基于深度学习的动态叶片引导件的预测性维护的制作方法
1.本文献总体上涉及放射疗法治疗系统的故障检测和诊断(fdd),并且更特别地,涉及检测和诊断与放射治疗机器中的动态叶片引导件(dlg)相关联的故障的系统和方法。
背景技术:
2.放射疗法(或“放射治疗”)可以用于治疗哺乳动物(例如人和动物)组织中的癌症或其他疾病。提供一种这样的放射治疗技术,该放射治疗技术使用线性加速器(也被称为“linac”),由此通过高能粒子(例如电子、质子、离子、高能光子等)辐射肿瘤。必须精确地控制放射束的布置和剂量以确保肿瘤接收到规定的辐射,并且束的布置应当如此以使对经常被称为处于危险中的器官(oar)的周围健康组织的损害最小化。与药物的处方类似,医师对肿瘤和周围器官开出预定量的辐射剂量。一般来说,以准直束形式的电离辐射从外部辐射源指向患者。
3.可以使用指定的或可选择的束能量诸如用于递送诊断能级范围或治疗能级范围。放射束的调制可以由一个或更多个衰减器或准直器(例如多叶准直器(mlc))提供。可以通过准直来调整放射束的强度和形状,以通过使投射的束与靶组织的轮廓一致来避免损害与靶组织相邻的健康组织(例如oar)。
4.诸如linac系统的放射治疗系统可以包括许多部件。一个或更多个部件的故障或失灵可能导致操作错误、意外故障,甚至系统损坏。在某些情况下,这样的部件故障或失灵可能会影响治疗效果或患者安全。设备和部件的预防性检查和维护可能有助于减少或消除设备故障和无意中断,并计划定期活动。替选地,预测性维护——其包括周期性的或连续的监视和评估服务中设备的健康状况和操作状态——可以用于预测未来部件故障或失灵的可能性。部件故障或失灵的准确预测、检测和诊断可以降低与放射治疗系统的维护和服务相关联的成本。
技术实现要素:
5.mr-linac是将linac放射治疗与诊断级磁共振成像(mri)组合的放射治疗系统。mr-linac可以使实现解剖结构的室内mri和生理治疗适应性和反应监视,并且具有利用实时可视化和靶跟踪来降低治疗余裕的潜力。可以精确定位肿瘤和周围组织、跟踪其移动并且响应于在治疗时的肿瘤位置的变化、形状的变化、生物学的变化以及与关键器官的空间关系的变化来实时地调整治疗。
6.mr-linac系统可以包括多叶准直器(mlc),多叶准直器用于将放射治疗束的强度成形、引导或调制到患者内的指定靶部位。mlc由称为叶片的准直元件组成,这些准直元件可以独立地移动进出放射治疗束的路径以使其成形并改变其强度。适形(conformal)放射治疗和调强适形放射治疗(imrt)可以使用mlc递送。例如,在适形放射治疗中,mlc允许束的适形成形以匹配靶肿瘤的边界。对于强度调制治疗,mlc的叶片可以在场间移动以创建imrt分布。
7.mlc的准直元件可以在操作期间以高速移动。例如,agility
tm mlc(瑞典的医科达有限公司)具有160个交叉(interdigitating)叶片,其中等中心处宽度为5mm。这些叶片以80个叶片的两组布置,其中每组叶片包含在随mlc叶片移动的动态叶片引导件(dlg)内。mlc叶片和dlg可以被数字地控制成提供准确的叶片定位。单个mlc叶片的最大速度可以高达每秒35mm(mm/s),并且dlg可以以高达30mm/s的速度移动。因此,当dlg和mlc两者在同一方向上移动时,mlc叶片可以以高达65mm/s的速度移动。
8.mlc叶片和dlg在放射治疗机器的正常使用期间可能会出现故障或失灵。例如,故障或失灵的dlg可能与一个或更多个子部件(例如制动器、电路板、驱动电机、线性滑轨或dlg的耦接)的故障相关联。正确且及时地预测或检测dlg故障,并且准确诊断所述故障的根本原因(例如,将检测到的故障分类为一种或更多种故障类型,例如制动器故障、电路板故障或驱动电机故障)可以是放射治疗系统的预测性维护的重要部分。
9.常规的预测性维护方法在放射疗法治疗系统的机器故障检测和诊断(fdd),例如linac系统中dlg或mlc的fdd的背景下面临一些挑战。例如,许多常规的预测性维护基于复杂的物理模型。这样的模型通常涉及复杂的数学公式和大量的机器特性的参数(例如摩擦系数、振动速度、压力、温度、电流和电压属性)。fdd过程包括将机器或部件数据拟合至物理模型。然而,要建立复杂的物理模型通常需要人类设计师的大量领域知识、技能和专业知识(例如物理学的、医学的和工程学的)。这可能是耗时的,并且可能会增加设计复杂性和总体开发成本。例如,建立物理模型所需的特征提取和特征工程(例如特征选择、特征降维和特征优化)可能是耗时且资源密集的任务。另外,物理模型通常基于关于放射治疗系统中的部件的正常或异常操作特性考虑的一些假设而构造。然而,部件的操作特性可能从一个模型到另一模型不同,也可能从一个制造商到另一制造商不同。因此,在这些假设下开发的物理模型可能不太适于不同的机器或系统。当某些假设不保持时,fdd性能可能会损害。本发明人已经认识到对诸如各种类型的机器故障的自学习以改进放射治疗系统的预测性维护的先进技术的未满足需要。
10.本文献描述了一种基于深度学习的预测性维护模型,并且使用这样的模型来检测和诊断与linac系统的一部分(例如dlg)相关联的故障。示例性预测性维护系统包括处理器,该处理器被配置成:接收指示靶放射治疗机器中的dlg的配置和操作的机器数据;将经训练的深度学习模型应用于接收到的机器数据;以及检测和诊断dlg故障。预测性维护系统可以使用从接收到的一个或更多个正常dlg和一个或更多个故障dlg的机器数据生成的多个数据序列来训练深度学习模型。靶放射治疗机器中的dlg故障的诊断包括将dlg故障分类为与dlg驱动系统的各种部件相关联的一种或更多种故障类型。
11.在该文献中,始终使用诸如“故障检测”、“故障诊断”以及“故障检测和诊断(fdd)”的术语。“故障检测”包括检测成熟的故障和/或即将发生的故障。成熟的故障可以是已经导致放射治疗系统的至少一部分的可检测故障或故障操作的故障。即将发生的故障可以是从做出预测的时刻起起预计在不久的将来(例如根据预测算法)发生的故障。因此,如在本文献中使用的“故障检测”可以指检测成熟的故障和/或预测即将发生的故障。“故障诊断”可以指识别故障的根本原因、将检测到的故障(成熟的故障或即将发生的故障)分类为多种故障类型中的一个、例如基于dlg度量趋势将检测到的故障分类为多个故障严重性级别中的一个以及/或者生成故障分析的过程。
12.示例1是一种用于检测和诊断放射治疗机器中的故障的计算机实现的方法。该方法包括以下步骤:接收指示靶放射治疗机器中的部件的配置和操作的机器数据;将经训练的深度学习模型应用于接收到的靶放射治疗机器中的部件的机器数据,经训练的深度学习模型被训练成建立以下两者之间的关系:(1)从相应的放射治疗机器中的正常部件和故障部件收集的机器数据,以及(2)正常部件和故障部件的故障信息,该正常部件和该故障部件与靶放射治疗机器中的部件是相同类型;以及检测和诊断与靶放射治疗机器中的部件相关联的故障。
13.在示例2中,示例1的主题可选地包括以下步骤:接收从正常部件和具有相应的识别故障的故障部件收集的机器数据,该机器数据指示相应的部件的配置和操作;构造训练数据集,该训练数据集包括从接收到的正常部件和故障部件的机器数据生成的多个数据序列;以及使用所构造的训练数据集来训练深度学习模型以建立经训练的深度学习模型。
14.在示例3中,示例2的主题可选地包括:可以包括动态叶片引导件(dlg)的靶放射治疗机器中的部件,可以包括正常dlg的正常部件以及可以包括具有相应的已识别的dlg故障的故障dlg的故障部件。检测和诊断故障的步骤可以包括检测和诊断靶放射治疗机器中的dlg故障。
15.在示例4中,示例3的主题可选地包括训练深度学习模型,所述训练深度学习模型可以包括:将相应的惩罚权重施加于训练数据集中多个数据序列中的一个或更多个;以及使用所构造的训练数据集来训练深度学习模型,所构造的训练数据集包括加权的数据序列。
16.在示例5中,示例3至4中任何一个或更多个的主题可选地包括经训练的深度学习模型,该经训练的深度学习模型可以包括以下各项中的一项或更多项:卷积神经网络(cnn);循环神经网络(rnn);长短期记忆(lstm)网络;深度信念网络(dbn);或迁移学习模块。
17.在示例6中,示例3至5中任何一个或更多个的主题可选地包括生成包括dlg电流测量结果随着时间推移的趋势的多个数据序列,该dlg电流分别来自处于相应的轴的一个或更多个dlg测量。
18.在示例7中,示例6的主题可选地包括dlg电流趋势,该dlg电流趋势可以包括以下各项中的一项或更多项:每日平均电流的趋势;每日变化电流的趋势;每日最大电流的趋势;电流的多日移动平均值的趋势。
19.在示例8中,示例3至7中任何一个或更多个的主题可选地包括生成包括dlg位置度量随着时间推移的趋势的多个数据序列,该dlg位置度量分别针对处于相应的轴的一个或更多个dlg计算。
20.在示例9中,示例8的主题可选地包括dlg位置度量,该dlg位置度量可以包括在特定时间段内发生的dlg偏离位置事件的计数,并且该dlg位置趋势可以包括以下各项中的一项或更多项:偏离位置事件的每日计数的趋势;或者指定天数内偏离位置事件的累积计数的趋势。
21.在示例10中,示例3至9中任何一个或更多个的主题可选地包括生成可以包括由一个或更多个警报事件触发的警报的趋势的多个数据序列,该警报趋势可以包括以下各项中的一项或更多项:警报的每日计数的趋势;或者指定天数内警报的累积计数的趋势。
22.在示例11中,示例3至10中任何一个或更多个的主题可选地包括构造训练数据集,所述构造训练数据集可以包括向多个数据序列中的每个数据序列分配故障类型,并且其中,诊断靶放射治疗机器中的dlg故障包括将dlg故障分类为一种或更多种故障类型,该故障类型包括:dlg制动器故障;dlg驱动电路板故障;dlg驱动电机故障;dlg滑轨故障;或者dlg耦接单元故障。
23.在示例12中,示例3至11中任何一个或更多个的主题可选地包括构造训练数据集,所述构造训练数据集可以包括向多个数据序列中的每个数据序列分配相应的故障严重性级别,并且其中,诊断靶放射治疗机器中的dlg故障包括将dlg故障分类为多个故障严重性级别中的一个。
24.在示例13中,示例3至12中任何一个或更多个的主题可选地包括训练深度学习模型,所述训练深度学习模型可以包括针对多个数据序列中的每个数据序列确定相应的剩余使用寿命(rul)以及建立多个数据序列与相应的确定的rul之间的关系。该方法还可以包括使用经训练的深度学习模型来预测靶放射治疗机器中的dlg的rul。
25.在示例14中,示例3至13中任何一个或更多个的主题可选地包括训练深度学习模型,所述训练深度学习模型可以包括调整一个或更多个模型参数以使代价函数最小化,该代价函数包括基于马修斯相关系数(mcc)的惩罚项。
26.示例15是一种用于检测和诊断被配置成向病人提供放射治疗的放射治疗机器中的故障的系统。该系统包括被配置成进行如下步骤的处理器:接收指示靶放射治疗机器中的部件的配置和操作的机器数据;将经训练的深度学习模型应用于接收到的靶放射治疗机器中的部件的机器数据,经训练的深度学习模型被训练成建立以下两者之间的关系:(1)从相应的放射治疗机器中的正常部件和故障部件收集的机器数据,以及(2)正常部件和故障部件的故障信息,该正常部件和该故障部件与靶放射治疗机器中的部件是相同类型;以及检测和诊断与靶放射治疗机器中的部件相关联的故障。
27.在示例16中,示例15的主题可选地包括处理器,该处理器可以包括被配置成进行如下步骤的训练模块:接收从正常部件和具有相应的识别故障的故障部件收集的机器数据,该机器数据指示相应的部件的配置和操作;构造训练数据集,该训练数据集包括从所接收到的正常部件和故障部件的机器数据生成的多个数据序列;以及通过使用所构造的训练数据集来训练深度学习模型以建立经训练的深度学习模型。
28.在示例17中,示例16的主题可选地包括:可以包括动态叶片引导件(dlg)的靶放射治疗机器中的部件,可以包括正常dlg的正常部件以及可以包括具有相应的已识别的dlg故障的故障dlg的故障部件。该处理器可以被配置成检测和诊断靶放射治疗机器中的dlg故障。
29.在示例18中,示例17的主题可选地包括处理器,该处理器可以被配置成使用多个数据序列中的每个数据序列的故障信息来构造训练数据集,该故障信息包括故障存在或不存在、故障类型或故障严重性级别的标志。
30.在示例19中,示例17至18中任何一个或更多个的主题可选地包括训练模块,该训练模块可以被配置成生成包括以下各项中的一项或更多项的多个数据序列:dlg电流测量结果随着时间推移的趋势;dlg位置度量随着时间推移的趋势,该dlg位置度量包括在特定时间段内发生的dlg偏离位置事件的计数;或者由一个或更多个警报事件触发的警报的计
数的趋势。
