具有导丝检测传感器的组织移除导管的制作方法
具有导丝检测传感器的组织移除导管
1.相关申请的交叉引用
2.本申请要求2018年9月10日提交的美国临时申请序列号62/729,033的优先权,该临时申请全文以引用方式并入本文。
技术领域
3.本公开整体涉及组织移除导管,并且更具体地涉及具有导丝检测传感器的组织移除导管。
技术实现要素:
4.在一个方面,一种用于移除体腔中的组织的组织移除导管通常包括细长主体,该细长主体具有轴线以及沿着该轴线彼此间隔开的近端部分和远端部分。该细长主体的尺寸和形状被设定成容纳在该体腔中。柄部安装到该细长主体的该近端部分并且能够操作以引起该细长主体的旋转。组织移除元件安装在该细长主体的该远端部分上。该组织移除元件被构造成当该细长主体在该体腔内旋转该组织移除元件时移除该组织。内衬容纳在该细长主体内并且在该内衬的近端部分处联接到该柄部。该内衬限定导丝管腔。传感器相对于该内衬布置,并且被构造成产生用于指示该内衬内导丝的存在的信号。
5.在另一方面,一种用于移除体腔中的组织的组织移除导管通常包括细长主体,该细长主体具有轴线以及沿着该轴线彼此间隔开的近端部分和远端部分。该细长主体的尺寸和形状被设定成容纳在该体腔中。组织移除元件安装在该细长主体的该远端部分上。该组织移除元件被构造成当该细长主体在该体腔内旋转该组织移除元件时移除该组织。内衬容纳在该细长主体内。该内衬限定导丝管腔。传感器相对于该内衬布置,并且被构造成产生用于指示该内衬内导丝的存在的信号。
6.在又一方面,一种移除体腔中的组织的方法通常包括在该体腔中的导丝上方推进组织移除导管,以将该导管的远端定位成与该组织相邻并且将该导管的近端部分定位在该体腔之外。该导管包括细长主体、安装在该细长主体的远端部分上的组织移除元件以及设置在该细长主体内的内衬。该内衬限定在该导管的推进期间该导丝设置在其中的导丝管腔。该方法还包括检测该内衬内是否存在该导丝。
背景技术:
7.组织移除导管用于移除体腔中不需要的组织。例如,旋切术导管用于从血管中移除材料以打开血管并改善通过血管的血流。该方法可用于在患者冠状动脉内制备病灶,以有利于经皮冠状动脉成形术(ptca)或具有严重钙化冠状动脉病变的患者体内的支架递送。旋切术导管通常采用旋转元件,该旋转元件用于研磨或以其他方式破碎不需要的组织。
附图说明
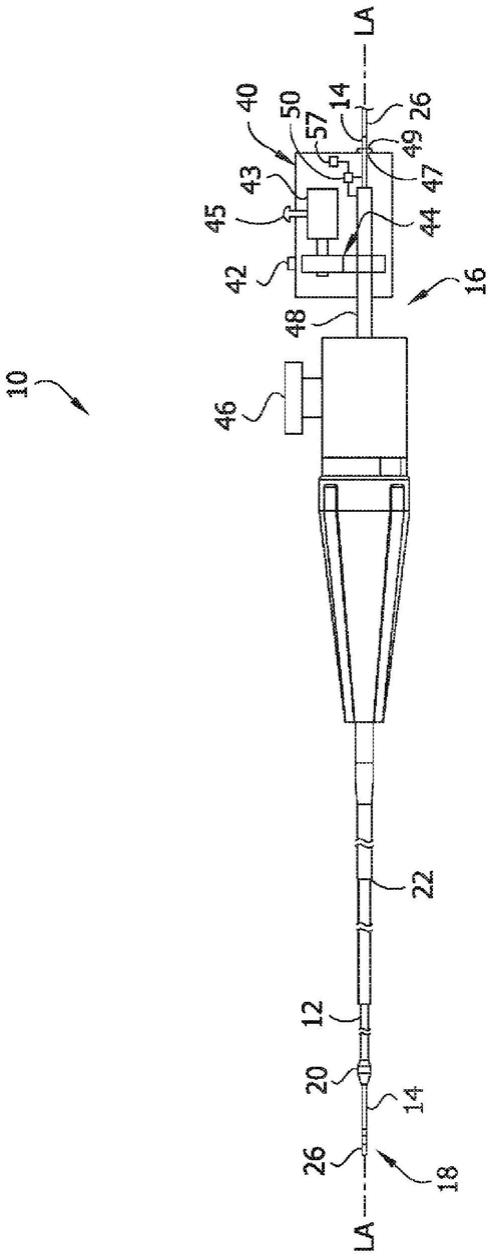
8.图1为本公开的导管的正视图;
9.图1a为导管的导丝检测电路的示意图;
10.图2为导管的远端部分的放大正视图;
11.图3为导管的近端部分的放大正视图;
12.图4为图2中的导管的远端部分的局部放大纵向截面;
13.图5为沿图2中的线5
‑
5截取的横截面;
14.图6为导管的隔离衬片的局部正视图,其中部分被剖开以示出内部细节;
15.图7为导管的远端部分的放大正视图,示出了内衬上的无创末端;
16.图8为导管的远端部分的放大正视图,示出了内衬上的锥形末端;并且
17.图9为导管的组织移除元件的放大纵向截面。
18.在整个附图中,对应的参考字符指示对应的部件。
具体实施方式
