腹腔内柔性组织呼吸实时图像矫正方法及装置
1.本发明涉及手术导航的技术领域,尤其涉及一种腹腔内柔性组织呼吸实时图像矫正方法,以及腹腔内柔性组织呼吸实时图像矫正装置。
背景技术:
2.随着微创介入和精准医学的迅速发展,基于图像的手术导航系统逐渐成为介入科手术主流,其主要是利用各种医学图像信息(us、ct、mri和pet多模态数据)为手术器械进行导航,最大可能地为医生提供手术部位附近的信息,在二维的医学图像与实际部位之间架一座桥梁,实现减少手术创伤,缩短手术时间,提高手术质量。
3.超声图像通过超声探头向人体内发射超声波,线性或扇形扫描,遇到不同声阻抗的组织,产生不同幅度的反射声波,由探头接收后经过信号处理显示在屏幕上,由于其低成本、实时、无创以及无辐射等优点常作为观察腹腔内脏器的首选方法。应用于腹腔部位的手术导航系统也常采用超声图像辅助引导。
4.由于腹腔内受呼吸运动影响较大,会引起术中患者空间位置与术前规划时空间位置发生偏移,影响手术导航精度。呼吸时由于肺部收缩使得膈肌带动肝脏及周围区域发生类周期运动,术中医生进行介入操作时,难以在运动的目标上执行静态的术前规划方案。目前基于超声引导的手术导航系统尚未对呼吸运动提出系统性的解决方案,但已有学者对此进行一些尝试,huang在2019年将基于二维超声的目标跟踪方法应用于腹部放射治疗中的运动监测系统,通过主成分分析及慢特征提取图像特征,k近邻算法寻找索引帧,用以估计目标位置,但缺少三维信息使得呼吸运动仅能在平面内矫正,由于实际术中二维超声平面内目标并不固定为同一切面,所以仅基于二维影像信息难以应用在临床上矫正术中的呼吸运动。因此,需要在术中进行实时的三维矫正,满足医生对于超声手术导航中的需求。
技术实现要素:
5.为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种腹腔内柔性组织呼吸实时图像矫正方法,其通过术中二维超声影像能够进行三维空间下的呼吸矫正,将术前规划随呼吸运动进行动态矫正,使术前规划的静态介入路径矫正为当前呼吸节点下的规划路径,术中无需医生额外操作,具有非常高的实用性。
6.本发明的技术方案是:这种腹腔内柔性组织呼吸实时图像矫正方法,其包括以下步骤:
7.(1)初始化影像参数,进行位姿配准及目标选取;
8.(2)术前运动分析,获取目标的空间位置;
9.(3)提取呼吸信号规律:实时跟踪目标在三维空间中的位置,同步跟踪体表传感器的空间位置,拟合出两个信号之间的映射关系;
10.(4)呼吸运动矫正:术中利用当前时刻体表传感器的空间位置预测目标在呼吸影响下的空间位置,在每一时刻都对术前规划的静态介入路径进行矫正。
11.本发明通过在术中实时跟踪二维超声平面内的目标位置,将局部图像通过与术前三维影像进行匹配,以获取超声平面在三维空间内的角度及位置,将矫正后的三维的位移矢量作用到术前规划的治疗方案上,将术前规划随呼吸运动进行动态矫正,使术前规划的静态介入路径矫正为当前呼吸节点下的规划路径,术中无需医生额外操作,具有非常高的实用性。
12.还提供了腹腔内柔性组织呼吸实时图像矫正装置,其包括:
13.初始化模块,其配置来初始化影像参数,进行位姿配准及目标选取;
14.分析模块,其配置来术前运动分析,获取目标的空间位置;
15.提取模块,其配置来提取呼吸信号规律:实时跟踪目标在三维空间中的位置,同步跟踪体表传感器的空间位置,拟合出两个信号之间的映射关系;
16.矫正模块,其配置来呼吸运动矫正:术中利用当前时刻体表传感器的空间位置预测目标在呼吸影响下的空间位置,在每一时刻都对术前规划的静态介入路径进行矫正。
附图说明
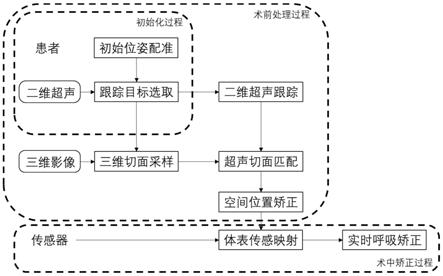
17.图1是根据本发明的腹腔内柔性组织呼吸实时图像矫正方法的流程图。
18.图2是本发明提供的获取目标空间位置示意图。
具体实施方式
19.如图1所示,这种腹腔内柔性组织呼吸实时图像矫正方法,其包括以下步骤:
20.(1)初始化影像参数,进行位姿配准及目标选取;
21.(2)术前运动分析,获取目标的空间位置;
22.(3)提取呼吸信号规律:实时跟踪目标在三维空间中的位置,同步跟踪体表传感器的空间位置,拟合出两个信号之间的映射关系;
23.(4)呼吸运动矫正:术中利用当前时刻体表传感器的空间位置预测目标在呼吸影响下的空间位置,在每一时刻都对术前规划的静态介入路径进行矫正。
24.本发明通过在术中实时跟踪二维超声平面内的目标位置,将局部图像通过与术前三维影像进行匹配,以获取超声平面在三维空间内的角度及位置,将矫正后的三维的位移矢量作用到术前规划的治疗方案上,将术前规划随呼吸运动进行动态矫正,使术前规划的静态介入路径矫正为当前呼吸节点下的规划路径,术中无需医生额外操作,具有非常高的实用性。