31.示例20是一种非暂态机器可读存储介质,该非暂态机器可读存储介质包括以下指令,所述指令当由机器的一个或更多个处理器执行时,使该机器执行包括以下步骤的操作:接收指示靶放射治疗机器中的部件的配置和操作的机器数据;将经训练的深度学习模型应用于接收到的靶放射治疗机器中的部件的机器数据,经训练的深度学习模型被训练成建立以下两者之间的关系:(1)从相应的放射治疗机器中的正常部件和故障部件收集的机器数据,以及(2)正常部件和故障部件的故障信息,该正常部件和该故障部件与靶放射治疗机器中的部件是相同类型;以及检测和诊断与靶放射治疗机器中的部件相关联的故障。
32.在示例21中,示例20的主题可选地包括还包括以下步骤的操作:接收从正常部件和具有识别故障的故障部件收集的机器数据,该机器数据指示相应的部件的配置和操作;构造训练数据集,该训练数据集包括从接收到的正常部件和故障部件的机器数据生成的多个数据序列;以及使用所构造的训练数据集来训练深度学习模型以建立经训练的深度学习模型。
33.在示例22中,示例21的主题可选地包括:可以包括动态叶片引导件(dlg)的靶放射治疗机器中的部件,可以包括正常dlg的正常部件以及可以包括具有相应的已识别的dlg故障的故障dlg的故障部件。检测和诊断故障的选项可以包括检测和诊断靶放射治疗机器中的dlg故障。
34.在示例23中,示例22的主题可选地包括还包括诊断靶放射治疗机器中的dlg故障的操作,所述诊断靶放射治疗机器中的dlg故障包括将dlg故障分类为以下各项中的一项或更多项:dlg制动器故障;dlg驱动电路板故障;dlg驱动电机故障;dlg滑轨故障;或dlg耦接单元故障。
35.本文献中讨论的基于深度学习的预测性维护改进了fdd准确度和维护效率。与基于物理模型的常规fdd相比,本文中讨论的深度学习模型有利地从测量结果的序列中学习不同故障类型的特性,测量结果来自放射治疗系统中的部件(例如linac系统中的dlg)。本文献中讨论的基于深度学习的预测性维护系统、装置和方法也可以应用于枪(gun)、真空装置(vacuum)、磁控管(magnetron)和其他关键lianc部分和特征的相关问题的维护。本文献还讨论了提高深度学习的性能的各种技术,包括基于惩罚权重、不同深度学习模型的融合以及迁移学习的训练数据平衡。所产生的模型可以有效地独立学习不同的故障特征。通过本文中讨论的深度学习模型学习到的特征的数目可以大大地高于常规fdd模型的人工设计的特征提取器可以提供的特征的数目。另外,本文中讨论的深度学习模型利用比平台相关的常规fdd模型更高的通用性可以适于不同的放射治疗机器。
36.常规的fdd模型通常具有流水线架构,其中要分别设计、训练和优化多个中间模块(例如特征提取和故障分类)。这样的模块化的训练和优化需要大量的领域知识和更长的开发时间和更高的开发成本。相对地,本文中讨论的深度学习模型向fdd提供了“端到端”(e2e)解决方案。根据各种实施方式,卷积神经网络(或其他类型的神经网络)可以视为输入测量结果的序列(例如时间系列)dlg参数,并且直接产生作为输出的故障检测和诊断。与流水线架构相比,可以同时训练所有参数和网络结构。随着故障预测和诊断的准确度和效率的改进,不必要的机器维修、测试和可能的关机的数目以及相关联的维护成本可以大大地减少。在某些情况下,由于在故障可能造成严重损害之前提前检测故障,因此可以减少甚至
消除昂贵的机器损坏。
37.上文旨在提供本专利申请的主题的概述。并不旨在提供本发明的排他性或详尽的解释。本技术包括具体实施方式以提供关于本专利申请的进一步信息。
附图说明
38.附图不一定按比例绘制,在附图中,遍及若干视图,相似的附图标记描述基本上相似的部件。具有不同字母后缀的相似附图标记表示基本上相似的部件的不同实例。附图通过示例的方式而非通过限制的方式总体上示出了本文献中讨论的各种实施方式。
39.图1示出了示例性放射治疗系统。
40.图2a示出了可以提供治疗束的示例性放射治疗系统。
41.图2b示出了包括计算机断层扫描(ct)成像系统和放射治疗系统的示例性组合系统。
42.图3示出了包括核磁共振(mr)成像系统和放射治疗系统的示例性组合系统的部分剖视图。
43.图4是示出可以在诸如mr-linac机器的放射治疗系统中使用的示例性准直器的图。
44.图5是示出示例性mlc以及示例性mlc可以在其中使用的环境的一部分的图。
45.图6a至图6c是示出在dlg故障的校正之前、在dlg故障的校正期间和在dlg故障的校正之后从各种mr-linac系统的dlg收集的机器数据的趋势的图。
46.图7a是示出用于训练fdd深度学习模型以及使用经训练的模型来检测和诊断靶放射治疗系统中的dlg故障的示例性过程的框图。
47.图7b是示出可以根据图7a中示出的过程来构造和训练的示例性卷积神经网络(cnn)的框图。
48.图7c是示出可以根据图7a中示出的过程来构造和训练的示例性循环神经网络(rnn),特别是长短期记忆(lstm)网络的框图。
49.图8是示出组合两个模型,也称为模型融合的fdd深度学习模型的示例性架构的图。
50.图9是示出生成训练用于故障检测和诊断的fdd深度学习模型的训练数据的示例的图。
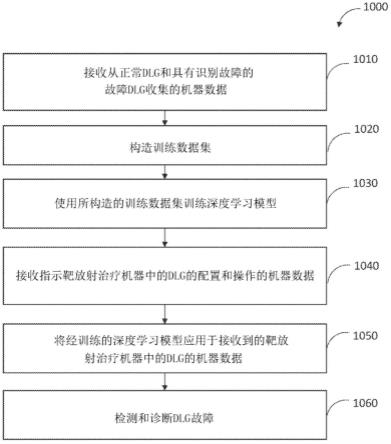
51.图10是示出训练深度学习模型和使用深度学习模型检测和诊断与放射治疗系统中的dlg相关联的故障的示例性方法的流程图。
52.图11示出了可以实现如本文中所讨论的方法中的一种或更多种方法的机器的示例性框图。
具体实施方式
53.在以下详细描述中,参照形成详细描述的一部分的附图,并且通过可以实践本公开内容的图示特定实施方式的方式示出详细描述。在本文中也被称为“示例”的这些实施方式被足够详细地描述以使得本领域技术人员能够实践本公开内容,并且应当理解,在不脱离本公开内容的范围的情况下,可以将实施方式组合或者可以利用其他实施方式并且可以
进行结构、逻辑和电气改变。因此,以下详细描述不是限制性的,并且本公开内容的范围由所附的方面及其等同内容限定。
54.图1示出了用于向患者提供放射治疗的示例性放射治疗系统100。放射治疗系统100包括数据处理装置112。数据处理装置112可以连接至网络120。网络120可以连接至因特网122。网络120可以将数据处理装置112与下述中的一个或更多个连接:数据库124、医院数据库126、肿瘤学信息系统(ois)128、放射治疗装置130、图像获取装置132、显示装置134和用户接口136。数据处理装置112可以被配置成生成要由放射治疗装置130使用的放射疗法治疗计划142。
55.数据处理装置112可以包括存储器装置116、处理器114和通信接口118。存储器装置116可以存储计算机可执行指令,诸如操作系统143、放射疗法治疗计划142(例如原始治疗计划、经调整的治疗计划等)、软件程序144以及要由处理器114执行的任何其他计算机可执行指令。存储器装置116可以附加地存储数据,数据包括医学图像146、患者数据145以及实现放射疗法治疗计划142所需的其他数据。
56.软件程序144可以包括实现人工智能、深度学习和神经网络等算法的放射疗法治疗计划软件。在示例中,软件程序144可以通过产生诸如伪ct图像的合成图像来将一种格式(例如mri)的医学图像转换成另一种格式(例如ct)。例如,软件程序144可以包括图像处理程序,该图像处理程序用以训练用于将医学图像从一种模态中的医学图像146(例如mri图像)转换成不同模态的合成图像(例如伪ct图像)的预测性模型;替选地,经训练的预测性模型可以将ct图像转换成mri图像。在另一示例中,软件程序144可以将患者图像(例如ct图像或mr图像)与该患者的剂量分布(也表示为图像)配准,使得相应的图像体素和剂量体素通过网络适当地关联。在又一示例中,软件程序144可以替代患者图像的功能,诸如签名的距离功能或强调图像信息的一些方面的图像的已处理版本。这样的功能可能强调体素纹理的边缘或差异,或对神经网络学习有用的任何其他结构方面。软件程序144可以替代强调剂量信息的一些方面的剂量分布的功能。这样的功能可能强调围绕靶的陡峭梯度或对神经网络学习有用的任何其他结构方面。
57.在示例中,软件程序144可以针对描绘解剖结构(例如一个或更多个靶和一个或更多个oar)的一组二维(2d)和/或3d ct或mr图像生成投影图像,所述投影图像表示在放射治疗设备的第一台架角度下的解剖结构的不同视图。例如,软件程序144可以处理一组ct或mr图像并且创建投影图像的堆栈,所述投影图像描绘了ct或mr图像中在放射治疗设备的台架的各个视角下描绘的解剖结构的不同视图。特别地,一种投影图像可以表示在台架的0度下的解剖结构的视图,第二投影图像可以表示在台架的45度下的解剖结构的视图,而第三投影图像可以表示在台架的90度下的解剖结构的视图。所述度数可以是mlc相对于ct或mr图像中描绘的解剖结构的特定轴的位置。对于被测量的不同度数中的每一个,轴可以保持相同。
58.在示例中,软件程序144可以生成mlc叶片位置在各个台架角度下的图形孔径图像表示。这些图形孔径图像也称为孔径图像。特别地,软件程序144可以接收一组控制点,所述控制点用于控制放射治疗装置产生放射治疗束。控制点可以表示束强度、相对于患者位置的台架角度、以及mlc的叶片位置以及其他机器参数。基于这些控制点可以生成图形图像,来以图形方式表示由mlc在每个特定台架角度下输出的束形状和强度。软件程序144可以将
在特定台架角度下的孔径的每个图形图像与在所生成的那个角度下的相应的投影图像对准。图像与投影对准并且按比例缩放,使得每个投影图像像素与相应的孔径图像像素对准。
59.在示例中,软件程序144存储治疗计划软件。治疗计划软件可以包括为表示在给定台架角度下的解剖结构视图的解剖结构的投影图像生成或估计mlc叶片位置在给定台架角度下的图形孔径图像表示的经训练的机器学习模型。软件程序144还可以包括计算针对给定类型的机器的机器参数或控制点以从mlc输出束的束模型,该束实现mlc叶片位置的相同或相似的估计的图形孔径图像表示。即,治疗计划软件可以输出图像,该图像表示针对给定台架角度和针对该台架在该角度下的给定投影图像的束形状和强度的估计图像,并且该功能可以计算针对给定放射治疗装置的控制点以实现该束形状和强度。
60.在一些示例中,软件程序144可以包括机器故障检测和诊断(fdd)软件包147。fdd软件包147可以包括经训练的深度学习模型,诸如卷积神经网络(cnn)、循环神经网络(rnn)、深度信念网络(dbn)或由两个或更多个不同类型或不同模型配置的神经网络模型组成的混合神经网络。可以是放射治疗系统100的子系统的预测性维护系统可以被配置成使用fdd软件包147执行预测性机器维护。在示例中,经训练的深度学习模型可以用于检测和诊断诸如linac系统中的dlg的放射治疗机器的一部分的故障。下面诸如参照图7至图9讨论训练深度学习模型以及使用所述模型来检测和诊断与dlg相关联的故障的示例。
61.除了存储软件程序144的存储器116之外,软件程序144可以附加地或替选地存储在可移除计算机介质上,该可移除计算机介质诸如硬盘驱动器、计算机盘、cd-rom、dvd、hd、蓝光dvd、usb闪存驱动器、sd卡、记忆棒或任何其他合适的介质;并且当软件程序144被下载至数据处理装置112时可以由数据处理器114执行该软件程序144。
62.数据处理器114可以以通信方式以通信方式耦接至存储器116,并且处理器114可以被配置成执行存储在存储器116中的计算机可执行指令。处理器114可以向存储器116发送医学图像146或者从存储器116接收医学图像146。例如,处理器114可以经由通信接口118和网络120从图像获取装置132接收要存储在存储器116中的医学图像146。处理器114还可以将存储在存储器116中的医学图像146经由通信接口118发送到网络120,以存储在数据库124或医院数据库126中。
63.数据处理器114可以利用软件程序144(例如治疗计划软件)连同医学图像146和患者数据145来创建放射疗法治疗计划142。医学图像146可以包括诸如与患者解剖区域、器官或感兴趣的分割数据量相关联的成像数据的信息。患者数据145可以包括如下信息,诸如:(1)功能性器官建模数据(例如串行器官与并行器官、适当的剂量响应模型等);(2)放射剂量数据(例如dvh信息);或(3)关于患者和治疗的其他临床信息(例如其他手术、化学治疗、先前的放射治疗等)。
64.在一些示例中,数据处理器114(或单独的处理器)可以是预测性维护系统的一部分,该预测性维护系统被配置成执行诸如检测和诊断机器故障或失灵的预测性机器维护。数据处理器114可以执行fdd软件包147以生成故障(诸如与靶放射治疗机器的dlg相关联的故障)的检测和诊断。可以使用一个或更多个传感器137或者与放射治疗系统100分开的传感器或测量装置来感测指示dlg的配置和操作状态的机器数据(也称为dlg数据)。dlg数据可以存储在数据库124中。在一些示例中,至少一些dlg数据可以经由诸如用户接口136中的输入装置提供给放射治疗系统100,并且存储在数据库124中。数据处理器114可以接收存储