19.参见附图,具体地讲参见图1,用于移除体腔中的组织的旋转组织移除导管通常用参考标号10表示。所示导管10为旋切术装置,其适用于从血管壁(例如,冠状动脉壁等)移除(例如,研磨、切割、切除、消融等)闭塞组织(例如,栓塞组织、斑块组织、动脉粥样硬化、血栓溶解组织、狭窄组织、增生组织、赘生组织等)。导管10可用于有利于经皮冠状动脉成形术(ptca)或支架的后续递送。所公开实施方案的特征还可适用于治疗血管的慢性完全闭塞(cto)和其他体腔的狭窄以及其他体腔(诸如输尿管、胆管、呼吸道、胰管、淋巴管等)中的其他增生性和赘生性病症。肿瘤细胞生长通常将由于肿瘤包围并侵入体腔而发生。因此,此类材料的移除可有利于保持体腔的通畅性。
20.导管10的尺寸设定成容纳在受检者的血管中。因此,导管10可具有3、4、5、6、7、8、9、10或12弗伦奇(french)(1、1.3、1.7、2、2.3、2.7、3、3.3或4mm)的最大尺寸,并且可具有20、30、40、60、80、100、120、150、180或210cm的工作长度,具体取决于体腔。虽然其余讨论涉及用于移除血管中的组织的导管,但应当理解,本公开的教导内容也适用于其他类型的组织移除导管,包括但不限于用于从各种体腔中的各种闭塞、狭窄或超塑性材料中穿透和/或移除组织的导管。
21.参见图1和图2,导管10包括围绕细长内衬14设置的细长外层12(广义地,细长主体)。外层12和内衬14沿着导管的纵向轴线la从导管的近端部分16延伸到远端部分18。组织移除元件20设置在外层12的远端上,并且被构造用于旋转以从体腔移除组织,如将在下文更详细地解释。护套22(图1)围绕外层12设置。外层12和内衬14均被构造成能够相对于护套22平移。外层12和内衬14还被构造成能够相对于彼此平移。导管10的尺寸和形状被设定成用于插入受检者的体腔中。护套22将体腔与外层12和内衬14的至少一部分隔离。内衬14限定了导丝管腔24(图5),以用于在其中可滑动地容纳导丝26,使得导管10可通过沿着该导丝行进而推进穿过体腔。该导丝可为标准0.014英寸外径、300cm长度的导丝。在某些实施方案中,内衬14可具有用于在导丝26上方滑动的润滑内表面(例如,润滑表面可由润滑聚合物层或润滑涂层提供)。在所示实施方案中,导丝管腔24从近端部分16延伸穿过导管10的远端部分18,使得导丝26能够沿着导管10的整个工作长度延伸。在一个实施方案中,导管10的总工作长度可介于约135cm(53英寸)和约142cm(56英寸)之间。在使用中,导丝26可延伸超过内衬14的远端约40mm(1.6英寸)。
22.导管10还包括固定在该导管的近端部分16处的柄部40。柄部40支撑致动器42(例如,杠杆、按钮、转盘、开关或其他装置),该致动器被构造用于选择性地致动设置在该柄部中的马达43以驱动外层12的旋转,以及安装在该外层的远端处的组织移除元件20。马达43被构造成能够以大于约80,000rpm的速度旋转外层12和组织移除元件20。马达43通过由柄部40支撑的齿轮组件44和驱动器48联接到外层12。滑动件或推进器45定位在柄部40上并且可操作地联接到外层12以用于该外层相对于该柄部的移动,从而推进和回缩外层和组织移除元件20。柄部40限定了狭槽(未示出),该狭槽限制了滑块45相对于该柄部的移动。因此,该狭槽的长度确定了外层12与柄部40之间的相对移动的量。在一个实施方案中,该狭槽具有约70mm(2.8英寸)的长度。灌注端口46可设置在导管10的近端16处。端口46与护套22和外层12之间的空间连通,以用于递送流体(例如,盐水)以在使用期间冷却旋转外层。近侧端口47允许导丝26和内衬14穿过柄部40的近端。导丝锁49(图1)可设置在柄部40上以将导丝26相对于柄部锁定在适当位置。在一个实施方案中,当致动器42被致动以旋转外层12时,导丝锁49自动接合。
