam 130可以与患者骨160对准,使得pam的(一个或多个)患者特定表面仅在单个取向和位置上匹配并精确地接触患者解剖结构。在将pam 130定位在患者骨160上使得pam占据与组织(例如,骨)的形貌精确匹配的单个取向和位置时,可以使用一个或多个外科手术销210或螺钉将pam安装到患者组织(例如,骨),所述一个或多个外科手术销210或螺钉被接收在可以钻到患者组织中的孔内。以这种方式,pam 130刚性地固定到患者组织,使得当组织被重新定位时,pam也被重新定位。除了将pam 130安装到患者组织之外,刚性参考170也安装到患者组织。如本文所讨论的,切割引导件190经由机械连接件可重新定位地安装到pam 130。
[0107]
如图17和图18所示,在示例性形式中,使用机械连接件220将切割引导件190以已知的配准位置和取向安装到pam 130,机械连接件220又是通过pam相对于患者骨160(例如股骨)的已知位置和取向。更具体地,如图17所示,下接头222将pam 130耦合到调节器224,并且上接头226将切割引导件190耦合到调节器。特别地,切割引导件190被取向成使得切割槽200的主纵向轴线平行于切割引导件的主纵向轴线,使得轴线共面。此外,使用接头222、226沿着调节器224在切割引导件190和pam 130之间设定对应于已知的预定间距的间距。以这种方式,以实线表示的切割引导件190的位置是相对于pam 130的预定位置。应当注意的是,通过调节旋转下接头222,切割引导件190可以围绕pam 130旋转,如虚线所示。当切割引导件190经由机械连接件220安装到pam 130并且采用已知的配准位置时(并且当刚性参考170安装到患者组织时),来自imu 173、183的数据由图像引导外科手术系统100记录以建立参考点。更具体地,处理来自imu 173、183的数据以确定切割引导件190相对于患者骨160的位置和取向的变化。以这种方式,使用刚性参考170的imu 173独立地跟踪患者骨骼160的未来运动,而使用跟踪imu 183单独地跟踪切割引导件190的运动。结果,如图18所示,图像引导外科手术系统100显示患者的骨160的虚拟骨模型114以及表示切割槽200的位置和取向的虚线185(其可以是颜色突出的(例如,绿色)),以区分所述切割槽的与建立骨切割平面的位置和取向的术前外科手术计划一致或不一致的位置。
[0108]
转到图19和图20,建立切割引导件190相对于患者骨的配准还可以包括使用上球形接头236相对于机械连接件220重新定位切割引导件。在示例性形式中,上球形接头236允许引导件主体192选择性地允许引导件主体(和切割槽200)相对于调节器224(和pam 130)相对于平行于旋转接头234的旋转轴线延伸的轴线成高达45度的角度成角度地重新定位。以这种方式,球形接头236允许切割槽200的内翻或外翻调节。作为示例,切割引导件190主体192的实线位置表示配准位置,而虚线表示引导件主体192可相对于旋转接头234的旋转轴线占据的角度取向的可能变化。因为imu 183刚性地安装到引导件主体192,所以切割槽200的位置和取向的变化相应地反映在imu 183的位置和取向的变化中,imu 183将其数据发送到图像引导外科手术系统100。图像引导外科手术系统使用来自imu 183的数据以及已知引导件主体192的尺寸和球形接头236相对于其的位置来计算切割槽200的位置和取向。结果,如图20所示,图像引导外科手术系统100显示患者的骨160的虚拟骨模型114以及表示切割槽200的位置和取向(其可以是颜色突出的(例如,白色189))相对于预期切割槽的位置和取向(其可以是颜色突出的(例如,绿色187))的一对虚线187、189,以区分所述切割槽的
与建立骨切割平面的位置和取向的术前外科手术计划一致或不一致的位置和/或取向。在配准后,图像引导外科手术系统100可用于促进作为tka的一部分的股骨远侧端部处的一个或多个骨切割。
[0109]