在数据库124中的dlg数据,以及执行fdd软件包147以检测dlg故障,将dlg故障诊断为归因于制动器故障、电路板故障或驱动电机故障中的一个或更多个,从而确定dlg故障的严重性,或预测故障的时间(或剩余使用寿命,或“rul”)。
65.在一些示例中,作为预测性维护系统的一部分的数据处理器114可以被配置成使用从相应的linac机器的一个或更多个正常(无故障)dlg收集的数据和从具有已知或专家判定故障类型的相应的linac机器的一个或更多个故障dlg收集的数据来训练深度学习模型。dlg数据连同表示故障存在/不存在或故障类型的相对应的故障标签统称为训练数据,并且可以提供给数据处理器114以训练深度学习模型。经训练的深度学习模型当满足指定的训练收敛标准时,可以存储在存储器116或数据库124中。
66.另外,处理器114可以利用软件程序来生成诸如例如要由诸如神经网络模型的机器学习模型使用的更新后的参数的中间数据;或者生成中间2d或3d图像,然后,该中间2d或3d图像可以随后被存储在存储器116中。然后,处理器114可以随后将可执行的放射疗法治疗计划142经由通信接口118传送到网络120以至放射治疗装置130,其中,放射治疗计划可以用于用放射来治疗患者。另外,处理器114可以执行软件程序144以实现诸如图像转换、图像分割、深度学习、神经网络和人工智能的功能。例如,处理器114可以执行训练医学图像或描绘医学图像轮廓的软件程序144;这样的软件程序144当被执行时可以训练界限检测器或利用形状字典。
67.处理器114可以是处理装置,包括:一个或更多个通用处理装置,诸如微处理器、中央处理单元(cpu)、图形处理单元(gpu)、加速处理单元(apu)等。更具体地,处理器114可以是复杂指令集计算(cisc)微处理器、精简指令集计算(risc)微处理器、超长指令字(vliw)微处理器、实现其他指令集的处理器、或实现指令集的组合的处理器。处理器114还可以由诸如专用集成电路(asic)、现场可编程门阵列(fpga)、数字信号处理器(dsp)、片上系统(soc)等的一个或更多个专用处理装置来实现。如本领域技术人员将理解的,在一些实施方式中,处理器114可以是专用处理器而不是通用处理器。处理器114可以包括一个或更多个已知的处理装置,诸如来自由intel
tm
制造的pentium
tm
、core
tm
、xeon
tm
或系列的微处理器、来自由amd
tm
制造的turion
tm
、athlon
tm
、sempron
tm
、opteron
tm
、fx
tm
、phenom
tm
系列的微处理器、或者由sun microsystems制造的各种处理器中的任何处理器。处理器114还可以包括图形处理单元,诸如来自由nvidia
tm
制造的系列、由intel
tm
制造的gma、iris
tm
系列或者由amd
tm
制造的radeon
tm
系列的gpu。处理器114还可以包括加速处理单元,诸如由intel
tm
制造的xeon phi
tm
系列。所公开的实施方式不限于以其他方式被配置成满足识别、分析、维护、生成和/或提供大量数据或操纵这样的数据以执行本文中公开的方法的计算需求的任何类型的处理器。另外,术语“处理器”可以包括多于一个处理器(例如多核设计或均具有多核设计的多个处理器)。处理器114可以执行存储在存储器116中的计算机程序指令序列以执行如以下要更详细说明的各种操作、过程、方法。
68.存储器装置116可以存储医学图像146。在一些实施方式中,医学图像146可以包括一个或更多个mri图像(例如2d mri、3d mri、2d流式mri、四维(4d)mri、4d体积mri、4d影像mri等)、功能性mri图像(例如fmri、dce-mri、扩散mri)、ct图像(例如2d ct、锥形束ct、3d ct、4d ct)、超声图像(例如2d超声、3d超声、4d超声)、表示mri中描绘的解剖结构视图的一个或更多个投影图像、合成ct(伪ct)和/或台架相对于患者轴的不同角度下的ct图像、pet
128、放射治疗装置130和图像获取装置132之间的数据传输。此外,由ois 128和/或图像获取装置132生成的数据可以被存储在存储器116、数据库124和/或医院数据库126中。根据需要,可以通过通信接口118经由网络120传送/接收数据以便由处理器114访问该数据。
74.数据处理装置112可以通过网络120与数据库124进行通信以发送/接收数据库124上存储的多个各种类型的数据。例如,数据库124可以存储与放射治疗装置130、图像获取装置132或与放射治疗有关的其他机器相关联的机器数据。机器数据信息可以包括控制点,诸如放射束尺寸、弧放置、束开启和关闭的持续时间、机器参数、分割、mlc配置、台架速度、mri脉冲序列等。在一些示例中,数据库124可以存储表示放射治疗系统300的一部分,例如linac机器的dlg的配置和操作状态的机器数据。另外,数据库124可以存储可以用于训练用于检测和诊断部件故障或失灵的深度学习模型的训练数据。训练数据可以包括从来自放射治疗机器的正常dlg和故障dlg获取的机器数据。数据库124可以是存储装置并且可以配备有适当的数据库管理软件程序。本领域技术人员将理解,数据库124可以包括以中央式或分布式方式定位的多个装置。
75.在一些实施方式中,数据库124可以包括处理器可读存储介质(未示出)。虽然实施方式中的处理器可读存储介质可以是单个介质,但是术语“处理器可读存储介质”应被视为包括存储一组或更多组计算机可执行指令或数据的单个介质或多个介质(例如集中式或分布式数据库和/或相关联的高速缓存和服务器)。术语“处理器可读存储介质”还应被视为包括能够存储或编码指令集的任何介质,所述指令集由处理器执行并且使处理器执行本公开内容的方法中的任何一种或更多种方法。因此,术语“处理器可读存储介质”应被视为包括但不限于固态存储器、光学介质和磁介质。例如,处理器可读存储介质可以是一个或更多个易失性、非暂态或者非易失性有形计算机可读介质。
76.数据处理器114可以与数据库124进行通信以将图像读取到存储器116中或者将来自存储器116的图像存储到数据库124。例如,数据库124可以被配置成存储数据库124从图像获取装置132接收到的多个图像(例如3d mri、4d mri、2d mri切片图像、ct图像、2d荧光透视图像、x射线图像、来自mr扫描或ct扫描的原始数据、医学数字成像与通信(dicom)数据、投影图像、图形孔径图像等)。数据库124可以存储由数据处理器114在执行软件程序144时或者在创建放射疗法治疗计划142时要使用的数据。数据库124可以存储所得的预测数据和由诸如包括构成由网络学习的模型的网络参数的神经网络的经训练的机器学习模式产生的数据。数据处理装置112可以或从数据库124、放射治疗装置130(例如mr-linac)和/或从图像获取装置132接收诸如医学图像146(例如2d mri切片图像、ct图像、2d荧光透视图像、x射线图像、3d mri图像、4d mri图像、投影图像、图形孔径图像等)的图像数据以生成治疗计划142。
77.在实施方式中,放射治疗系统100可以包括图像获取装置132,图像获取装置132可以获取患者的医学图像(例如mri图像、3d mri、2d流式mri、4d体积mri、ct图像、锥形束ct、pet图像、功能mri图像(例如fmri、dce-mri和扩散mri)、x射线图像、荧光透视图像、超声图像、放射治疗射野图像、spect图像等)。图像获取装置132例如可以是mri成像装置、ct成像装置、pet成像装置、超声装置、荧光透视装置、spect成像装置或者用于获得患者的一个或更多个医学图像的任何其他合适的医学成像装置。由图像获取装置132获取的图像可以或作为成像数据和/或作为测试数据而存储在数据库124内。通过示例的方式,由图像获取装
置132获取的图像也可以作为医学图像146由数据处理装置112存储在存储器116中。
78.在实施方式中,例如,图像获取装置132可以与放射治疗装置130集成为单个设备。例如,mr成像装置可以与线性加速器组合以形成被称为“mr-linac”的系统。这样的mr-linac可以用于例如确定患者内的靶器官或靶肿瘤的位置,以便根据放射疗法治疗计划142将放射治疗准确地定向至预定靶。
79.图像获取装置132可以被配置成针对感兴趣区域(例如靶器官、靶肿瘤或两者)获取患者解剖结构的一个或更多个图像。每个图像——通常是2d图像或切片——可以包括一个或更多个参数(例如2d切片厚度、取向和位置等)。在实施方式中,图像获取装置132可以获取任何取向的2d切片。例如,2d切片的取向可以包括矢状取向(sagittal orientation)、冠状取向(coronal orientation)或轴向取向。处理器114可以对诸如2d切片的厚度和/或取向的一个或更多个参数进行调整以包括靶器官和/或靶肿瘤。在实施方式中,可以根据诸如3d mri体积的信息来确定2d切片。例如,当使用放射治疗装置130时,在患者正在接受放射疗法治疗的同时可以由图像获取装置132“实时”获取这样的2d切片,其中“实时”意味着至少以数毫秒或更短时间来获取数据。
80.数据处理装置112可以生成并且存储针对一个或更多个患者的放射疗法治疗计划142。放射疗法治疗计划142可以提供关于要施加给每个患者的特定放射剂量的信息。放射疗法治疗计划142还可以包括诸如包括束角度、台架角度、束强度、剂量直方图-体积信息、治疗期间要使用的放射束的数目、每束的剂量等的控制点的其他放射治疗信息,。
81.数据处理器114可以通过使用诸如治疗计划软件(例如由瑞典的医科达有限公司制造的)的软件程序144来生成放射疗法治疗计划142。为了生成放射疗法治疗计划142,数据处理器114可以与图像获取装置132(例如ct装置、mri装置、pet装置、x射线装置、超声装置等)进行通信以访问患者的图像并且描绘诸如肿瘤的靶。在一些实施方式中,可能需要诸如肿瘤围围或接近肿瘤的健康组织的一个或更多个oar的描绘。因此,当oar靠近靶肿瘤时,可以执行对oar的分割。另外,如果靶肿瘤靠近oar(例如,前列腺接近膀胱和直肠),则通过从肿瘤分割oar,放射治疗系统100不仅可以研究靶中的剂量分布,而且还可以研究oar中的剂量分布。
82.为了从oar描绘靶器官或靶肿瘤,可以通过图像获取装置132非侵入式地获得正在接受放射治疗的患者的诸如mri图像、ct图像、pet图像、fmri图像、x射线图像、超声图像,放射治疗射野图像、spect图像等的医学图像以揭露身体部位的内部结构。基于来自医学图像的信息,可以获得相关解剖部分的3d结构。另外,在治疗计划过程中,可以考虑许多参数以实现对靶肿瘤的有效治疗(例如,使得靶肿瘤接受足够的放射剂量以便有效治疗)与对oar的低照射(例如,oar接收尽可能低的放射剂量)之间的平衡。可以考虑的其他参数包括靶器官和靶肿瘤的位置、oar的位置以及靶相对于oar的移动。例如,可以通过在mri或ct图像的每个2d层或切片内描绘靶的轮廓或描绘oar的轮廓并且将每个2d层或切片的轮廓进行组合来获得3d结构。可以手动地(例如,由医师、剂量师或医护人员使用诸如由瑞典的医科达有限公司制造的的程序)或自动地(例如,使用诸如由瑞典医科达有限公司制造的基于atlas的自动分割程序软件abas
tm
的程序)生成轮廓。在某些实施方式中,可以通过治疗计划软件自动地生成靶肿瘤或oar的3d结构。
83.在靶肿瘤和oar已经被定位并且描绘之后,剂量师、医师或医护人员可以确定要施
加至靶肿瘤的放射剂量以及可以由接近肿瘤的oar(例如左右腮腺、视神经、眼睛、晶状体、内耳、脊髓、脑干等)接收的剂量的任何最大剂量。在针对每个解剖结构(例如靶肿瘤、oar)确定了放射剂量之后,可以执行已知为逆向计划的过程以确定将实现期望的放射剂量分布的一个或更多个治疗计划参数。治疗计划参数的示例包括体积描绘参数(例如其限定靶体积、轮廓敏感结构等)、围绕靶肿瘤和oar的余裕、束角度选择、准直器设置和束开启时间。在逆向计划过程期间,医师可以限定剂量约束参数,剂量约束参数设置oar可以接受多少放射的界限(例如,限定对肿瘤靶的全剂量和对任何oar的零剂量;限定对靶肿瘤的95%的剂量;限定脊髓、脑干和视神经结构分别接受≤45gy、≤55gy和《54gy)。逆向计划的结果可以构成可以被存储在存储器116或数据库124中的放射疗法治疗计划142。这些治疗参数中的一些可以是相互关联的。例如,以试图改变治疗计划的方式调整一个参数(例如,针对不同目标的权重,例如增加对靶肿瘤的剂量)可能会影响至少一个其他参数,这进而可能导致不同的治疗计划的发展。因此,数据处理装置112可以生成具有这些参数的定制的放射疗法治疗计划142以便放射治疗装置130向患者提供放射疗法治疗。