23.应当理解,在其他实施方案中,其他合适的致动器(包括但不限于触摸屏致动器、无线控制致动器、由控制器导向的自动化致动器等)可适于选择性地致动马达。在一些实施方案中,电源可来自容纳在柄部40内的电池(未示出)。该电池可为导丝检测电路提供电流源。在其他实施方案中,该电源可来自外部源。
24.参见图1和图3,外护套22包括管状套管,该管状套管被构造成将受检者的体腔内的动脉组织与旋转外层12隔离并保护受检者的动脉组织。护套22在护套的近端处固定到柄部40并且不旋转。安装在护套22的近端上的毂部52将该护套附接到柄部40。毂部52包括用于接合柄部40以将护套22附接到该柄部的锁定特征部54(例如,螺纹鲁尔锁)。护套22为外层12和内衬14提供了部分封装件以在该护套内移动。护套22的内径的尺寸设定成为外层12提供间隙。护套22与外层12之间的空间允许该外层在该护套内旋转并且在该护套与该外层之间提供用于盐水灌注的区域。护套22的外径的尺寸被设定成与引导导管(未示出)的内径保持间隙,以便将导管10递送到体腔中的期望位置。应变消除件56设置在护套22的近端处,以当护套22在导管10的使用期间弯曲时减轻施加到该护套的近端的张力。在一个实施方案中,护套22具有约0.050英寸(1.27mm)的内径、约0.055英寸(1.4mm)的外径和约1500mm(59英寸)的长度。在不脱离本公开的范围的情况下,护套22可具有其他尺寸。在一个实施方案中,外护套22由聚四氟乙烯(ptfe)制成。另选地,外护套22可包括多层构造。例如,外护套22可包括全氟烷氧(pfa)内层、中间编织线层和pebax外层。
25.参见图1、图2、图4和图5,外层12可包括管状不锈钢线圈,该管状不锈钢线圈被构造成能够将旋转和扭矩从马达43传递到组织移除元件20。将外层12构造成盘绕结构为该外层提供了有利于将导管10递送穿过体腔的柔韧性。另外,当导管10横贯弯曲路径时,线圈构型允许将外层12的旋转和扭矩施加到组织移除元件20。外层12的刚度还影响线圈穿过体腔的容易程度以及线圈将扭矩有效地传递到组织移除元件20的能力。在一个实施方案中,外层12为相对刚性的,使得在导管10移动穿过体腔期间线圈的轴向压缩和延伸最小化。外层12的线圈构型还被构造成当线圈旋转时扩张该外层的内径,使得该外层在导管10的操作期间与内衬14保持间隔开。在一个实施方案中,外层12具有约0.023英寸(0.6mm)的内径和约0.035英寸(0.9mm)的外径。外层12可具有单层构型。例如,该外层可包括具有约30度的捻角
的7丝(即,线材)线圈。另选地,在不脱离本公开的范围的情况下,外层12可由多个层构造。例如,外层12可包括基部线圈层和设置在该基部层上方的夹套(例如,tecothane
tm
)。在一个实施方案中,该外层包括具有约45度的捻角的15丝线圈。tecothane
tm
夹套可设置在该线圈上方。另选地,外层12可包括双线圈层构型,该双线圈层构型还包括两个线圈层上方的附加夹套层。例如,该外层可包括内线圈层和外线圈层,该内线圈层包括具有约45度的捻角的15丝线圈,该外线圈层包括具有约10度的捻角的19丝线圈。还设想了具有其他构型的外层。