参考图22,tka外科手术可以包括远侧股骨切除。在如前所述的图像引导外科手术系统100的配准之后,可以使用接头222、226中的一个或两个相对于pam重新定位切割引导件190。作为示例,可以操纵下部旋转接头222,以便允许切割引导件190经由延伸穿过螺栓/螺钉230的旋转轴线围绕pam 130旋转,以为远侧股骨切除做准备。在示例性形式中,图像引导外科手术系统100可操作以处理来自imu 173、183的数据,并且通过计算切割引导件190相对于患者的骨的相对位置和取向来显示患者的骨160的虚拟骨模型114以及切割槽200的相对更新的位置和取向。在下接头222的上下文中,因为仅使用单个旋转接头,所以一个或多个视觉显示器106可以显示“可达”区域,或者可以通过操纵上球形接头来切割的骨的可允许范围。特别地,使用三角法,图像引导外科手术系统100通过取第一接头222与第二接头226之间的已知距离“l
ri_1”并乘以正弦θ来计算远侧至近侧距离“深度
1”,其中角度θ是切割引导件190的配准位置与切割引导件的当前位置之间的角度。使用来自imu 173、183的数据,图像引导外科手术系统100可操作以计算切割引导件的位置,并且相应地计算角度θ。使用所计算的角度θ,图像引导外科手术系统100然后计算“深度
1”并且描绘患者的骨160的虚拟骨模型114以及切割槽200的相对更新的位置和取向。以这种方式,外科医生能够确定切割引导件190是否应当根据术前外科手术计划相对于pam 130进一步旋转,以进行正确的远侧股骨切割。假设达到股骨切口的“深度
1”,外科医生可以将下接头222锁定在适当位置并且专注于重新定位上接头226。
[0110]
转向图23,上接头226可以包括旋转接头234和球形接头236。每个都可以重新定位以调节切割引导件190相对于pam 130的位置。在示例性形式中,切割引导件190可以被允许围绕延伸穿过螺栓/螺钉240的旋转轴线旋转。围绕螺栓/螺钉240的旋转可用于校正(或调整)用于切除的屈曲和伸展角度。特别地,使用三角法,图像引导外科手术系统100通过获取第二接头226与切割引导件主体192的中心之间的已知距离“l
ri _2”并乘以正弦σ来计算远侧到近端距离“深度
2”,其中角度σ是切割引导件190的配准位置与切割引导件相对于上接头226的当前位置之间的角度。使用来自imu 173、183的数据,图像引导外科手术系统100可操作以计算切割引导件190的位置,并且相应地计算角度σ。使用计算的角度σ,图像引导外科手术系统100然后计算“深度
2”,并描绘患者的骨160的虚拟骨模型114和切割槽200的相对更新的位置和取向。以这种方式,外科医生能够确定是否应当根据术前外科手术计划相对于第二接头226进一步旋转切割引导件190以进行正确的远侧股骨切割。假定股骨切割的“深度
2”被达到,外科医生可以将上旋转接头234锁定在适当位置并且集中于重新定位球形接头236。
[0111]
如图24所示,球形接头236的调节允许切割槽200旋转以适应内翻和外翻角度调节。换句话说,解锁球形接头236允许操纵切割槽200,使得切割的切除深度、内翻取向和屈曲取向相对于术前计划是可接受的。在示例性形式中,切割引导件190可以被允许围绕球形接头236的球体旋转。特别地,使用三角法,图像引导外科手术系统100使用以下方程计算内侧隔室偏移和外侧隔室偏移:
其中:“l
rl_3m”是引导件主体192横跨内侧隔室的长度;“l
rl_3l”是引导件主体192横跨外侧隔室的长度;角度“λ”是配准位置和角度偏移之间的角度。
[0112]
参考图22-图26,假定达到股骨切割的“深度
2”,外科医生可锁定上旋转接头234。因此,为了得到中间深度偏移“深度
3m”,已知长度“l
rl_3m”乘以正弦λ。同样,为了得到外侧深度偏移“深度
3l”,将已知长度“l
rl_3l”乘以正弦λ。为了计算内侧隔室中的实际切除深度,对“深度
1”和“深度
2”以及“深度