84.另外,放射治疗系统100可以包括显示装置134和用户接口136。显示装置134可以包括向用户显示医学图像、接口信息、治疗计划参数(例如投影图像、图形孔径图像、轮廓、剂量、束角度等)、治疗计划、靶、定位靶和/或跟踪靶或者任何相关信息的一个或更多个显示屏。用户接口136可以是键盘、小键盘、触摸屏或用户可以向放射治疗系统100输入信息的任何类型的装置。替选地,显示装置134和用户接口136可以集成到诸如平板电脑(例如苹果联想三星等)的装置。
85.此外,放射治疗系统100的任何和所有部件可以被实现为虚拟机(例如vmware、hyper-v等)。例如,虚拟机可以是用作硬件的软件。因此,虚拟机可以包括一起用作硬件的至少一个或更多个虚拟处理器、一个或更多个虚拟存储器和一个或更多个虚拟通信接口。例如,数据处理装置112、ois 128、图像获取装置132可以被实现为虚拟机。鉴于处理能力、存储器和计算能力可得到,整个放射治疗系统100可以被实现为虚拟机。
86.图2a示出了示例性放射治疗装置202,该放射治疗装置202可以包括放射源(例如x射线源或linac)、床216、成像检测器214和放射治疗输出204。放射治疗装置202可以被配置成发射放射束208以向患者提供治疗。放射治疗输出204可以包括诸如mlc的一个或更多个衰减器或准直器。mlc可以叶片组,每个叶片组由多个mlc叶片组成。叶片组可以被安装在使得mlc叶片能够快速移动的相应的dlg上,使得可以使放射治疗束成形并且被引导至患者身上的指定靶部位。mlc和dlg的示例在下面诸如参照图3至图5讨论。
87.患者可以被定位在区域212中并且由床216支承以根据放射疗法治疗计划接受放射治疗剂量。放射治疗输出204可以被安装或附接至台架206或其他机械支承件。当床216被插入至治疗区域中时,一个或更多个底盘电机(未示出)可以使台架206和放射治疗输出204围绕床216旋转。在实施方式中,当床216被插入至治疗区域中时,台架206可以围绕床216连续地旋转。在另一实施方式中,当床216被插入至治疗区域中时,台架206可以旋转至预定位置。例如,台架206可以被配置成使治疗输出204围绕轴(“a”)旋转。床216和放射治疗输出204两者可以是能够独立地移动至围绕患者的其他位置,诸如能够在横向方向(“t”)上移动、能够在侧向方向(“l”)上移动,或者如围绕一个或更多个其他轴旋转,诸如围绕横轴(指示为“r”)旋转。以通信方式连接至一个或更多个致动器(未示出)的控制器可以控制床216
移动或旋转,以便根据放射疗法治疗计划将患者适当地定位在放射束208之内或之外。床216和台架206两者能够以多个自由度彼此独立地移动,这允许将患者定位成使得放射束208可以精确地以肿瘤为靶。mlc可以与台架206集成在一起以递送特定形状的放射束208。
88.图2a中示出的坐标系(包括轴a、t和l)可以具有位于等中心210处的原点。等中心可以被定义为其中放射束208的中心轴与坐标轴的原点相交的位置,以便将规定的放射剂量递送至患者上或患者内的位置。替选地,等中心点210可以被定义为下述位置:其中对于由台架206定位的放射治疗输出204围绕轴a的各种旋转位置,放射束208的中心轴与患者相交。如本文中所讨论的,虽然任何其他轴或轴的组合都可以被参考并且用于确定台架角度,但是台架角度对应于台架206相对于轴a的位置。
89.台架206可以具有附接的成像检测器214,成像检测器214优选地与放射治疗输出204相对。在实施方式中,成像检测器214可以位于治疗束208的场内。成像检测器214可以保持与治疗束208对准。成像检测器214可以随着台架206旋转而围绕旋转轴旋转。在实施方式中,成像检测器214可以是平板检测器(例如直接检测器或闪烁体检测器)。以这种方式,成像检测器214可以用于监视治疗射束208,或者成像检测器214可以用于对患者的解剖结构进行诸如射野成像的成像。放射治疗装置202的控制电路系统可以集成在系统100内或远离系统100。
90.在说明性实施方式中,床216、治疗输出204或台架206中的一个或更多个可以被自动地定位,并且治疗输出204可以根据用于特定治疗递送实例的指定剂量来建立治疗束208。可以根据放射疗法治疗计划(诸如,使用台架206、床216或治疗输出204的一个或更多个不同的取向或位置)来指定治疗递送序列。治疗递送可以顺序地发生,但是可以在患者上或患者内的期望的治疗部位中(例如等中心210处)相交。由此可以将放射治疗的规定的剂量递送至治疗部位,同时可以减少或避免对治疗部位附近的组织的损害。
91.图2b示出了将放射系统(例如linac)与ct成像系统组合的示例性放射治疗装置202。放射治疗装置202可以包括mlc(未示出)。ct成像系统可以包括诸如以千电子伏特(kev)能量范围提供x射线能量的成像x射线源218。成像x射线源218可以提供指向诸如平板检测器的成像检测器222的扇形和/或锥形束208。放射治疗装置202可以类似于关于图2a描述的诸如包括放射治疗输出204、台架206、床216和另一成像检测器214(诸如平板检测器)的系统。x射线源218可以提供用于成像的相对较低能量的x射线诊断束。
92.如图2b中所示,放射治疗输出204和x射线源218可以被安装在同一旋转台架206上,旋转地彼此分开90度。在一些示例中,可以沿着台架206的外围安装两个或更多个x射线源,使得每个x射线源具有其自己的检测器布置以同时提供多个角度的诊断成像。类似地,可以提供多个放射治疗输出204。
93.图3示出了将放射系统(例如linac)与核mr成像系统组合的示例性放射治疗系统300,该放射治疗系统300也称为mrlinac系统。这样的组合系统也称为mr linac系统。系统300可以包括床216、图像获取装置320和放射递送装置330。系统300可以根据放射疗法治疗计划(例如在存储器116中创建和存储的治疗计划142)向患者递送放射治疗。在一些实施方式中,图像获取装置320可以对应于图1中的可以获取第一模态的图像(例如mir图像)或者第二模态的目标图像(例如ct图像)的图像获取装置132。
94.床216可以在治疗期间支承患者。在一些实现中,床216可以沿着水平平移轴(标记
为“i”)移动,使得床216可以将倚靠在床216上的患者移入和/或移出系统300。床216还可以围绕横向于平移轴的中心竖直旋转轴旋转。为了允许这样的移动或旋转,床216可以具有使床能够在各个方向上移动并且沿着各个轴旋转的电机(未示出)。控制器(未示出)可以控制这些移动或旋转以便根据治疗计划适当地定位患者。
95.在一些实施方式中,图像获取装置320可以包括mr成像机器,mr成像机器用于在治疗阶段之前、期间和/或之后获取患者的2d或3d mri图像。图像获取装置320可以包括用于生成用于磁共振成像的主磁场的磁体321。通过磁体321的操作而生成的磁场线可以基本上平行于中心平移轴“i”延伸。磁体321可以包括具有平行于平移轴“i”延伸的轴的一个或更多个线圈。在一些实施方式中,磁体321中的一个或更多个线圈可以间隔开,使得磁体321的中心窗口323没有线圈。在其他实施方式中,磁体321中的线圈可以足够薄或具有减小的密度,使得线圈对于由放射治疗装置330生成的波长的放射基本上是透射的。在一些实施方式中,图像获取装置320还可以包括一个或更多个屏蔽线圈,该一个或更多个屏蔽线圈可以在磁体321外部生成近似相等的幅度和相反极性的磁场,以便消除或减小磁体321外部的任何磁场。如下所述,放射治疗装置330的放射源331可以被定位在磁场至少被消除至一阶或被减小的区域中。
96.图像获取装置320还可以包括两个梯度线圈325和326,这两个梯度线圈325和326可以生成叠加在主磁场上的梯度磁场。线圈325和326可以在所产生的磁场中生成梯度,该梯度允许对质子进行空间编码使得可以确定质子的位置。梯度线圈325和326可以与磁体321一起围绕公共中心轴被定位,并且可以沿着该中心轴被移位。该移位可以在线圈325与线圈326之间创建间隙或窗口。在磁体321包括在线圈之间的中心窗323的实施方式中,两个窗口可以彼此对准。
97.在一些实施方式中,图像获取装置320可以是除mri之外的成像装置,诸如x射线、ct、cbct、螺旋ct、pet、spect、光学断层扫描、荧光成像、超声成像、放射治疗射野成像装置等。如本领域的普通技术人员将认识到的,图像获取装置320的以上描述涉及某些实施方式,而不旨在限制。
98.放射治疗装置330可以包括放射源331(例如x射线源或linac)以及诸如mlc 332的准直器。准直器是可以有助于使从机器出来的放射束成形并且可以限制束的最大场大小的束限制装置。mlc 332可以用于对到患者内的指定靶部位的放射治疗束进行成形、指引或对放射治疗束的强度进行调制。mlc 332可以包括金属准直器板(也称为mlc叶片),该金属准直器板滑入形成期望的场形状的位置。叶片组可以被安装在使得mlc叶片能够快速移动的相应的dlg 334上。放射治疗装置330可以被安装在底盘335上。当床216被插入至治疗区域中时,一个或更多个底盘电机(未示出)可以使底盘335围绕床216旋转。在实施方式中,当床216被插入至治疗区域中时,底盘335可以围绕床216连续地旋转。底盘335还可以具有附接的放射检测器(未示出),该放射检测器优选地位于与放射源331相对并且底盘335的旋转轴定位在放射源331与检测器之间。此外,装置330可以包括用于控制例如床216、图像获取装置320和放射治疗装置330中的一个或更多个的控制电路系统(未示出)。放射治疗装置330的控制电路系统可以集成在系统300内或远离系统300。
99.在放射疗法治疗期间,患者可以被定位在床216上。然后系统300可以将床216移动至由磁体321和线圈325、326以及底盘335限定的治疗区域中。然后,控制电路系统可以控制
放射源331、mlc 332和底盘电机以根据放射疗法治疗计划通过线圈325和326之间的窗口将放射递送至患者。
100.图2a至图2b和图3中示出的放射治疗输出配置,诸如其中放射治疗输出可以围绕中心轴(例如轴“a”)旋转的配置,是出于说明的目的而非限制。可以使用其他放射治疗输出配置。例如,放射治疗输出可以被安装至具有多个自由度的操纵器或机械臂。在又一实施方式中,治疗输出可以是固定的(诸如,位于与患者横向分开的区域中),并且可以使用支承患者的平台来将放射治疗等中心与患者内的指定靶部位对准。
101.图4是示出可以在诸如mr-linac机器的放射治疗系统中使用的示例性准直器400的图。准直器的一个示例是agility
tm
准直器(瑞典的医科达有限公司)。准直器400可以包括束成形部件,束成形部件包括mlc叶片410、隔膜(diaphram)420和dlg 430。作为mlc叶片332的实施方式的mlc叶片410可以由称为mlc叶片的金属准直器板阵列组成。mlc叶片可以具有弯曲的叶片端部。在示例中,mlc叶片可以由钨合金制成。mlc叶片可以布置成两个单独的mlc叶片组。在示例中,mlc可以包括160个叶片,160个叶片布置成每个都80个叶片的叶片组。每个mlc叶片组包含在相应的dlg 430内并且安装在其上。作为dlg 334的实施方式的dlg 430可以在平行于mlc叶片的布置的方向(y方向,沿着图4中示出的y1或y2轴)上与mlc叶片410一起移动。图4示出了包含在第一dlg中的第一叶片组,以及位于与第一叶片组相对并且包含在第二dlg中的第二叶片组。第一组中的mlc叶片可以沿着y1轴移动,并且第二组中的mlc叶片可以沿着与y1轴相反的y2轴移动。第一dlg称为dlg-y1,并且第二dlg称为dlg-y2。通过同时发生的叶片和dlg移动,可以实现快速的mlc移动和有效的束成形。在非限制性示例中,mlc叶片410的最大速度大约是35毫米每秒(mm/s),并且dlg 420的最大速度大约是30mm/s。因此,当dlg 420和mlc叶片410在同一方向上移动时,最大可能叶片速度可以大约是65mm/s。在非限制性示例中,dlg 420内的mlc叶片的最大行程可以是大约200mm,并且dlg具有大约150mm的行程范围(在等中心处测量)。因此,叶片的最大超程(overtravel)可以大约是150mm。
