一种空间欠驱动辅助上下床机器人
1.本发明涉及机器人技术领域,具体为一种空间欠驱动辅助上下床机器人。
背景技术:
2.根据《中华老年医学杂志》显示,老年人中腰腿疼痛的发病率高达60%~80%,发生在上下床过程中的扭腰迈腿困难等问题一直困扰着老年人,而很多中年子女忙于工作无法时时陪伴在老人身边,因此需要一种能够由老年人独立操作的辅助上下床装置来帮助老年人顺利舒适地完成上下床动作;
3.但目前市场上在辅助上下床方面的器材多为辅助起身装置,并没有过多涉及到上床过程的辅助动作,会因此导致辅助起身装置对使用者起到的辅助作用不够,影响使用者的使用体验。
技术实现要素:
4.本发明提供技术方案,可以有效解决上述背景技术中提出的并没有过多涉及到上床过程的辅助动作,会因此导致辅助起身装置对使用者起到的辅助作用不够,影响使用者的使用体验的问题。
5.为实现上述目的,本发明提供如下技术方案:一种空间欠驱动辅助上下床机器人,包括机架,所述机架的一端铰接有电机托架,所述电机托架的顶端固定安装有直线电机,所述直线电机的输出轴固定安装有电机套块,所述电机套块的外侧套接有电机滑块,所述电机滑块的一端铰接有虎克铰链,所述虎克铰链的一端铰接有导向杆,所述导向杆的底端铰接有球面副,所述直线电机通过遥控器进行配合控制。
6.根据上述技术特征,所述电机滑块与直线电机之间移动配合,所述球面副与机架之间固定连接,所述电机套块的另一端与机架之间铰接。
7.根据上述技术特征,所述机架的顶端一侧固定安装有置药台,所述机架的顶端两侧位置处悬挂安装有扶手拐杖,所述置药台的顶端悬挂放置有挂式水杯,所述机架的另一端固定连接有安装架。
8.根据上述技术特征,所述扶手拐杖的顶端套接有棉套,所述扶手拐杖的顶端为凹陷弧形。
9.根据上述技术特征,所述电机滑块的顶端安装有欠驱动靠垫,所述机架的底端对称连接有高度调节杆。
10.根据上述技术特征,所述高度调节杆的底端连接有防滑垫,所述欠驱动靠垫的形状为l型。
11.与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便:
12.1、通过设置的高度调节杆、欠驱动靠垫、直线电机、电机滑块、导向杆和电机托架,可对高度调节杆的高度进行调整,以适配于不同高度的床,也可通过直线电机运行,带动电机滑块沿着直线电机上移,结合导向杆的导引作用,带动欠驱动靠垫移动至床位位置处,实
现辅助使用者上床的作用,同时欠驱动靠垫可根据被使用者的上床动作差异自动进行旋转,能够快速便捷的实现辅助上床过程中使用者姿态调整。
13.2、通过设置的扶手拐杖、置药台和挂式水杯,使用者能够借助扶手拐杖完成下床动作,也能够在机架中取出扶手拐杖,作为常规拐杖辅助行走,结合机架顶端的置药台和置药台顶端悬挂放置的挂式水杯,能够为老年人睡前喝水吃药提供便利,提高了该辅助上下床机器人对老年使用者的使用便捷性。
附图说明
14.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
15.在附图中:
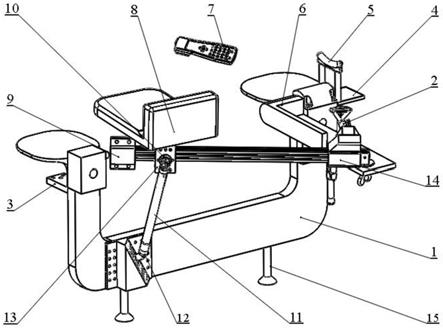
16.图1是本发明的结构示意图;
17.图2是本发明的操作示意图;
18.图中标号:1、机架;2、挂式水杯;3、安装架;4、置药台;5、扶手拐杖;6、电机托架;7、遥控器;8、欠驱动靠垫;9、电机套块;10、虎克铰链;11、导向杆;12、球面副;13、电机滑块;14、直线电机;15、高度调节杆。
具体实施方式
19.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
20.实施例:如图1
‑
2所示,本发明提供技术方案,一种空间欠驱动辅助上下床机器人,包括机架1,机架1的一端铰接有电机托架6,电机托架6的顶端固定安装有直线电机14,直线电机14的输出轴固定安装有电机套块9,电机套块9的外侧套接有电机滑块13,电机滑块13的一端铰接有虎克铰链10,虎克铰链10的一端铰接有导向杆11,导向杆11的底端铰接有球面副12,直线电机14通过遥控器7进行配合控制,电机滑块13与直线电机14之间移动配合,球面副12与机架1之间固定连接,电机套块9的另一端与机架1之间铰接,便于电机套块9产生移动时,电机套块9以与机架1接触位置为中心进行偏转。
21.机架1的顶端一侧固定安装有置药台4,机架1的顶端两侧位置处悬挂安装有扶手拐杖5,置药台4的顶端悬挂放置有挂式水杯2,机架1的另一端固定连接有安装架3,扶手拐杖5的顶端套接有棉套,扶手拐杖5的顶端为凹陷弧形,增加了使用者手部与扶手拐杖5接触时的舒适性。
22.电机滑块13的顶端安装有欠驱动靠垫8,机架1的底端对称连接有高度调节杆15,高度调节杆15的底端连接有防滑垫,欠驱动靠垫8的形状为l型,便于通过欠驱动靠垫8对使用者的腿部进行阻挡防护。
23.本发明的工作原理及使用流程:该空间欠驱动辅助上下床机器人使用时,首先旋转高度调节杆15,对高度调节杆15的高度进行调整,以适配于不同高度的床,将机架1固定安装在床边,随后使用者坐在床边,小腿靠在欠驱动靠垫8上,使用者可按动遥控器7,控制直线电机14接通电源运行,直线电机14运行会带动电机滑块13沿着直线电机14上移,结合导向杆11的导引作用,电机托架6会绕着机架1旋转,最终,电机滑块13会带动欠驱动靠垫8
移动至床位位置处,实现辅助使用者上床的作用,同时欠驱动靠垫8可根据被使用者的上床动作差异自动进行旋转,实现辅助上床过程中的姿态调整,老人完成上床动作后再次按动遥控器7,机器人复位以备再次使用;
24.在对使用者进行辅助下床时,使用者能够将手部放置在扶手拐杖5上,借助扶手拐杖5完成下床动作,也能够在机架1中取出扶手拐杖5,作为常规拐杖辅助行走,结合机架1顶端的置药台4和置药台4顶端悬挂放置的挂式水杯2,能够为老年人睡前喝水吃药提供便利。
25.最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1