3m”求和(见图22-24)。类似地,为了计算在外侧隔室中的实际切除深度,对“深度
1”和“深度
2”以及“深度
3l”求和(见图22-24)。使用来自imu 173、183的数据,图像引导外科手术系统100可操作以计算上述内容。以这种方式,外科医生能够确定是否应当根据术前外科手术计划进一步围绕球形接头236旋转切割引导件190以进行正确的远侧股骨切割。一旦切割导向装置190的位置和取向是可接受的,接头222、226、236就可以被锁定,并且可以进行远侧股骨切除术切割,如图25和图26所示,其中外科医生控制外科手术锯250。
[0113]
参见图27-图30,在完成远侧股骨切除术切割之后,切割引导件190和pam 130可用于便于放置固定装置(例如,外科手术销210),所述固定装置将引导并接合固定位置切割块300。在股骨tka外科手术中,具有五个骨切口,剩余的切口(除了远侧股骨切除之外)是前侧、后侧和两个斜切口。为了便于这四次骨切割,可以使用传统的器械,称为4合1(4 in 1)切割块300。固定到患者的经切除的股骨160的远端的该切割块300包括两个或更多个开口,所述两个或更多个开口被配置成接收从经切割的远侧表面延伸的两个或更多个外科手术销210。以这种方式,外科手术销210可操作以使切割块300相对于远侧股骨对准并且将切割块引导到抵靠经切除的股骨表面的位置。除了被配置成接收外科手术销210的开口之外,切割块300包括四个或更多个切割槽,每个切割槽属于四个所述剩余骨切口中的一个。然而,应当注意,不同的膝植入物可能需要不同的切割位置,甚至需要不同数量的骨切口。然而,本文公开的示例性装置和方法可应用于任何切割引导件(例如,智能或非智能的),无论是通过物理对准引导件放置还是经由计算机反馈或控制放置。
[0114]
如图28和图29所示,为了准备用于使用4合1切割块300的经切除的股骨,图像引导外科手术系统100经由一个或多个视觉显示器106提供指令,用于对切割引导件190进行重新定位,使得引导件主体192基于来自imu 173、183的数据而抵靠经切除的远侧股骨107的暴露表面定位。特别地,引导件主体192定位成使得一个或多个通孔202与经切除的股骨107
的预期位置对准,从而使得外科手术钻头可以延伸穿过孔口并且在股骨内钻出孔。销孔规定了剩余骨切口的内外旋转和前后定位。在孔形成之后,放置两个或更多个外科手术销210,每个孔中一个,可选地使用引导件主体孔口202将外科手术销对准到适当位置,使得外科手术销延伸到经切除的股骨中并且大致垂直于经切除的股骨平面表面向远侧延伸。在将外科手术销210安装到经切除的股骨上之后,可以从手术部位移除切割引导件190和pam 130。
[0115]
转到图30和图31,在外科手术销210在经切除的股骨107上就位的情况下,4合1切割块300相对于远侧经切除的股骨107对准,使得切割块300的两个或更多个开口被配置成接收两个或更多个外科手术销210,从而切割块可以抵靠远侧股骨切除切口的暴露骨表面重新定位。在使用外科手术销210将切割块对准并抵靠被切除的远侧股骨表面的情况下,外科医生可以将切割块300锁定就位。此后,外科医生可以重新定位外科手术刀片穿过块300的相应槽302,以进行前侧、后侧和两个斜切远侧股骨切割。在完成骨切割之后(见图31),块300和外科手术销210可从远侧股骨移除,以备矫形试验物装配。虽然前述示例性外科手术利用4合1切割块300来进行前侧、后侧和两个斜切远侧股骨切割,但是利用切割引导件190、pam 130和引导脚260也在本公开的范围内。
[0116]
参考图32-图37,在完成远侧股骨切除术切割之后,切割引导件190和pam 130可用于便于放置将引导和接合引导脚260的固定装置(例如,外科手术销210)。如本文所讨论的,股骨tka外科手术通常包括五个骨切口,在已经完成远侧股骨切除之后,其中四个保留。为了促进这四次骨切割,可以利用代替pam 130的引导脚260作为锚固件,机械连接件220和切割引导件190安装到该锚固件。