102.一对造型的隔膜420(也称为夹片)可以正交于mlc叶片410安装。在示例中,隔膜420可以关于中心轴超程特定距离,诸如在非限制性示例中高达150mm。隔膜420可以在垂直于mlc叶片行进方向(y方向)的方向(x方向)上移动。如图4中示出的,第一隔膜可以沿着x1轴移动,并且第二隔膜可以沿着与x1轴相反的x2轴移动。在示例中,隔膜420可以具有大约90mm/s的最大速度。隔膜可以具有圆形的放射限定边缘。mlc叶片410和隔膜420两者具有圆形的末端。在一些示例中,隔膜420可以具有提供完全衰减的“厚”区域以及其中由叶片和隔膜两者提供衰减的“薄”区域。
103.dlg 420可以耦接至dlg驱动系统,dlg驱动系统包括以期望的速度和方向驱动dlg 420的电动机、动力传动装置、制动器以及其他部件。控制器可以耦接至驱动系统以控制dlg 420的运动。如前面讨论的,dlg与机器中的其他高速移动部件一样,可能会经受故障和失灵。这些故障可能与dlg驱动系统或控制系统的一个或更多个部件(诸如电机、传动装置、一个或更多个制动器、支承运动的dlg的线性滑轨或连接不同部件的耦接单元)相关联。这些故障的及时且准确的检测(包括早期检测或预测)和诊断对于确保正确的系统操作和准确地向患者递送放射治疗可能是重要的。本文献中讨论的各种实施方式,包括参照图6a至图6c以及图7至图8讨论的基于深度学习的fdd,可以改进放射治疗设备的预测性维护。
104.图5示出了示例性mlc 530,以及示例性mlc可以在其中使用的环境的一部分。mlc 530可以是mlc 430或mlc 232的实施方式。通过示例而非限制的方式,mlc 530可以包括叶片532a至叶片532j,叶片532a至叶片532j可以被自动地定位以限定近似肿瘤540横截面或投影的孔径。叶片532a至叶片532j允许放射治疗束的调制。根据放射治疗计划,叶片532a至叶片532j可以由被指定用于衰减或阻挡除了孔径之外的区域中的放射束的材料制成。例如,叶片532a至叶片532j可以包括金属板(例如包括钨),其中板的长轴平行于束方向取向,并且具有与束方向正交取向的末端(如图2a的图示平面中所示)。mlc 332的“状态”可以在放射疗法治疗的过程期间自适应地调整,以便建立更好地接近肿瘤540或其他靶部位的形状或位置的治疗束。这是与使用静态准直器配置相比,或者与使用专门使用“离线”治疗计划技术确定的mlc 332配置相比。使用mlc332对肿瘤或肿瘤内的特定区域产生指定放射剂量分布的放射治疗技术可以被称为imrt。使用mlc 332输出的所得的束形状被表示为图形孔径图像。即,生成给定的图形孔径图像以表示束在穿过mlc 332并由mlc 332输出之后看起来如何(束形状)及其强度。
105.图6a至图6c是示出在dlg故障之前和期间以及在所述dlg故障已经被校正之后从各种mr-linac系统的dlg收集的机器数据的示例性趋势的图。在这些示例中考虑了不同类型的dlg故障。机器数据可以包括指定时间段内物理参数的测量结果的序列。可以从dlg驱动系统或控制系统的一个或更多个部分(诸如电动机、动力传动装置、制动器、线性滑轨或连接不同部件的耦接单元)进行测量。
106.在示例中,测量的dlg数据可以包括当准直器处于激活操作时的dlg电流测量结果。可以在相应的y1或y2轴(例如如图4中示出的dlg-y1或dlg-y2)处从一个或更多个dlg测量分别由i
y1
和i
y2
指示的电流。dlg电流i
y1
和i
y2
可以具有浮点值。在另一示例中,dlg数据可以包括dlg-y1或dlg-y2中的一个或更多个的位置。位置数据可以由数字坐标或者dlg偏离位置事件的分类标志表示,dlg偏离位置事件指示dlg(例如dlg-y1或dlg-y2)在其移动至预置位置时未能达到指定的速度。在示例中,dlg数据可以包括在指定时间段内已经发生的分别由np
y1
和np
y2
指示的与dlg-y1相关联或与dlg-y2相关联的偏离位置事件的计数。偏离位置事件计数np
y1
和np
y2
可以具有整数值。
107.在又一示例中,dlg数据可以包括由一个或更多个警报事件触发的警报,或由n_alarm指示的在指定时间段期间警报的计数。警报计数n_alarm可以具有整数值。通过示例而非限制的方式,警报事件可以包括:(1)“终止的mlc错误警报”,其是可以由包括dlg的准直器的许多部件触发的通用mlc终止警报;(2)“终止的mlc not ok警报”,其对应于治疗的意外终止,诸如由于dlg的位置不正确、振荡或其他问题;(3)“mlc lost leaf反射器警报(reflector alarm)”,其在dlg行驶太慢或太快时可能出现,使得单个叶片的叶片反射器可能不在预期位置,并且叶片反射器丢失且稍后短时间段内多次发现;(4)“反射器未校准警报”,其在一个或更多个参考反射器的位置已经丢失时可能出现,使得至少需要反射器的校准;(5)“终止的dlg-y1位置警报”,其指示dlg-y1的终止;或(6)“终止的dlg-y2位置警报”,其指示dlg-y2的终止。
108.可以连续地、周期性地或根据指定的数据获取计划来获取如上面所讨论的dlg数据。在一些示例中,可以根据dlg电流测量结果、dlg偏离位置事件计数或警报计数来生成统计度量(例如平均值、中间值、最大值(max)、最小值(min)、范围、方差、标准差(sd)或其他高
阶统计数字)或累积度量(例如和、移动总和或移动平均值)。通过示例而非限制的方式,可以根据dlg电流测量结果来生成一个或更多个度量,以下称为dlg电流度量。dlg电流度量的示例可以包括以下各项中的一项或更多项:(1)每小时电流度量,诸如每小时平均i
y1
或每小时平均i
y2
、或者每小时最大i
y1
或每小时最大i
y2
;或(2)每日电流度量,诸如i
y1
或i
y2
的每日平均值、每日最大值或每日sd。在示例中,可以使用在长达24小时的若干小时内测量的每小时平均电流来计算至少一些每日电流度量(例如i
y1
或i
y2
的每日平均值、最大值或sd)。在另一示例中,可以使用在长达24小时的指定小时数内测量的每小时最大电流来计算至少一些每日电流度量(例如,i
y1
或i
y2
的每日平均值、最大值或sd)。在一些示例中,dlg度量可以包括在指定天数的移动时间窗口(例如5天移动窗口)内计算的每日电流度量的移动平均值。移动平均电流度量的示例可以包括每日平均电流的移动平均值,其中每日平均电流可以在长达24小时的指定小时数内基于每小时平均电流或基于每小时最大电流而确定。可以分别针对dlg-y1(例如基于每小时i
y1
)或dlg-y2(例如基于每小时i
y2
)计算每小时电流度量、每日电流度量或者每日电流度量的移动平均值中的每一个。
109.除了统计dlg电流度量之外,还可以计算dlg偏离位置事件计数的度量。dlg偏离位置事件度量的示例可以包括以下各项中的一项或更多项:(1)在长达24小时的若干小时内的每日计数np
y1
或每日计数np
y2
;(2)在指定天数的移动时间窗口(例如5天移动窗口)内的np
y1
的移动总和或np
y2
的移动总和;或(3)在指定天数的移动时间窗口(例如5天移动窗口)内的np
y1
的移动平均值或np
y2
的移动平均值。附加地或替选地,可以计算dlg警报计数的度量,通过示例而非限制的方式,其可以包括以下各项中的一项或更多项:(1)在长达24小时的若干小时内警报的每日计数(n_alarm);(2)在指定天数的移动时间窗口(例如5天移动窗口)内n_alarm的移动总和;或(3)在指定天数的移动时间窗口(例如5天移动窗口)内n_alarm的移动平均值。可以针对如上面所讨论的一种或更多种类型的警报事件分别计算警报计数的每日计数、移动总和或移动平均值。替选地或附加地,可以跨所有警报事件计算警报计数的每日计数、移动总和或移动平均值,而与警报类型无关。
110.图6a至图6c每个都示出了多个dlg度量的示例性趋势。通过示例而非限制的方式,这些数据趋势可以包括:每日平均电流i
y1
(y1_mean_mean);每日最大电流i
y1
(y1_max_mean,一天内每小时最大电流i
y1
的平均值);每日平均电流i
y2
(y2_mean_mean);每日最大电流i
y2
(y2_max_mean,一天内每小时最大电流i
y2
的平均值);在5天移动窗口内y1偏离位置事件计数np
y1
的移动总和(y1_event_ms);在5天移动窗口内y2偏离位置事件np
y2
的移动总和(y2_event_ms);以及在5天移动窗口内警报计数n_alarm的移动总和(alarm_ms)。在这些附图中的每一个中,t1表示启动用于预测或检测dlg故障的早期迹象的预测性维护阶段的时间。t2表示识别(例如由人类专家)故障类型的开始(onset)时间,并且t3表示当校正或解决所述故障类型的时间。因此,故障预测窗口可以限定在t1与t2之间,并且故障出现在t2和t3之间的窗口。
111.图6a示出了对应于与dlg的印刷电路板(pcb)相关联的故障(“pcb故障”)的dlg度量的趋势。在该示例中,pcb故障伴随着t2与t3之间的四个dlg电流度量(y1_mean_mean、y1_max_mean、y2_mean_mean和y2_max_mean)随着时间推移而升高。pcb故障的校正伴随着t3之后四个dlg电流度量的回退。在其他度量中,y1和y2的每日平均电流(y1_mean_mean和y2_mean_mean)都在pcb故障的开始之前增加,从而表明这些度量在预测这种类型的pcb故障方
面的能力。
112.图6b示出了对应于与dlg制动器相关联的故障(“制动器故障”)的dlg度量的趋势。在该示例中,在t2与t3之间,制动器故障伴随着与y2相关联的度量(y2_mean_mean、y2_max_mean和y2_event_ms)比与y1相关联的度量随着时间推移更显著的升高。制动器故障的校正伴随着t3之后与y2相关联的所述度量的回退。与y2相关联的所述度量也在制动器故障的开始之前增加,从而表明这些度量在预测这种类型的制动器故障方面的能力。
113.图6c示出了对应于涉及pcb和dlg制动器两者的混合故障的dlg度量的趋势。在该示例中,混合故障伴随着t2与t3之间的四个dlg电流度量(y1_mean_mean、y1_max_mean、y2_mean_mean和y2_max_mean)随着时间推移的升高。混合故障的校正伴随着t3之后四个dlg电流度量的回退。在其他度量中,所述四个dlg电流度量均在混合故障的开始之前增加,从而表明这些度量在预测这种类型的混合故障方面的能力。
114.图7a是示出用于训练fdd深度学习(dl)模型(或机器学习模型)以及使用经训练的fdd模型检测和诊断与放射治疗系统中的一个或更多个部件(例如linac系统中的dlg)相关联的故障的示例性过程700a的图。过程700a可以实现为诸如fdd软件包147的一部分的存储在放射治疗系统100的存储器116中的计算机可读和可执行指令。输入704可以包括具有初始一组值的特定深度学习模型710和训练数据720。深度学习模型710的示例可以包括卷积神经网络(cnn)、循环神经网络(rnn)、深度信念网络(dbn)或者包括不同类型或不同模型配置的两个或更多个神经网络模型的混合神经网络。
115.现在参照图7b,可以在过程700a中构造和使用cnn 700b。cnn网络可以自动地从样本中学习数据的特性,从而消除通常需要大量专业知识的常规机器学习模型中复杂的特征提取。cnn的附加优点在于通过权重共享的方式,可以大大减少cnn参数的规模。结果,可以降低训练过程的复杂性,可以提高收敛速度,并且可以增强模型泛化能力。
116.通过示例而非限制的方式,如图7b中示出的cnn 700b可以包括一个输入层751、中间学习层752以及形成全连接输出层的致密层753。在示出的示例中,中间学习层752包括四个卷积层(例如四个一维卷积层或如示出的“conv1d”)和一个全局平均池化层。全局平均池化层可以减少网络的权重参数并且降低训练复杂性。可以在每个卷积层之后执行批量归一化(bn)操作。在一些示例中,可以在每个中间层中使用非线性激活层。激活函数的示例是修正线性单元(relu)。bn层可以改进流经网络的梯度,解决梯度消失的问题,允许更大的学习速率,改进训练速度,减少对初始化的强依赖,改进正则化策略,减少丢弃法(dropout)的需要,以及有效地改进cnn网络的泛化能力。
117.现在参照图7c,可以在过程700a中构造和使用rnn。rnn包括节点之间的连接以形成沿着时间序列的有向图。该有向图可以使用内部状态(存储器)来存储过去的信息,并且网络决策受到其从过去学到的东西的影响。这使得rnn适于处理输入的序列。在示例中,可以使用长短期记忆(lstm)网络。lstm是一种类型的rnn架构,其特征在于反馈连接。常见的lstm单元可以由元(cell)组成,输入门决定要向元添加多少新信息,遗忘门决定哪些信息要丢弃或保留在元中,以及输出门决定要输出的值。lstm元可以记住任意时间间隔内的值,并且三个门可以调整进出元的信息流,这使得lstm网络特别适于顺序学习和模式识别(例如,基于诸如时间系列数据的整个数据序列而处理、分类和做出预测)。