26.参见图1、图2和图4至图6,内衬14包括多层管状主体,该多层管状主体被构造成将导丝26与外层12和组织移除元件20隔离。内衬14能够穿过柄部40从柄部近侧的位置延伸到柄部远侧的位置。在一个实施方案中,内衬14联接到柄部40但不固定地附接到柄部40,从而允许该内衬相对于该柄部平移。在该实施方案中,不阻止内衬14的旋转。然而,内衬14与外层12之间的间隙阻止了由该外层旋转引起的该内衬的任何旋转。在该实施方案中,允许内衬14和外层12两者相对于柄部40平移。当向外层12施加力以使该外层在体腔内移动时,允许内衬14和该外层的这种共平移使盘绕外层14的压缩和延伸最小化。在另一个实施方案中,内衬14可固定地附接到柄部40以阻止该内衬和该柄部之间的相对移动。因此,在该实施方案中,内衬14保持固定并且被阻止相对于柄部40平移。另外,阻止了内衬14的所有旋转。在该实施方案中,外层12在固定内衬14上方平移。
27.内衬14具有尺寸被设定成穿过导丝26的内径。内衬14通过将导丝与可旋转外层12隔离来保护该导丝免受该外层的旋转的损坏。内衬14还延伸超过组织移除元件20以保护导丝26免受旋转组织移除元件的影响。因此,内衬14被构造成阻止导丝26与导管10的旋转部件之间的任何接触。因此,内衬14消除了任何金属与金属的接合。外层12和组织移除元件20与导丝26的这种隔离还确保该外层和该组织移除元件的旋转不被传递或传输到该导丝。因此,标准导丝26可与导管10一起使用,因为该导丝不必被构造成承受旋转部件的扭转效应。另外,通过延伸穿过组织移除元件20并超过组织移除元件的远端,内衬14通过提供用于该组织移除元件围绕该内衬旋转的定心轴线来稳定该组织移除元件。
28.在所示实施方案中,内衬14包括ptfe内层60、由不锈钢构成的中间编织层62和聚酰亚胺外层64。ptfe内层60为内衬14提供了润滑内部,该润滑内部有助于导丝26穿过内衬。编织不锈钢中间层62为内衬14提供刚度和强度,使得该内衬可承受由外层12施加在该内衬上的扭力。在一个实施方案中,中间层62由304不锈钢形成。聚酰亚胺外层64提供了耐磨性并且具有减少内衬14与外层12之间的摩擦的润滑性。另外,可将润滑膜诸如硅氧烷添加到内衬14以减小该内衬与外层12之间的摩擦。在一个实施方案中,内衬14具有约0.016英寸(0.4mm)的内径id、约0.019英寸(0.5mm)的外径od和约59英寸(1500mm)的长度。内衬14的内径id为标准0.014英寸导丝26提供了间隙。内衬14的外径od为外层12和组织移除元件20提供了间隙。在内衬14与外层12之间具有空间减少了这两个部件之间的摩擦,并且允许在部件之间进行盐水灌注。
29.在所示实施方案中,标记带66设置在内衬14的远端的外表面上。标记带66将内衬14的末端构造成荧光镜透视可见的,这允许医师在医疗规程期间验证衬件的位置。在该实施方案中,内衬14的远端可被激光切割以提供薄型末端。在一个实施方案中,标记带66包括铂铱条。
30.还设想内衬14的远端可具有其他构造而不脱离本公开的范围。例如,无创末端68
可附接到内衬14的远端(图7)。无创末端68提供了柔软的薄型远端,以有利于内衬14穿过体腔递送而不造成创伤。无创末端68的最大外径可为约0.02英寸(0.6mm)。还设想了其他尺寸的无创末端。在另一个实施方案中,锥形末端70可附接到内衬14的远端(图8)。锥形末端70可由被构造成保护内衬14的远端的材料层形成。