[0117]
如图32所示,在pam 130、机械连接件220和切割引导件190已经被用于定位外科手术销210之后,前述部件可以从外科手术部位移除。在示例性形式中,pam 130被引导脚260代替,所述引导脚连接到机械连接件220,就像pam那样,使得引导脚、机械连接件和切割引导件190安装到彼此。在示例性形式中,引导脚260包括两个或更多个孔口,所述孔口被配置成分别接收从股骨107的切除部分延伸的外科手术销260。引导脚260的孔口被配置成仅在单一取向上接收外科手术销210,使得当引导脚接收外科手术销并且抵靠经切除的股骨107重新定位并固定就位时,图像引导外科手术系统100精确地已知引导脚相对于股骨的位置和取向。
[0118]
在该示例性实施例中,图像引导外科手术系统100被编程有引导脚260的精确尺寸,使得当引导脚处于配准位置时,切割引导件190相对于股骨的位置是已知的。换句话说,切割引导件190使用机械连接件220以已知的配准位置和取向安装到引导脚260,所述机械连接件继而是通过引导脚相对于患者骨160 (例如,股骨)的已知位置和取向。
[0119]
如本文所讨论的,下接头222将引导脚260耦合到调节器224,并且上接头226将切割引导件190耦合到调节器。特别地,切割引导件190取向成使得切割槽200的主纵向轴线平行于切割引导件的主纵向轴线,因此这些轴线是共面的。此外,使用接头222、226沿着调节器224在切割引导件190和引导脚260之间设定对应于已知的预定间距的间距。以这种方式,切割引导件190相对于引导脚260的位置是已知的。当切割引导件190经由机械连接件220安装到引导脚260上并且采取已知的配准位置时(并且当刚性参考170安装到患者组织时),来自imu173、183的数据由图像引导外科手术系统100记录,以建立用于相对于经切除股骨具
有已知位置和取向的切割引导件190的参考点。并且,如下文所述,图像引导外科手术系统100利用该参考点来跟踪并通知用户(例如,外科医生)关于切割引导件的位置和取向,以便于利用切割引导件来执行前侧、后侧和两个斜切远侧股骨切割。
[0120]
参考图34和图35,来自imu 173、183的数据由图像引导外科手术系统100处理,以确定切割引导件190相对于患者骨160的位置和取向的变化。以这种方式,使用刚性参考170的imu 173独立地跟踪患者骨160的运动,而使用跟踪imu 183单独地跟踪切割引导件190的运动。结果,图像引导外科手术系统100显示患者骨160的虚拟骨模型114以及颜色编码(例如,绿色)的虚线310,以确认预期切割线与术前外科手术计划一致。在该示例性顺序中,外科医生可以通过松开和紧固旋转接头222、234和球形接头236来重新定位切割引导件190,以便定位和取向切割槽200,从而根据术前外科手术计划、即如图34中所示的前切进行必要的切割。一个或多个视觉显示器106被实时或接近实时地更新,以描绘与患者的实际骨相对于穿过切割槽200的投影切割线的位置和取向一致的骨模型114。因此,当切割引导件190与术前外科手术计划一致地定位和取向时,外科医生可使用一个或多个视觉显示器106在视觉上确认位置,并且通过使用具有接收在切割槽200内的刀片的外科手术锯250来执行骨切割。通过经由松开和紧固旋转接头222、234和球形接头236来重新定位切割引导件190,重复该过程,以便重新定位和重新取向切割槽200,从而也进行后切割(见图36)、前斜切(见图37)和后斜切(见图38)。在使用切割引导件190进行最后四个(或大约四个)骨切割之后,切割引导件、机械连接件220和引导脚260可从外科手术销210移除并且远离手术部位。同样,可以从远侧的经切除的股骨上移除外科手术销210,以适应矫形试验物测试装配。但是本实施例也可以用于远侧股骨切割之外的骨切割。
[0121]