118.通过示例而非限制的方式,图7c示出了lstm网络700c,lstm网络700c可以包括一
个输入层761、中间学习层762和可以作为全连接输出层的致密层763。中间学习层762可以包括二至四个lstm层(例如如图7c中示出的三个lstm层)。为了防止模型的过拟合,可以在每个lstm层之后执行丢弃法操作。致密层753可以是全连接输出层。在示例中,l2正则化可以实现在全连接层中。正则化是通过向目标函数(或代价函数或损失函数)添加惩罚项来控制模型复杂性的过程。对于l2正则化,惩罚项被定义为等于神经网络模型中特征权重的幅度的平方的l2范数。所得的代价函数可以包括估计误差项(例如平方误差项的总和)和惩罚项。l2正则化的使用可以帮助实现训练模型,其中可以实现模型复杂性与预测性能之间优选的平衡。
119.现在返回参照图7a,训练数据720可以包括dlg数据722和预期结果724。dlg数据722可以从多个放射治疗系统(例如linac机器)中的dlg收集,所述dlg包括例如一个或更多个正常(即无故障)dlg和具有识别故障的一个或更多个故障dlg。对于每个dlg,对应的dlg数据722可以包含关于dlg的配置和操作状态的信息。在一些示例中,dlg数据722可以包括如上面参照图6a至图6c所讨论的一个或更多个dlg度量,例如一个或更多个统计或累积dlg电流度量、统计或累积dlg偏离位置事件计数中的一个或更多个或者统计或累积dlg警报计数中的一个或更多个。在一些示例中,dlg度量的值可以在指定时间段(例如,20天至30天)内呈现趋势以形成度量序列(例如时间系列)。对应于多个dlg度量的这样的dlg度量序列可以分别针对正常和故障dlg生成以形成训练数据720。在示例中,指定数目(n)的dlg度量(包括如上文所讨论的统计或累积dlg电流指标、统计或累积dlg偏离位置事件计数或者统计或累积dlg警报计数中的一个或更多个)可以各自在指定天数(m)内呈现趋势。训练数据720可以由二维(m
×
n)数据矩阵表示。诸如参照图9,下面讨论使用dlg度量趋势构造训练数据集720的示例。
120.预期结果724可以包括对正常dlg和故障dlg的指定,例如表示故障存在/不存在和故障类型的故障标签。故障标签可以由人类专家提供。在示例中,正常dlg被标记为“0”,而故障dlg各自具有表示故障类型的数字故障标签,例如代表dlg制动器故障的“1”,代表dlg电路板故障的“2”,代表涉及制动器和电路板两者的混合故障的“3”,代表驱动电机故障的“4”,代表dlg线性滑轨故障(例如润滑滑轨)的“5”或者代表dlg耦接故障(例如松动耦接)等故障类型的“6”。
121.深度学习(dl)模型训练过程708包括训练数据预处理和选择模块731。训练数据预处理尤其可以减轻训练数据的某些缺陷。这样的缺陷中的一个是训练集720中的正常(无故障)dlg数据集(也称为“负”样本)与故障dlg数据集(也称为“正”样本)之间的数据不平衡。在示例中,负样本与正样本的比例可以是6:1至10:1。数据不平衡可能影响经训练的深度学习模型在预测、检测和诊断故障方面的性能。数据预处理731可以使用一种或更多种技术(诸如欠采样、过采样、改变正负样本的惩罚权重、增强深度学习模型的代价函数中的惩罚项以及模型一体化)来减轻数据不平衡。根据本文献中讨论的各种实施方式,过采样、正负样本的惩罚权重调整以及模型一体化用于对训练数据进行预处理。这些技术可以尽可能地保留原始数据中的信息。在示例中,至少基于样本大小将不同的惩罚权重分配给正负样本。在示例中,惩罚权重可以与样本大小成反比。例如,可以将较大的权重分配给训练集中通常具有较小样本大小的正样本(对应于dlg故障),而可以将较小的权重分配给训练集中通常具有较大样本大小的负样本(对应于正常dlg)。
122.可以附加地或替选地使用数据增强过程来减轻数据不平衡以提高与一个或更多个dlg故障相关联的正样本的数目。例如,数据增强过程可以包括交换与识别制动器故障相关联的dlg-y1数据与dlg-y2数据。通过数据交换,与制动器故障相关联的正样本可以增加一倍。附加地或替选地,合成少数过采样技术(smote)可以用于基于现有实际测量的少数样本而合成附加的少数样本(正样本或与识别故障相关联的dlg数据),并且因此降低数据不平衡的程度。smote从现有少数样本的角度进行思考,并且在距其朝向其邻元素中中的一个某个距离(在特征空间中)处合成新样本。聚类方法可以用于生成新样本以防止模型过拟合,模型过拟合可能是由现有样本的简单过采样引起的。
123.训练数据的另一缺陷是训练集与其他集(诸如测试集或实际预测集)之间的不一致的样本分布。不一致的数据分布可能会导致经训练的模型,该经训练的模型虽然在测试集中表现良好,但是在实际预测集中不能提供令人满意的预测准确度。为了克服不同数据集之间样本分布的不一致性,可以将迁移学习模块添加至深度学习模型。迁移学习是一种方法,其中针对一个任务开发的模型被重复利用为关于不同但相关问题的模型的起点。通过模型重复利用,迁移学习可以大大地加快模型训练过程速度,并且在对第二问题进行建模时改进性能。根据各种实施方式,迁移学习可以应用于经训练的深度学习模型,诸如在训练数据上训练的n层cnn或lstm模型。然后可以冻结前n-1层的模型参数,并且新数据集(例如与用于训练cnn或lstm模型的训练集不同的预测集)可以用于调整仅最后一层(第n层)的参数,最后一层可以是全连接层。在示例中,用于训练最后一个全连接层的预测集可以包括在与训练数据不同的时间(例如不同的日期)收集的dlg数据。
124.如图7a中示出的,预处理的dlg数据可以被馈送至深度学习模型中以生成估计结果732,诸如存在或不存在故障的决策,或者决定是否存在故障的故障类型。然后可以将在732处估计的故障检测和诊断与预期结果724进行比较(例如,“0”代表无故障,并且非零数代表不同的识别故障类型)。可以在733处计算差异或估计误差。在734处,可以将估计误差与模型收敛或训练停止标准(诸如针对指定数目的训练迭代进行持续的最小值)进行比较。
125.如果在734处确定尚未满足收敛或训练停止标准,则估计误差可以用于诸如通过反向传播来更新深度学习模型的参数(例如层节点权重和偏差),以减少或最小化随后训练试验期间的估计误差或机器参数的误差。然后可以从训练数据720和预期结果中选择另一批训练数据以用于深度学习模型训练的另一迭代。
126.在实施方式中,可以执行使用估计误差的模型参数更新以最小化或减小代价函数(或目标函数、或损失函数),诸如等式(1)中给出的代价函数:
127.j(θ
*
)=arg min
θ
||y-y
*
||2ꢀꢀꢀ
(1)
128.其中y可以表示机器参数或由深度学习模型确定的故障检测或分类,其中y
*
可以表示已知机器参数或真值故障识别,并且其中θ
*
可以表示对应于y与y
*
之间的最小平方误差的深度学习模型的模型参数(例如如上所述的层节点权重和偏差)。
129.更新深度学习模型的参数之后,迭代索引可以递增一。迭代索引可以对应于已经更新深度学习模型的参数的次数。可以在734处检查收敛或训练停止标准。在实施方式中,收敛或停止标准可以包括迭代索引的值(例如,收敛或停止标准可以包括迭代索引是否大于或等于确定的迭代的最大数目)。在实施方式中,收敛或停止标准可以包括机器参数的输出集的准确度或累积的估计误差(例如,收敛或停止标准可以包括估计的dlg故障与跨训练
数据的批的已识别的dlg故障的真值之间的累积差异是否小于阈值)。在示例中,阈值可以对应于所确定的所有误差的渐近最小值。
130.如果在734处确定已经满足收敛或停止标准,则可以将经训练的dl模型740保存在诸如数据处理装置112的存储器器件116的存储器中,并且可以停止训练。经训练的模型740可以在测试或推理阶段712期间用于使用从靶放射治疗系统收集的测试dlg数据742来预测和诊断dlg故障并生成预测结果744。
131.深度学习诸如如上面所讨论的cnn模型或rnn模型(例如lstm模型)的模型,可以涉及许多模型参数,所述许多模型参数包括例如滑动窗口长度、网络层的数目、隐藏神经元的数目、以及丢弃法丢弃率等。为了改进故障诊断,网格搜索方法可以用于优化一个或更多个模型参数。也称为参数扫描的网格搜索是以下过程,该过程通过手动指定的学习算法的超参数空间的子集进行扫描以及在每个参数组合上建立模型。网格搜索遍及每个参数组合进行迭代并且针对每个组合存储模型,评估每个参数组合的性能度量,以及确定给定模型的最佳参数组合。
132.与其他超参数优化方法(例如遗传算法、随机搜索算法、粒子群优化、贝叶斯算法等)相比,网格搜索方法易于实现并且被配置为并行计算,并且可以满足需要基于顺序dlg数据的故障检测和分类。
133.在一些示例中,可以使用两步法(two-step approach)训练深度学习模型。在第一步中,故障检测模型被训练成检测故障的存在或不存在。在随后的第二步中,故障诊断模型被训练成将从第一步中检测到的故障中的每一个分类为故障类别中的一个。因为第一步基本上将所有不同故障类型的正样本分组在一起,所以两步法可以有利地帮助减少样本大小不平衡的影响并改进fdd准确度。
134.在一些示例中,可以在经训练的模型740用于使用测试dlg数据742预测和诊断故障之前评估经训练的模型740。经训练的模型740可以应用于验证集,该验证集可以包括一组dlg数据样本,例如如所附图9中示出的数据序列。验证数据可以不同于训练数据720。验证集中的每个样本可以由模型740识别为真正(tp)、假正(fp)、真负(tn)和假负(fn)中的一个。tp表示其中真实值为正(例如,dlg有故障或具有特定故障类型fx)并且dl模型预测相同的故障状态或故障类型fx的dlg数据样本。fn表示其中真实值为正并且dl模型预测相反(例如,dlg实际上有故障但模型预测没有故障,或者dlg具有特定故障类型fx但模型预测不同的故障类型fy)的dlg数据样本。fp表示其中真实值为负但模型预测相反(例如,dlg正常但模型预测故障,或者dlg没有故障fx但模型预测fx)的dlg数据样本。tn表示其中真实值为负(dlg正常,或没有故障fx)并且dl模型预测相同的dlg数据样本。
135.使用从验证集中识别的tp、fn、fp和tn样本的计数,可以生成一个或更多个性能度量。在示例中,性能度量可以包括定义为tp/(tp+fp)的精度(也称为正预测值)。精度表示实际上故障的所有类型的所有模型检测到的故障dlg的分数(例如百分比),或者实际上具有所述特定故障类型的特定类型的所有模型检测到的故障dlg的分数。性能度量的另一示例可以包括定义为tp/(tp+fn)的召回率(也称为灵敏度)。召回率表示由模型识别为故障的所有类型的所有故障dlg的分数,或者由模型识别为具有所述特定故障类型的特定类型的所有故障dlg的分数。附加地或替代地,性能度量可以包括如以下公式中给出的定义为准确度和召回率的调和平均值的平衡的f1分数。f1分数范围在0与1之间,其中f1在1处达到其最佳
值(完美的精度和召回率),并且在0处最差。
[0136][0137]
另一性能度量是如下定义的马修斯相关系数(mcc)。mcc是观察到的二元分类与预测的二元分类之间的相关系数,并且取-1与1之间的值。
[0138]
该值越接近1,模型预测越准确。
[0139][0140]
在各种示例中,可以将一个或更多个性能度量与预置的性能标准(诸如性能阈值)进行比较。如果基于验证集确定的性能度量满足性能标准,则雨(rained)dl模型740可以用于使用测试dlg数据742来预测和诊断故障;否则,可以调整模型740的一个或更多个参数,或者可以使用附加的训练dlg数据来重新训练模型740。
[0141]
在一些示例中,mcc可以用于修改用于训练dl模型的代价函数,诸如上面等式(1)中给出的代价函数。在代价函数中添加正负样本不平衡的惩罚,不仅可以改进训练模型的准确度,而且可以减少数据不平衡的影响。将基于mcc的惩罚项(通过惩罚权重λ缩放)引入代价函数以确定损失。等式(4)是损失函数的示例,该损失函数包括基于二元交叉熵的基础损失分量和基于mcc的附加惩罚项:
[0142]
损失=二元交叉熵+λ*(1-mcc)
ꢀꢀꢀ
(4)
[0143]
在一些示例中,可以使用过程700a来训练dl模型以将dlg故障分类为多个故障严重性级别中的一个。故障严重性可以基于dlg度量的趋势。例如,如果dlg度量值超过特定阈值,则故障被识别为“严重”故障,或者如果dlg度量值低于所述特定阈值,则故障被识别为“轻微”故障。为了诸如根据过程700a训练深度学习模型,训练数据集可以被构造成使得每个训练样本(例如如所附图9中示出的dlg数据序列)被分配有严重性级别。可以是预期结果724的一部分的严重性级别可以采用分类值或数值。经训练的模型740可以用于将从测试dlg数据742检测到的故障分类为轻微故障或严重故障。参照图9讨论构造训练数据集720和将相应的严重性级别分配给训练样本的示例。