31.参见图1和图1a,控制器50可设置在柄部40中。控制器50可被编程为检测指示导丝26相对于内衬14的位置的信号。例如,控制器50可检测指示内衬14的远端部分处通常是否存在导丝26的信号。控制器50可被构造成当在内衬14的远端部分处未检测到导丝时产生警告信号(例如,可听见的声音、视觉指示等)和/或阻止或停止外层12的旋转。另选地,如果在内衬14的远端部分处检测到导丝26,则控制器50可以继续或开始的形式允许外层12的旋转。该导丝检测可通过将一个或多个传感器51定位在内衬14的远端部分处来实现。控制器50与传感器51电连通,使得传感器可向控制器发送指示导丝26的存在的信号。
32.理想的是,内衬14围绕导丝26的一部分设置,使得该导丝从该内衬向远侧延伸。这确保了导管10的整个长度由导丝26支撑,使得该导管可被适当且安全地引导穿过身体。另外,在导丝26延伸穿过内衬14的远端的情况下,组织移除元件20将由导丝适当地支撑以用于旋转。在这种情况下,如果导丝26被正确地定位,则一个或多个传感器51将检测到该导丝在内衬14的远端部分处的存在。然而,如果内衬14或导丝26已相对于彼此移动使得该内衬的远端部分延伸超过该导丝的远端,则该导丝的任何部分都不会位于该内衬的远端部分处,并且传感器51将不会检测到导丝的存在。由于控制器50与一个或多个传感器51电连通并且可从这些传感器接收信号,因此如果未检测到导丝,则控制器50可向警告部件57发信号并且/或者阻止或停止外层12的旋转。
33.参见图1和图1a,传感器51通常位于内衬14的远端部分处,并且适当地附接到内衬。在一个实施方案中,传感器51附接到内衬14的暴露表面。在另一个实施方案中,传感器51至少部分地嵌入在内衬中。传感器51可为被构造成检测导丝26的存在的任何类型的传感器。例如,传感器51可为光学传感器、磁传感器、压力传感器或用于检测导丝26的存在的任何其他类型的传感器。在传感器51为光学传感器的实施方案中,第一传感器(发射器)51可朝向第二传感器(检测器)51发射光束,以用于检测从第一传感器发射的光。在该实施方案中,控制器50将来自检测器51的信号缺失解释为导丝26存在的指示。这将是导丝26阻挡从发射器51发射的光到达检测器51的结果。相反,如果在检测器51处检测到信号,则控制器将该状况解释为导丝26不存在的指示。另选地,控制器50可将来自检测器51的信号缺失解释为导丝26不存在的指示,并且将信号的存在解释为导丝存在的指示。例如,导丝26可将来自发射器的发射光引导至检测器,使得从检测器接收的信号指示存在导丝。
34.如果一个或多个传感器51为磁性传感器,则这些传感器可位于内衬14上的标记带66处。磁性传感器51检测传感器周围的磁场,并且使用该信息作为导丝26存在的指示。因为导丝26是金属的,所以当该导丝存在于内衬14的远端部分处时,该导丝将影响传感器51周围的磁场。然而,如果导丝26不存在于内衬14的远端部分处,则传感器51周围的磁场将不受导丝的影响。控制器50将来自传感器51的受影响磁场信号解释为导丝26存在于内衬14的远端部分处的指示。
35.在一个或多个传感器51为压力传感器的实施方案中,这些传感器被定位成检测由来自导丝26的接触引起的压力变化。当导丝26在内衬14内移动时,通常该导丝至少部分地