参考图39和图40,根据本公开,图像引导外科手术系统100也可以用于引导远侧股骨之外的骨切割。作为示例,图像引导外科手术系统100可以被用来执行作为tka手术(翻修或置换)的一部分的胫骨切除。例如,图像引导外科手术系统100可以利用相同的工作站102、软件104、视觉显示器106、机械连接件220和外科手术器械170、190。但是不同的是患者特定的虚拟组织模型114 (其包括近侧胫骨,而不是上述远侧股骨)和pam 130 (股骨的pam与胫骨的pam不同)。
[0122]
在该示例性讨论中,pam 130被配置成具有至少一个表面,该至少一个表面具有与患者的近侧胫骨的负像(negative)相匹配的几何形状(换句话说,pam的表面形状精确地遵循患者的近侧胫骨的表面,包括形状变化)。通过利用仅在单个位置和取向上适配于患者胫骨的pam 130,具有已知几何形状(大小、宽度、长度、高度等)的器械或其他部件可以被附接到pam,以便于在由外科手术导航软件104利用的参考系内定位器械或其他部件的位置和取向。换句话说,因为已知pam 130相对于患者胫骨的精确位置和取向,所以刚性地安装到pam上的任何结构(具有已知尺寸)也将具有相对于患者胫骨的已知位置和取向。以此方式,pam 130操作以将虚拟参考系与真实世界参考系相关联。
[0123]
在本公开的上下文中,虚拟术前外科手术计划可以建立针对tka的近侧胫骨切除术骨切割的位置和取向,以及pam 130在患者胫骨162上的放置。作为该术前外科手术计划的一部分,图像引导外科手术系统100利用配准来将图像引导外科手术系统与患者110对准。作为建立配准的一部分,pam 130与患者对准,使得pam的(一个或多个)患者特定表面仅在单个取向和位置中匹配和精确地接触患者的胫骨。在将pam 130定位在患者胫骨162上使
得pam占据精确匹配胫骨的形貌的单个取向和位置时,pam可以使用一个或多个外科手术销132或螺钉安装到胫骨,所述一个或多个外科手术销或螺钉被接纳在可以钻入胫骨中的孔内。以这种方式,pam 130刚性地固定到胫骨,使得当胫骨被重新定位时,pam也被重新定位。除了将pam 130安装到患者组织之外,还将刚性参考(未示出)安装到胫骨。类似地,如前所述,切割引导件190经由机械连接件220可重新定位地安装到pam 130。
[0124]
在示例性形式中,切割引导件190使用机械连接件220在已知的配准位置和取向中安装到pam 130,该机械连接件又通过pam相对于患者骨(例如胫骨162)为已知的位置和取向。与前面的讨论一致,下接头222将pam 130耦合到调节器224,并且上接头226将切割引导件190耦合到调节器。特别地,切割引导件190可取向成使得切割槽200的主纵向轴线平行于切割引导件的主纵向轴线,因此这些轴线是共面的。此外,使用接头222、226沿着调节器224在切割引导件190和pam 130之间设定对应于已知的预定间距的间距。应当注意的是,通过调节旋转的下接头222,切割引导件190可围绕pam 130旋转。当切割引导件190经由机械连接件220安装到pam 130上并且采取已知的配准位置时(并且当刚性参考170安装到患者组织上时),来自imu 173、183的数据被图像引导外科手术系统100记录以建立参考点。更具体地说,处理来自imu 173、183的数据,以确定切割引导件190相对于患者骨162的位置和取向的变化。以这种方式,使用刚性参考170的imu 173独立地跟踪胫骨162的未来运动,而使用跟踪imu 183独立地跟踪切割引导件190的运动。结果,图像引导外科手术系统100显示胫骨的虚拟骨模型114以及表示切割槽200的位置和取向的视觉参考(其可以是颜色突出的(例如,绿色)),以区分切割槽的与建立骨切割平面的位置和取向的术前外科手术计划一致或不一致的位置。
[0125]