[0144]
在一些示例中,故障诊断可以包括预测的故障的时间,也称为剩余使用寿命(rul)。rul表示从正在预测的机器部件的故障时刻到当所述故障实际出现并需要维护或更换的时间间隔。关于rul的信息可以帮助维护人员计划维护、优化操作效率并且避免计划外停机。在诸如根据过程700a的模型训练期间,训练数据集可以被构造成使得可以针对每个训练样本确定rul值(例如如所附图9中示出的dlg数据序列)。在示例中,rul值可以通过训练样本的时间与当dlg度量值达到指定阈值的时间之间的天数来表示。可以是预期结果724的一部分的rul值可以用于训练预测测试dlg742的rul的深度学习模型。参照图9讨论构造训练数据集720和确定用于训练样本的相应的rul值的示例。
[0145]
尽管本文献聚焦于基于深度学习的dlg故障检测和诊断,但是这通过示例而非限制的方式。如本领域技术人员将理解的,根据本文献中讨论的各种示例的系统、装置、过程可以用于检测和诊断与放射治疗系统的其他部分或部件(例如mlc)相关联的故障。
[0146]
图8是示出组合两个深度学习模型,也称为(子模型的)模型融合的fdd深度学习模型800的示例性架构的图。在示例中,被融合的子模型可以是具有至少一个不同模型参数的
相同类型的模型(例如具有不同模型结构的两个cnn模型)。在另一示例中,被融合的子模型可以是不同类型的模型(例如与lstm模型组合的cnn)。因为不同的深度学习模型在训练之后具有不同的表达能力,所以集成模型可以结合子模型的优势,因此改进整体的故障预测和诊断性能。
[0147]
如图8中示出的示例包括多层深度学习模型,该多层深度学习模型包括输入层810、学习层820和输出层830。学习层820包括两个不同的dl模型,或相同类型但不同参数的dl模型。作为示例,由“第一模型+第二模型”指示的模型融合可以包括lstm+lstm、lstm+cnn或cnn+cnn。在示出的示例中,第一模型821包括三个cnn层(例如三个一维卷积层或“conv1d”层)。每个cnn层包括修正线性单元(relu)激活函数和批量归一化(bn)。relu激活可以帮助改进cnn模型的特征表示。bu操作可以缓解内部协变量偏移问题。conv-bn-relu序列可以改进cnn网络的性能。第二模型822包括两个lstm层,每个层之间具有丢弃法层以防止lstm层过拟合。需要注意的是,图8中示出的两个模型的融合用于说明而非限制。在一些示例中,相同或不同类型的三个或更多个模型可以被包括在融合模型中,这已经被本发明人设想并且在本文献的范围内。
[0148]
输出层830可以包括级联层831和softmax激活层832。级联层831是将来自第一模型821和第二模型822的多个输出级联成单个输出的效用(utility)层。softmax激活层832将softmax函数应用于级联输出以产生表示dlg故障的存在或不存在或者dlg故障类型的分类输出。在示例中,分类输出可以通过整数表示,诸如“0”代表无故障,“1”代表dlg制动器故障,“2”代表dlg电路板故障,“3”代表涉及制动器和电路板两者的混合故障,“4”代表驱动电机故障,“5”代表dlg线性滑轨故障(例如润滑滑轨),或“6”代表dlg耦接故障等。
[0149]
图9是示出生成训练fdd深度学习模型的训练数据的示例的图,fdd深度学习模型可以检测和诊断与放射治疗机器中的一个或更多个部件相关联的故障。可以使用从部件(诸如linac系统中的dlg)获得的测量结果来构造训练日期。物理参数(例如dlg电流i
y1
或i
y2
)或dlg度量的测量结果可以随着时间推移呈现趋势以形成数据序列901(例如时间系列)。可以通过使物理参数或dlg度量随着时间推移呈现趋势以生成数据序列901,诸如图6a至图6c中示出的时间系列。具有指定天数(例如20天至30天)的窗口大小(l)的移动窗口910可以沿着时间轴以指定的步长大小δl(例如1天)滑动。每个数据窗口内的dlg数据形成训练样本。训练样本的“预期结果”,诸如表示故障存在/不存在、故障类型或故障严重性的故障标签,可以基于数据窗口相对于一个或更多个参考时间t1、t2、ts或t3的时间位置来确定。t1表示开始dlg故障预测的时间,此时窗口910开始形成数据序列。t2表示当数据序列901跨越并超过第一阈值th1时的时间,第一阈值th1指示已识别的dlg故障(例如,由人类专家识别的)的开始。ts表示当数据序列901跨越并超过第二阈值th2时的时间。t3表示当已识别的dlg故障被校正或解决的时间。第一阈值th1和第二阈值th2可以由维护人员基于工程经验而确定。在如图9中示出的示例中,th2可以大于th1。这些阈值被设置成防止早期警报或晚期警报,并且可以根据故障预测和诊断的性能而动态地调整。
[0150]
当窗口(例如窗口910)在时间t2之前完全下降(即,窗口的右边缘未达到或超过t2)时,所述窗口的训练样本分配有指示不存在dlg故障的故障标签“0”。当移动窗口滑动并且开始跨越时间t2(例如窗口920)时,所述窗口的训练样本分配有指示存在dlg故障的非零故障标签(例如“1”)。当移动窗口滑动并且开始跨越时间t3(例如窗口930)时,所述窗口的
训练样本分配有指示dlg故障已经被校正的标签“0”。然后窗口滑动过程继续,直到窗口的左边缘达到时间t3(例如窗口940)。此时,窗口滑动过程停止。如此生成的数据序列(包括窗口910至窗口940和中间窗口)连同与训练样本相关联的故障标签一起形成训练数据集。训练数据集可以用于训练如上面参照图7a所讨论的检测和诊断dlg故障的深度学习模型。
[0151]
可以将不同的故障标签分配给区分不同故障类型或不同故障严重性的相应的训练样本。在示例中,故障严重性可以基于数据序列901的信号幅度。如上面所讨论的,参考时间ts是当数据序列901跨越并超过第二阈值th2时的时间。基于数据窗口相对于ts的时间位置,数据窗口可以被标记为轻微故障或严重故障。如图9中示出的,轻微故障区可以定义为t2与ts之间的时间间隔,并且严重故障区可以定义为ts与t3之间的时间间隔。其右边缘落在t2与ts之间的数据窗口(例如窗口920a)分配有轻微故障的标签(例如数字故障标签“1”)。轻微故障窗口内的数据样本低于阈值th2。其右边缘落在ts与t3之间的数据窗口(例如窗口920b)分配有严重故障的标签(例如数字故障标签“2”)。严重故障窗口内的数据样本的至少一部分超过阈值th2。数据窗口中的训练样本及其相关联的故障标签可以用于训练深度学习模型以区分轻微故障与严重故障。
[0152]
图9还示出了针对数据窗口中的训练样本确定故障的时间或剩余使用寿命(rul)。对于数据窗口,rul可以被确定为数据窗口的右边缘与参考时间ts之间的间隔。因此,可以针对具有故障标签“0”(无故障)和“1”(轻微故障)的数据窗口中的每个数据窗口确定rul。数据窗口中的训练样本及其相关联的rul值可以用于训练深度学习模型以预测给定dlg的rul。
[0153]
在一些示例中,具有小于rul阈值(rul
th
)的rul的那些数据窗口可以分配有不同的故障标签(例如“11”)以区别于可以分配有不同的故障标签(例如“12”)的具有大于rul
th
的rul的数据窗口。在示例中,rul
th
大约是10天。与标记为“12”的故障相比,标记为“11”的故障具有短的rul,因此可能会造成更高的未来故障风险并且需要服务人员提高意识和预防性维护。数据窗口中的训练样本及其相关联的故障标签(例如“11”和“12”)可以用于训练深度学习模型以区分具有不同rul的轻微故障。
[0154]
图10是示出检测和诊断被配置成向病人提供放射治疗的放射治疗机器中的故障(例如与诸如系统202或系统300的放射治疗系统中的动态叶片引导件(dlg)相关联的故障)的示例性方法1000的流程图。方法1000可以体现在用于由一个或更多个处理器执行的计算机可读指令中,使得方法1000的操作可以部分或全部地由数据处理装置112的功能性部件来执行;因此,下面通过参照其的示例方式来描述方法1000。然而,在其它实施方式中,方法1000的操作中的至少一些操作可以部署在各种其他硬件配置上。因此,方法1000不旨在限于数据处理装置112,而是可以全部或部分地由任何其他部件来实现。方法1000的操作中的一些或所有操作可以是并行的、无序的或被完全省略。
[0155]
在1010处,可以诸如由数据处理装置112接收从一个或更多个正常dlg和一个或更多个具有识别故障的故障dlg收集的机器数据。接收到的机器数据可以指示相应的dlg的配置和操作,因此也被称为dlg数据。在一些示例中,dlg数据可以包括如上面参照图6a至图6c所讨论的一个或更多个dlg度量,诸如一个或更多个统计或累积dlg电流度量、统计或累积dlg偏离位置事件计数中的一个或更多个或者统计或累积dlg警报计数中的一个或更多个。连同在1010处接收到的dlg数据的是正常dlg和故障dlg的故障标签,这些故障标签可以由
人类专家提供。在示例中,正常dlg具有故障标签“0”,并且故障dlg每个都具有表示特定故障类型的故障标签,诸如代表dlg制动器故障的“1”,代表dlg电路板故障的“2”,代表涉及制动器和电路板两者的混合故障的“3”,代表驱动电机故障的“4”,代表dlg线性滑轨故障(例如润滑滑轨)的“5”或者代表dlg耦接故障(例如松动耦接)等故障类型的“6”。
[0156]
在1020处,可以使用从正常dlg和故障dlg两者接收到的机器数据来构造训练数据集。在一些示例中,dlg度量的值可以在指定的时间段内呈现趋势以形成度量序列(例如时间系列),并且可以诸如根据如图9中示出的过程使用移动数据窗口来提取训练样本。对于每个训练样本,故障标签可以诸如由人类专家经由用户接口提供,并且分配给训练样本。故障标签可以采用数值或分类值,并且表示故障存在/不存在、故障类型或故障严重性。在一些示例中,可以基于数据窗口相对于一个或更多个参考时间的时间位置来确定故障标签,如图9中所示。训练样本和对应的故障标签形成输入-输出训练对。
[0157]
训练数据集可以被处理成减轻某些缺陷,诸如正常(无故障)dlg数据集(也称为“负”样本)与故障dlg数据集(也称为“正”样本)之间的数据不平衡。各种技术可以用于处理训练数据集,包括过采样、正负样本的惩罚权重调整以及模型一体化用于预处理训练数据。在示例中,至少基于样本大小将不同的惩罚权重分配给正负样本。惩罚权重可以与样本大小成反比。可以使用数据增强过程或合成少数过采样技术(smote)来附加地或替选地减轻数据不平衡,以合成附加的少数样本。附加地或替选地,为了克服不同数据集之间样本分布的不一致性,可以将迁移学习模块添加至深度学习模型。
[0158]
在1030处,可以使用所构造的训练数据集、诸如使用如图7a中示出的过程来训练深度学习模型。经训练的深度学习模型可以包括卷积神经网络(cnn)、循环神经网络(rnn)、深度信念网络(dbn)或者包括不同类型或不同模型配置的两个或更多个神经网络模型的混合神经网络。图7b和图7c示出了cnn模型和长短期记忆(lstm)网络(一种类型的rnn模型)的示例。
[0159]
在模型训练期间,可以更新模型参数以最小化或减小代价函数。代价函数可以包括诸如等式(1)中给出的估计误差项(例如平方误差项的总和)。代价函数可以附加地包括惩罚项。在示例中,惩罚项是等于神经网络模型中特征权重的幅度的平方的l2范数,并且用于控制模型复杂性。在另一示例中,惩罚项可以诸如由等式(4)给出的基于马修斯相关系数(mcc)。可以在模型训练期间检查收敛或训练停止标准。如果确定了已经满足收敛或停止标准,则可以停止训练。经训练的模型可以保存在存储器中。在一些示例中,可以评估经训练的模型,并且可以生成一个或更多个性能度量,性能度量可以包括精度、召回率、平衡的f1分数或mcc等。
[0160]
在1040处,可以接收指示靶放射治疗机器中的dlg的配置和操作的机器数据。dlg度量可以从机器数据中生成。在1050处,可以将经训练的深度学习模型应用于与靶放射治疗机器的dlg对应的dlg度量数据。取决于分配给训练数据集中训练样本的故障标签,经训练的模型可以用于检测(包括早期检测或预测)故障存在或不存在、将故障分类为多种故障类型中的一个、或预测故障严重性级别。
[0161]
在1060处,可以使用经训练的模型检测dlg故障的存在的不存在。如果检测到dlg,则模型可以输出故障诊断。附加地或替选地,例如通过将故障分类为dlg制动器故障、dlg驱动电路板故障、dlg驱动电机故障、dlg滑轨故障或dlg耦接单元故障等中的一个或更多个可