接触该内衬的内壁。通过将压力传感器51定位在内衬14的远端部分处,可检测到导丝26与该内衬的接合。因此,控制器50将来自传感器51的正压信号解释为导丝26存在于内衬14的远端部分处的指示,并且将正压信号缺失解释为导丝不存在于该内衬的远端部分处的指示。
36.附加地或另选地,一个或多个传感器51可位于组织移除元件20中。在该实施方案中,传感器51可为磁传感器。然而,在不脱离本公开的范围的情况下,这些传感器可以是其他类型的传感器。
37.一个或多个传感器51可通过任何合适的方式电连接到控制器50。在一个实施方案中,传感器51在内衬14的远端部分处电连接到该内衬的中间编织层62,并且控制器50在该内衬的近端部分处电连接到中间编织层62。中间编织层62的金属构型在传感器51与控制器50之间传导电信号。另选地,可在内衬14中设置第四层(未示出)以用于在传感器51与控制器50之间传导电信号。在一个实施方案中,该第四层包括被构造成传输电信号的电油墨微传感器。传感器51将在第四层的远端部分处电连接到该第四层,并且控制器50将电连接到该第四层的近端部分。油墨微传感器也可结合到内衬14的其他层中,以用于将一个或多个传感器51电连接到控制器50。在传感器51位于组织移除元件20中的实施方案中,这些传感器可通过外层12电连接到控制器。外层12和驱动器48的金属构型被构造成在传感器51与控制器50之间传导电信号。另选地,附加层(未示出)可用于导管10中以用于将一个或多个传感器51电连接到控制器50。
38.参见图1、图2和图9,组织移除元件20沿着纵向轴线la从与外层12的远端部分相邻的近端延伸到相对的远端。组织移除元件20可操作地连接到马达43,以由该马达旋转。当导管10插入体腔中并且马达43旋转组织移除元件20时,该组织移除元件被构造成移除体腔中的闭塞组织以将组织与体腔的壁分离。在一个或多个实施方案中,可使用任何合适的组织移除元件,以用于在旋转时移除体腔中的组织。在一个实施方案中,组织移除元件20包括研磨毛刺,该研磨毛刺被构造成当马达43旋转该研磨毛刺时研磨体腔中的组织。研磨毛刺20可具有例如通过金刚石粗粒涂布、表面蚀刻等形成的研磨外表面。在一个实施方案中,组织移除元件包括不锈钢球体,该不锈钢球体具有包括5μm的暴露金刚石晶体的外表面。组织移除元件20也可以是射线不可透的,以允许组织移除元件在荧光镜透视检查下可见。在其他实施方案中,组织移除元件可包括具有平滑或锯齿状切割边缘的一个或多个切割元件、浸渍器、血栓切除术线等。
39.腔72纵向延伸穿过组织移除元件20,使得组织移除元件在其近端和远端处限定开口。腔72容纳外层12的一部分以用于将组织移除元件20安装到该外层。腔72包括从组织移除元件20的近端延伸的第一直径部分74、从第一直径部分朝向该组织移除元件的远侧端部延伸的锥形直径部分76以及从该锥形直径部分延伸到该组织移除元件的远端的第二直径部分78。第一直径部分74和第二直径部分78的直径沿着它们的长度为恒定的。在所示实施方案中,第一直径部分74的直径d1大于第二直径部分78的直径d2。在一个实施方案中,第一直径部分74的直径d1为约0.035英寸(0.9mm),并且第二直径部分78的直径d2为约0.022英寸(0.56mm)。锥形直径部分76提供了第一直径部分74与第二直径部分78之间的过渡。外层12被容纳在第一直径部分74中,并且该外层的远端邻接锥形直径部分76。组织移除元件20可通过任何合适的方式固定地附接到外层12的远端。在一个实施方案中,粘合剂将组织移