因为imu 183刚性地安装到引导件主体192,所以切割槽200的位置和取向的变化相应地反映在imu 183的位置和取向的变化中,该imu将其数据发送到图像引导外科手术系统100。图像引导外科手术系统使用来自imu 183的数据,以及已知引导件主体192的尺寸,以计算切割槽200的位置和取向。结果,图像引导外科手术系统100可显示患者胫骨162的虚拟骨模型114,以及表示切割槽200 相对于预期切割槽的位置和取向(其可为颜色突出的(例如,绿色))的位置和取向(其可为颜色突出的(例如,白色))的一对虚线,以区分切割槽的与建立胫骨切除术切割的位置和取向的术前外科手术计划一致或不一致的位置和/或取向。在配准之后,图像引导外科手术系统100可以用于促进胫骨切除术切割。
[0126]
再次参考图39和图40,切割引导件190可使用接头222、226中的一个或两个相对于pam 130重新定位。作为示例,可以操纵下旋转接头222,以便允许切割引导件190经由延伸穿过螺栓/螺钉230的旋转轴线而围绕pam 130旋转,从而为远侧股骨切除做准备。在示例性形式中,图像引导外科手术系统100可操作以处理来自imu 173、183的数据,并显示患者的胫骨162的虚拟骨模型114以及通过计算切割引导件190相对于患者胫骨的相对位置和取向而得到的切割槽200的相对更新位置和取向。在下接头222的情况下,因为仅使用单个旋转接头,所以一个或多个视觉显示器106可显示“可到达的”区域,或可通过操纵上球形接头来切割的近侧胫骨的可允许范围。特别地,如本文所述,使用三角法,图像引导外科手术系统100使用来自imu173、183的数据来确定切割槽200的位置。在到达适当位置时,如由视觉显示器106确认的那样,外科医生可利用延伸到切割槽200中的外科手术锯片(未示出)以便移除胫骨的近侧区段。在进行胫骨切除术切割之后,刚性参考170、pam 130、机械连接件220和
切割引导件190可从手术部位移除。在替代方案中,刚性参考170可以被保持为定位矫形试验物或永久植入物的一部分。
[0127]
转到图41,从切割引导件190移除第二惯性测量装置182并将惯性测量装置安装到放置装置400也在本公开的范围内。在这种情况下,第二惯性测量装置182可安装到放置装置400,矫形试验物410 (例如胫骨试验板)或最终矫形植入物安装到该放置装置。应当注意的是,虽然以下示例是关于胫骨试验物410描述的,但是用于任何关节(例如,膝、髋、肩、踝等)的任何矫形试验物或最终植入物可以类似地与放置装置400结合使用。
[0128]
在示例性形式中,放置装置400具有已知的尺寸,并且可以仅在单个取向和位置上接纳第二惯性测量装置182。结果,当第二惯性测量装置182安装到放置装置400时,图像引导外科手术系统100可以自动地实现该安装,或者依靠手动输入来告诉系统第二惯性测量装置现在安装到放置装置。无论哪种方式,图像引导外科手术系统100使用第二惯性测量装置182的配准位置和取向(当其被安装到切割引导件190时)来实时计算imu 183的位置和取向。因为imu 183相对于第二惯性测量装置182的位置和取向是恒定的,并且第二惯性测量装置仅能以单个位置和取向安装到放置装置400,所以通过计算imu的位置和取向,图像引导外科手术系统100可操作以计算放置装置400的位置和取向。
[0129]
在该示例性实施例中,放置装置400可以仅以预定位置和取向被安装到矫形试验物或最终植入物,其中图像引导外科手术系统100包括用于每个矫形试验物或最终植入物的可以在tka手术期间使用的cad文件或类似数据。以这种方式,图像引导外科手术系统100通过已知放置装置的位置和取向,并且已知哪个矫形试验物或植入物被安装到放置装置(无论是自动地还是经由手动输入),计算矫形试验物或植入物相对于患者骨(例如,胫骨)的相对位置。结果,外科医生可以根据术前外科手术计划关于矫形试验物或植入物的位置和取向被引导。通过引导外科医生关于最终植入物和/或矫形试验物的放置和取向,外科医生能够更精确地定位和取向植入物/试验物。如果植入物/试验物看起来没有确认,外科医生可以进行专业判断,关于是否需要进一步的骨切割、是否需要不同大小的植入物/试验物、以及是否需要完全不同的植入物。
[0130]