以执行故障诊断。故障检测和诊断结果可以呈现给用户。用户可以查看故障诊断并且采取措施(诸如执行其他测试的),或者进行必要的修理或其他预防性或校正性措施。
[0162]
在一些示例中,对于每个训练样本,可以针对训练样本确定故障的时间或剩余使用寿命(rul),例如如上面参照图9所讨论的。深度学习模型可以被训练成预测靶放射治疗机器中的dlg的rul。
[0163]
图11示出了机器1100的实施方式的框图,在该机器1100上可以实现如本文中所讨论的方法中的一种或更多种。在一个或更多个实施方式中,数据处理装置112的一项或更多项可以由机器1100来实现。在替选的实施方式中,机器1100作为独立的装置进行操作,或者可以连接(例如联网)至其他机器。在一个或更多个实施方式中,数据处理装置112可以包括机器1100的项中的一项或更多项。在联网的部署中,机器1100可以在服务器客户端网络环境中以服务器或客户端机器的能力进行操作,或者在对等(或分布式)网络环境中作为对等机器进行操作。机器可以是个人计算机(pc)、平板pc、机顶盒(stb)、个人数字助理(pda)、蜂窝电话、网络设备、网络路由器、交换机或网桥或者能够(顺序地或以其他方式)执行指令的任何机器,这些指令指定要由该机器采取的动作。此外,尽管仅示出了单个机器,但是术语“机器”也应被理解为包括机器的任一集合,这些机器单独地或共同地执行一组(或多组)指令以执行本文中所讨论的方法中的任何一个或更多个。
[0164]
示例机器1100包括处理电路系统1102(例如cpu、图形处理单元(gpu)、asic、电路系统(例如一个或更多个晶体管、电阻器、电容器、电感器、二极管、逻辑门、复用器、缓冲器、调制器、解调器、无线电(例如,传送或接收无线电或者收发器))、传感器1121(例如,将一种形式的能量(例如光、热、电、机械或其他能量)转换成另一种形式的能量的换能器)等或者其组合)、主存储器1104和静态存储器1106,所述处理电路系统1102、主存储器1104和静态存储器1106经由总线1108彼此通信。机器1100(例如计算机系统)还可以包括视频显示单元1110(例如液晶显示器(lcd)或阴极射线管(crt))。机器1100还包括字母数字输入装置1112(例如键盘)、用户接口(ui)导航装置1114(例如鼠标)、磁盘驱动器或大容量存储单元1116、信号生成装置1118(例如扬声器)和网络接口装置1120。
[0165]
磁盘驱动器单元1116包括机器可读介质1122,在该机器可读介质1122上存储一组或更多组指令和数据结构(例如软件)1124,这些指令和数据结构(例如软件)体现本文中所述的方法或功能中的任何一种或更多种或者被本文中所述的方法或功能中的任何一种或更多种利用。在由机器1100执行指令1124期间,指令1124还可以全部或至少部分地驻留在主存储器1104内和/或在处理器1102内,主存储器1104和处理器1102也构成机器可读介质。
[0166]
如示出的机器1100包括输出控制器1128。输出控制器1128管理至/来自机器1100的数据流。输出控制器1128有时被称为装置控制器,其中直接与输出控制器1128交互的软件被称为装置驱动器。
[0167]
虽然在一个实施方式中机器可读介质1122被示出为单个介质,但是术语“机器可读介质”可以包括存储一个或更多个指令或者数据结构的单个介质或多个介质(例如集中式或分布式数据库、和/或相关联的缓存和服务器)。术语“机器可读介质”还应被认为包括能够存储、编码或携带指令或者能够存储、编码或携带数据结构的任何有形介质,这些指令由机器执行并且使机器执行本公开内容的方法中的任何一种或更多种方法,这些数据结构由这样的指令利用或与这样的指令相关联。因此,术语“机器可读介质”应被认为包括但不
限于固态存储器以及光学介质和磁介质。机器可读介质的特定示例包括非易失性存储器,所述非易失性存储器通过示例的方式包括:半导体存储器件,诸如可擦除可编程只读存储器(eprom)、eeprom和闪存器件;磁盘,例如内部硬盘和可移动磁盘;磁光盘;以及cd-rom和dvd-rom磁盘。
[0168]
还可以使用传输介质通过通信网络1126来传送或接收指令1124。可以使用网络接口装置1120和许多众所周知的传输协议(例如http)中的任何一种来传送指令1124。通信网络的示例包括lan、wan、因特网、移动电话网络、普通老式电话(pots)网络和无线数据网络(例如wifi和wimax网络)。术语“传输介质”应被认为包括能够存储、编码或携带由机器执行并且包括数字或模拟通信信号的指令的任何无形介质,或者便于这样的软件的通信的其他无形介质。
[0169]
如本文所使用的,“在
……
之间以通信方式耦接”指的是在耦接中的任何一个上的实体必须通过在其之间的项进行通信,并且这些实体如果不通过该项进行通信就不能彼此进行通信。
[0170]
补充注释
[0171]
以上的详细描述包括对附图的参照,这些附图形成详细描述的一部分。附图通过说明的方式而不是通过限制的方式示出了具体实施方式,在所述具体实施方式中可以实践本公开内容。这些实施方式在本文中也被称为“示例”。这些示例可以包括除了示出或描述的那些元素之外的元素。然而,本发明人还设想了提供仅示出或描述的那些元素的示例。此外,相对于特定示例(或其一个或更多个方面)或相对于在本文中示出或描述的其他示例(或其一个或更多个方面),本发明人还设想了使用示出或描述的那些元素的任何组合或置换(或其一个或更多个方面)的示例。
[0172]
本文献中参考的所有出版物、专利和专利文献都通过引用整体并入本文,就好像通过引用单独地并入一样。如果在本文献与通过引用并入的那些文献之间存在不一致用法,则并入的一个或更多个参考文献中的用法应被视为对本文献的用法的补充;对于矛盾的不一致之处,以本文献中的用法为准。
[0173]
在本文献中,在介绍本公开内容的各个方面或其实施方式中的元素时,如在专利文献中常见的那样,使用术语“一”、“一个”、“该”和“所述”以包括元素中的一个或多于一个或更多个,独立于“至少一个”或者“一个或更多个”的任何其他实例或用法。在本文献中,术语“或”被用于表示非排他性,或者,使得除非另有说明,否则“a或b”包括“a但不是b”、“b但不是a”以及“a和b”。
[0174]
在所附各方面中,术语“包括(including)”和“其中(in which)”被用作相应的术语“包括(comprising)”和“其中(wherein)”的通俗英语等同物。此外,在所附各方面中,术语“包含(comprising)”、“包括(including)”和“具有”旨在是开放性的,意指除了所列元素之外可能还有其他元素,使得在方面中的这样的术语(例如包含(comprising)、包括(including)、具有)之后的仍被认为落入该方面的范围。此外,在所附各方面中,术语“第一”、“第二”和“第三”等仅被用作标记,并且不旨在对其对象施加数字要求。
[0175]
本公开内容的实施方式可以用计算机可执行指令来实现。计算机可执行指令(例如软件代码)可以被组织成一个或更多个计算机可执行部件或模块。可以用任何数目的这样的部件或模块以及这样的部件或模块的任何组织来实现本公开内容的各个方面。例如,
本公开内容的各个方面不限于在附图中示出和在本文中描述的特定计算机可执行指令或者特定部件或模块。本公开内容的其他实施方式可以包括具有比本文中示出和描述的功能更多或更少的功能的不同的计算机可执行指令或部件。
[0176]
本文中描述的方法示例(例如操作和功能)可以至少部分地是机器或计算机实现的(例如,被实现为软件代码或指令)。一些示例可以包括编码有指令的计算机可读介质或机器可读介质,所述指令能够操作成配置电子装置来执行如在以上示例中所述的方法。这样的方法的实现可以包括软件代码例如微代码、汇编语言代码、高级语言代码等(例如“源代码”)。这样的软件代码可以包括用于执行各种方法的计算机可读指令(例如“对象”或“可执行代码”)。软件代码可以形成计算机程序产品的部分。可以经由在其上存储有代码或指令的制品,或者经由操作通信接口以经由通信接口(例如无线地、通过因特网、经由卫星通信等)发送数据的方法来提供本文中描述的实施方式的软件实现方式。
[0177]
此外,可以在执行期间或在其他时间将软件代码有形地存储在一个或更多个易失性或非易失性计算机可读存储介质上。这些计算机可读存储介质可以包括以可以由机器(例如计算装置、电子系统等)访问的形式存储信息的任何机构,例如但不限于软盘、硬盘、可移动磁盘、任何形式的磁盘存储介质、cd-rom、磁光盘、可移动光盘(例如压缩光盘和数字视频磁盘)、闪存器件、磁带盒、存储卡或存储棒(例如安全数字卡)、ram(例如cmos ram等)、可记录/不可记录介质(例如只读存储器(rom))、eprom、eeprom或者适于存储电子指令的任何类型的介质等。这样的计算机可读存储介质耦接至计算机系统总线以可以由处理器和ois的其他部分来访问。
[0178]
在实施方式中,计算机可读存储介质可以具有经编码的用于治疗计划的数据结构,其中,治疗计划可以是自适应的。用于计算机可读存储介质的数据结构可以是医学数字成像和通信(dicom)格式、扩展的dicom格式、xml格式等中的至少一种。dicom是一种定义用于在各种类型的医疗设备之间传输与医学图像有关的数据的格式的国际通信标准。dicom rt指的是特定于放射治疗的通信标准。
[0179]
在本公开内容的各种实施方式中,创建部件或模块的方法可以以软件、硬件或其组合来实现。例如,可以通过使用标准编程语言诸如例如c、c++、java、python等以及其组合以软件来实现由本公开内容的各种实施方式提供的方法。如本文中所使用的,术语“软件”和“固件”是可互换的,并且包括存储在存储器中以由计算机执行的任何计算机程序。
[0180]
通信接口包括与硬连线介质、无线介质、光学介质等中的任何一种接口连接(interface)以与另一装置进行通信的任何机构,例如存储器总线接口、处理器总线接口、因特网连接、磁盘控制器等。可以通过提供配置参数和/或发送信号来配置通信接口,以准备通信接口来提供描述软件内容的数据信号。可以经由被发送至通信接口的一个或更多个命令或信号来访问通信接口。
[0181]
本公开内容还涉及用于执行本文中的操作的系统。该系统可以针对所需目的专门地被构造,或者可以包括由存储在计算机中的计算机程序选择性地激活或重新配置的通用计算机。除非另有说明,否则本文示出和描述的本公开内容的实施方式中的操作的运行或执行的顺序不是必须的。也就是说,除非另有说明,否则可以以任何顺序来执行操作,并且与本文公开的那些操作相比,本公开内容的实施方式可以包括另外的操作或更少的操作。例如,设想到,在另一操作之前、与另一操作同时或在另一操作之后运行或执行特定操作落
入本公开内容的各方面的范围内。
[0182]
鉴于以上内容,可以实现本公开内容的若干目的并且获得了其他有利的结果。已经详细地描述了本公开内容的各方面,将明显的是,在不脱离如在所附各方面中限定的本公开内容的各方面的范围的情况下,修改和变化是可行的。由于可以在不脱离本公开内容的各方面的范围的情况下在以上构造、产品和方法中进行各种改变,因此旨在,以上描述中包含的和附图中示出的所有内容应被解释为说明性的,而并非在限制性的意义上。
[0183]
上面的描述旨在是说明性的,而不是限制性的。例如,上述示例(或其一个或更多个方面)可以彼此组合使用。另外,在不脱离本公开内容的范围的情况下,可以做出许多修改以使特定情况或材料适应本公开内容的教导。尽管本文中描述的材料和涂层的尺寸、类型旨在限定本公开内容的参数,但是其绝不是限制性的,而是示例性实施方式。在回顾以上描述之后,许多其他的实施方式对于本领域技术人员是明显的。因此,本公开内容的范围应参考所附各方面以及这样的各方面被赋予的等同物的全部范围来确定。
[0184]
此外,在以上的具体实施方式中,可以将各种特征组合在一起以简化本公开内容。这不应被解释为一种预期之外的公开特征对于任何方面是必要的意图。而是,发明主题可以在于少于特定公开的实施方式的所有特征。因此,所附各方面由此被并入具体实施方式中,其中每个方面独自作为单独的实施方式。本公开内容的范围应当参考所附各方面以及这样的各方面被赋予的等同物的全部范围来确定。此外,所附各方面的限制不以装置加功能的格式编写,并且也不旨在基于35u.s.c.
§
112第六段进行解释,除非这样的各方面的限制明确地使用之后是没有进一步的结构的功能陈述的短语“用于
……
的装置”。
[0185]
提供摘要以符合37c.f.r.
§
1.72(b),以允许读者快速地确定技术公开内容的实质。提交时应理解,其将不被用于解释或限制各方面的范围或含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1