25.优选地,在所述步骤(1)中,在导航系统中跟踪体表传感器空间位置,与术前影像进行位姿配准,在二维超声影像中选取跟踪目标,当目标所处呼吸节点与术前影像最相近时记录目标空间位置p0,记录超声平面位置(θ0,r0),其中θ0为超声平面与y=0平面的夹角,为超声平面与z=0平面的夹角,r0为超声平面与z轴的截距。
26.优选地,在所述步骤(2)中,在术前影像中,以p0为中心,截取目标块b,对b进行空间采样得到若干个二维影像切片;患者自由呼吸时,在二维超声平面上进行跟踪,得到以目标为中心的局部二维超声影像u
t
,目标的空间位置p
t
,将u
t
与若干二维切片进行匹配,寻找最相似的切片,其平面位置(θ
t
,r
t
)为u
t
当前位置,计算p
t
在(θ0,r0)平面的投影点,得到当前目标的真实空间位置。
27.更进一步地,在所述步骤(2)中,对b进行以p0为球心的球坐标空间采样,得到n个二维切面(θi,ri),其中i=1,2
…
,n;t时刻,在二维超声中目标空间位置为p
t
,以p
t
为中心截取包含完整目标的局部影像u
t
,将u
t
与每一个二维切面(θi,ri)进行基于局部结构性梯度的相似性度量,寻找最佳匹配切面(θ
t
,r
t
),此时p
t
为切面(θ
t
,r
t
)上的点,建立平面(θ0,r0)与平面(θ
t
,r
t
)的转换关系t
t
,将t
t
作用于p
t
即可得到当前目标的真实空间位置p
t
→0。
28.优选地,在所述步骤(3)中,采用多项式拟合方式建立体表传感器位置到目标位置的映射关系。
29.本领域普通技术人员可以理解,实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,该程序在执行时,包括上述实施例方法的各步骤,而所述的存储介质可以是:rom/ram、磁碟、光盘、存储卡等。因此,与本发明的方法相对应的,本发明还同时包括一种腹腔内柔性组织呼吸实时图像矫正装置,该装置通常以与方法各步骤相对应的功能模块的形式表示。如图2所示,该装置包括:
30.初始化模块,其配置来初始化影像参数,进行位姿配准及目标选取;
31.分析模块,其配置来术前运动分析,获取目标的空间位置;
32.提取模块,其配置来提取呼吸信号规律:实时跟踪目标在三维空间中的位置,同步跟踪体表传感器的空间位置,拟合出两个信号之间的映射关系;
[0033][0034]
矫正模块,其配置来呼吸运动矫正:术中利用当前时刻体表传感器的空间位置预测目标在呼吸影响下的空间位置,在每一时刻都对术前规划的静态介入路径进行矫正。
[0035]
优选地,所述初始化模块,在导航系统中跟踪体表传感器空间位置,与术前影像进行位姿配准,在二维超声影像中选取跟踪目标,当目标所处呼吸节点与术前影像最相近时记录目标空间位置p0,记录超声平面位置(θ0,r0)。
[0036]
优选地,所述分析模块,在术前影像中,以p0为中心,截取目标块b,对b进行空间采样得到若干个二维影像切片;患者自由呼吸时,在二维超声平面上进行跟踪,得到以目标为中心的局部二维超声影像u
t
,目标的空间位置p
t
,将u
t
与若干二维切片进行匹配,寻找最相似的切片,其平面位置(θ
t
,r
t
)为u
t
当前位置,计算p
t
在(θ0,r0)平面的投影点,得到当前目标的真实空间位置。
[0037]
更进一步地,所述分析模块,对b进行以p0为球心的球坐标空间采样,得到n个二维切面(θi,ri),其中i=1,2
…
,n;t时刻,在二维超声中目标空间位置为p
t
,以p
t
为中心截取包含完整目标的局部影像u
t
,将u
t
与每一个二维切面(θi,ri)进行基于局部结构性梯度的相似性度量,寻找最佳匹配切面(θ
t
,r
t
),此时p
t
为切面(θ
t
,r
t
)上的点,建立平面(θ0,r0)与平面(θ
t
,r
t
)的转换关系t
t
,将t
t
作用于p
t
即可得到当前目标的真实空间位置p
t
→0。
[0038]
优选地,所述提取模块,采用多项式拟合方式建立体表传感器位置到目标位置的映射关系。
[0039]
与现有的呼吸矫正方法相比,本发明的优点在于:
[0040]
1.只需术前采集二维超声,就可以得到目标的三维呼吸运动轨迹,能够实现空间内呼吸运动矫正。
[0041]
2.克服了术中对引导图像的依赖,建立了体表传感器与呼吸运动的映射关系,仅依赖体表传感器位置信息就可以得到目标在呼吸影响下的空间位置。
[0042]
3.可以实时校正腹腔内呼吸运动的影响,给医生呈现当前最佳的术前规划方案,满足实时性要求,而且对计算资源配置要求低,易于推广。
[0043]
4.术中不需要任何外部干预即可自动完成呼吸运动矫正,不增加医生的手术难度,不改变医生的操作习惯,具有更高的适用性和实用性。
[0044]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1