参考图42,从切割引导件190 (或其安装到的其它外科手术装置)移除第二惯性测量装置182并且将惯性测量装置安装到张紧装置420 (同时保持刚性参考170安装到患者骨)也在本公开的范围内。在该示例性情况下,张紧装置420可以包括无线张紧器或负载测量装置。作为示例,负载测量装置420可以包括多个压阻、电容和/或基于压电的应变传感器。这些传感器可以被配置成传感器阵列,用于映射接头表面上的高应变的位置。在示例性形式中,负载测量装置420可以具有可以是平坦的或表面与接头部件的铰接表面匹配的表面。此外,负载测量装置420可以包括用于数据通信的微型计算机和/或无线发射器。
[0131]
在示例性形式中,在tka的上下文中,负载测量装置420可以在股骨和胫骨切除之后被放置以评估关节的紧密度。作为评估关节的紧密度的一部分,当矫形试验物或最终植入物就位时,可以使关节通过一运动范围。更具体地,当与imu数据组合时,负载测量装置420可以提供关节紧密度信息以及从imu数据计算的屈曲角度,更不用说使用imu数据提供装置的总体位置和取向。
[0132]
在示例性形式中,负载测量装置420具有已知尺寸,并且可以仅在单个取向和位置上接纳第二惯性测量装置182。结果,当第二惯性测量装置182安装到负载测量装置420时,
图像引导外科手术系统100可以自动地实现该安装,或者依靠手动输入来告诉系统第二惯性测量装置现在安装到负载测量装置。无论哪种方式,图像引导外科手术系统100使用第二惯性测量装置182(当其被安装到切割引导件190时)的配准位置和取向来实时计算imu 183的位置和取向。因为imu 183相对于第二惯性测量装置182的位置和取向是恒定的,并且第二惯性测量装置仅能以单个位置和取向安装到负载测量装置420,所以通过计算imu的位置和取向,图像引导外科手术系统100可操作以计算负载测量装置420的位置和取向。
[0133]
在该示例性实施例中,图像引导外科手术系统100通过已知imu 182的位置和取向来计算负载测量装置420相对于患者骨(例如胫骨)的相对位置。结果,外科医生可以从负载测量装置420接收指示关节负载是否与术前外科手术计划一致的反馈。通过指导外科医生关于关节的紧密度,外科医生能够通过专业判断解决关于是否需要进一步的骨切割、是否需要不同大小的植入物/试验物、以及是否需要完全不同的植入物的任何问题。
[0134]
总之,用于实施tka置换或翻修外科手术的示例性公开步骤可以包括但不限于以任何顺序的以下步骤中的一个或多个:(a)将pam 130安装到股骨160;(b)将参考imu 173安装到股骨160;(c)将器械imu 183安装到切割引导件190;(d)相对于彼此配准imu 173、183,其中至少一个imu相对于患者骨骼160处于已知位置;(e)使用imu引导相对于pam 130 (股骨特定的)重新定位切割引导件190 (其可包括重新定位旋转接头222、234和球形接头236),以定位切割槽200,从而引导与术前外科手术计划一致的远侧股骨切除术切割;(f)进行远侧股骨切除术切割;(g)使用imu引导相对于pam 130 (胫骨特定的)重新定位切割引导件190 (其可包括重新定位旋转接头222、234和球形接头236),以定位切割槽200,从而引导与术前外科手术计划一致的近侧胫骨切除术切割;(h)进行近侧胫骨切除术切割;(i)利用被引导的imu负载测量装置执行评估,以确定任何所需的切除术改变和适当的部件旋转;(j)使用imu引导并使用显示器来显示关于销位置、后切除、前切口、内部/外部旋转的用户实时或接近实时的更新,(1)将切割引导件重新定位到4合1销位置,(2)解锁下旋转接头,旋转直到可实现期望的销接近,(3)锁定底部旋转接头,解锁球形接头并重新定位直到可实现期望的销位置,(4)当实现可接受的位置时锁定所有接头,(5)钻出外科手术销孔,(6)使用所钻的孔将外科手术销安装到经切除的股骨;(k)移除pam 130、机械连接件220和切割引导件190;(l)使用所述外科手术销作为引导件将多刀(multicut)切割引导件安装到所述经切除的远侧股骨;(m)使用所述外科手术销作为引导件将引导脚260安装到所述经切除的远侧股骨,其中所述引导脚最终安装到可重新定位的切割引导件190;(n)调整所述远侧股骨上的后切割、后斜切、前斜切和前切割中的每一个的切割槽;(o)在所述远侧股骨上进行后切割、后斜切、前斜切和前切割中的每一个(其可包括使用外科手术锯);(p)将矫形试验物部件定位在经切除的股骨和胫骨上,以检验部件大小和放置位置;(q)将最终的矫形部件放置在经切除的股骨和胫骨上。