除元件20粘结到外层12。内衬14延伸穿过组织移除元件20的外层12和第二直径部分78。第二直径部分78的尺寸被设定成以小间隙穿过内衬14。内径d2在组织移除元件20与内衬14之间提供间隙,以减小部件之间的摩擦并且允许用于盐水灌注的空间。因此,组织移除元件20被成形和布置成围绕外层12和内衬14的至少一部分延伸,并且因此提供了用于研磨导管10的远端部分处的组织的相对紧凑的组件。
40.组织移除元件20的外表面包括近侧段80、中间段82和远侧段84。近侧段80的直径从组织移除元件20的近端到中间段82增大。中间段具有恒定的直径并且从近侧段80延伸到远侧段84。远侧段84的直径从组织移除元件20的中间段82到远端逐渐变细。锥形远侧段84为组织移除元件20提供了大致楔形构型,以用于楔入分开狭窄的组织通道,同时通过使用组织移除元件的研磨作用移除组织,从而打开通道。组织移除元件20的远端也是圆形的,从而为该组织移除元件提供钝的远端。
41.参见图1和图2,为了移除受检者的体腔中的组织,医师将导丝26插入该受检者的体腔中,到达待移除的组织远侧的位置。随后,该医师将导丝26的近端部分插入穿过内衬14的导丝管腔24并穿过柄部40,使得该导丝延伸穿过该柄部中的近侧端口47。内衬14也可延伸穿过柄部40并延伸出近侧端口47。在导管10装载到导丝26上的情况下,该医师沿着该导丝推进该导管,直到组织移除元件20定位在组织近侧并与该组织相邻。当组织移除元件20定位在组织近侧并与该组织相邻时,该医师使用致动器42致动马达43以使外层12和安装在该外层上的组织移除元件旋转。组织移除元件20在其旋转时研磨(或以其他方式移除)体腔中的组织。当组织移除元件20旋转时,该医师可选择性地沿着导丝26朝远侧移动外层12和内衬14,以研磨组织并且例如增加穿过体腔的通道的尺寸。该医师还可沿着导丝26朝近侧移动外层12和内衬14,并且可沿着远侧方向和近侧方向重复地移动部件,以获得组织移除元件20跨组织的前后运动。如果导丝26在任一点远离内衬14的远端部分定位,则导丝检测电路可自动停用马达43以停止或终止外层12和组织移除元件20的旋转。将导丝26重新定位在内衬14的远端部分中可自动重新激活马达43以引起外层12和组织移除元件20的旋转重新启动。在研磨过程中,内衬14将导丝26与旋转外层12和组织移除元件20隔离,以保护导丝不被旋转部件损坏。因此,内衬14被构造成承受旋转外层12和组织移除元件20的扭转和摩擦效应,而不将那些效应传递到导丝26。当医师完成使用导管10时,可通过沿着导丝26朝近侧滑动该导管来将该导管从体腔中抽出并从该导丝上卸下。用于研磨过程的导丝26可保留在体腔中以用于后续规程。
42.当介绍本发明的要素或其一个或多个实施方案时,冠词“一个”、“一种”、“该”和“所述”旨在表示存在一个或多个要素。术语“包含”、“包括”和“具有”旨在表示包容性并且表示除所列要素外还可以有附加要素。
43.由于在不脱离本发明范围的情况下可对上述装置、系统和方法进行各种改变,因此旨在将包含在上述说明中并示于附图中的所有内容理解为例证性的而非限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1