[0135]
参考图43,除了最终的矫形植入物(和可选地试验性矫形植入物)之外,提供包括本文所公开的一个或多个部件的工具包500也在本公开的范围内。考虑到矫形外科手术中、特别是在初级膝关节置换术中,需要减少器械和库存,期望工具包500可以“即时”或定制的方式递送,以减少医疗保健设施处所需的货架空间以及植入物制造商的器械/库存成本。根据客户要求,工具包500的每个部件可以无菌或非无菌地递送。
[0136]
作为示例性工具包(kit)500的一部分,该工具包可包括非患者特定套件
(package)510,其包括以下一种或多种:两个或更多个imu装置172、182,刚性参考壳体174,机械连接件220,切割引导件190,引导脚260,放置装置400,和张紧装置420。预期工具包500的前述示例性套件510部件是单次使用的(即,一次性的),但也可以重新消毒和作为多次使用的部件重新使用。以这种方式,工具包500可以包括或不包括非患者特定套件510,特别是在外科医生重复使用来自先前工具包的部件的情况下。除了非患者特定部件之外,工具包500可以包括各种患者特定部件。
[0137]
作为示例,工具包500可以包括患者特定套件520,其包括以下中的一种或多种:远侧股骨pam 130、近侧胫骨pam 130、患者特定矫形植入物和可选的矫形试验物(例如股骨部件、胫骨托、胫骨托插入物等)。预期工具包500的上述示例性套件520部件仅用于单个外科手术(即,一次性的)。
[0138]
作为另外的示例,工具包500可以包括可选的套件530,其包括外科医生或医院可以预期用作外科手术的一部分的部件,无论这些部件是一次性使用的还是可重复使用的。在示例性形式中,可选套件530可以包括以下中的一个或多个:外科手术销、外科手术钻头、静态多刀骨切割引导件(例如,4合1切割块300)、没有导航的可重新配置的多刀骨切割引导件、以及非患者特定矫形植入物和可选的矫形试验物(例如,股骨部件、胫骨托、胫骨托插入物等)。预期工具包500的上述示例性套件530部件是单次使用的(即,一次性的),但也可以重新消毒和作为多次使用的部件重新使用。
[0139]
通过更进一步的示例,工具包500可包括套件510、520、530中的一个或多个,并且当包括患者特定套件520时,可以即时方式制造和递送。此外,作为工具包的一部分,在外科手术之前或外科手术时,外科手术计划可以被准备并可用于外科手术导航软件104,无线地或经由usb或类似的便携式存储器,并且与工具包500的部件一起使用以执行期望的外科手术过程,诸如但不限于tka。
[0140]
根据以上描述,本领域普通技术人员应当清楚,虽然本文描述的方法和设备构成了本发明的示例性实施例,但是本文描述的本发明不限于任何精确的实施例,并且在不背离由权利要求限定的本发明的范围的情况下,可以对这些实施例进行改变。另外,应当理解的是,本发明由权利要求限定,并且不旨在将描述本文阐述的示例性实施例的任何限制或要素并入任何权利要求要素的解释中,除非明确地陈述了这样的限制或要素。同样,应理解的是,不必为了落入任何权利要求的范围内而满足本文公开的本发明的任何或所有确定的优点或目的,因为本发明由权利要求限定,并且因为本发明的固有和/或未预见的优点可能存在,即使它们可能未在本文中明确地讨论。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1