多自由度按摩头及按摩机器人的制作方法
1.本实用新型涉及按摩器械技术领域,特别涉及一种多自由度按摩头及按摩机器人。
背景技术:
2.现如今,因工作节奏的加快以及工作压力的增大,使得人们的身体长期处于疲劳状态,对生活质量造成严重影响。与此同时,按摩机器人技术快速发展,人们通过按摩机器人按摩身体,可缓解疲劳、放松身心、改善血液循环、加速人体新陈代谢,以达到增强免疫力、保健养生的目的。
3.按摩头作为按摩机器人的基础部件,其设计的好坏深深影响着按摩机器人的工作性能。在按摩机器人中,按摩头位于操作末端且通过机械臂驱动,贴合人体皮肤按照一定轨迹移动按摩。
4.然而,现有的按摩头通常为固定设计,移动按摩时不能很好的适应人体外形的轮廓变化,存在按摩盲区,按摩效果不佳,并且因结构的较强刚性,按摩时不能很好的进行缓冲及保护,容易对人体造成碰撞、压迫等伤害,从而降低用户体验。
技术实现要素:
5.本实用新型的主要目的是提出一种多自由度按摩头,旨在解决现有按摩头的结构设计存在按摩效果不佳且安全性不高的问题。
6.为实现上述目的,本实用新型提出一种多自由度按摩头,该多自由度按摩头包括相对设置的第一安装座和第二安装座,所述第二安装座的底部设置有若干个触头,所述第一安装座和第二安装座之间设置有若干可弯曲的伸缩体,所述伸缩体具有空腔和可供气体进入、抽出所述空腔的开口,所述伸缩体的开口端与所述第一安装座连接,所述伸缩体的密封端与所述第二安装座连接。
7.优选地,若干个所述触头均为射频触头,且沿所述第二安装座的周向布置。
8.优选地,所述第一安装座和第二安装座设置为中间高、周边低的环形结构,所述伸缩体为倾斜设置。
9.优选地,所述伸缩体包括两间隔设置的安装部和位于两所述安装部之间的波纹管,两所述安装部分别与所述第一安装座和第二安装座连接,其中一个所述安装部上设置有所述开口;所述波纹管的两端分别固定在两所述安装部上,所述波纹管与两所述安装部围合形成所述空腔。
10.优选地,所述第一安装座和第二安装座上对应设置有可供两所述安装部穿过的通孔,所述安装部与通孔之间形成卡接配合。
11.优选地,所述波纹管包括多个伸缩节,所述多自由度气控关节还包括两个设置在所述第一安装座和第二安装座之间的固定座,所述固定座具有卡持所述伸缩节的环形卡槽。
12.优选地,所述固定座包括两个卡接配合的半环形块。
13.优选地,所述多自由度按摩头还包括气泵,所述气泵通过气管与所述开口连接,所述气管上设有电磁阀。
14.优选地,所述第一安装座包括安装板和罩设在所述安装板上的外壳,所述外壳的一侧设有供所述气管穿过的缺口,所述外壳上设置有安装块。
15.本实用新型还公开一种按摩机器人,该按摩机器人包括多自由度按摩头,所述多自由度按摩头包括相对设置的第一安装座和第二安装座,所述第二安装座的底部设置有若干个触头,所述第一安装座和第二安装座之间设置有若干可弯曲的伸缩体,所述伸缩体具有空腔和可供气体进入、抽出所述空腔的开口,所述伸缩体的开口端与所述第一安装座连接,所述伸缩体的密封端与所述第二安装座连接。
16.本实用新型技术方案的有益效果在于:本多自由度按摩头中,通过从伸缩体的开口向空腔输气或从空腔抽气,以控制伸缩体进行伸缩弯曲动作,并通过若干个伸缩体的配合,实现对第二安装座及其上触头的偏转驱动。与目前按摩头的固定设计相比,本多自由度按摩头可实现多方向角度的偏转按摩,转动角度范围大,可适应人体外形的轮廓变化,几乎无按摩盲区,按摩效果好;并且,采用气控的驱动设置,具有驱动柔性,与人体接触按摩可进行受力缓冲,从而降低伤害人体的风险,提高使用安全性,提升用户体验。
附图说明
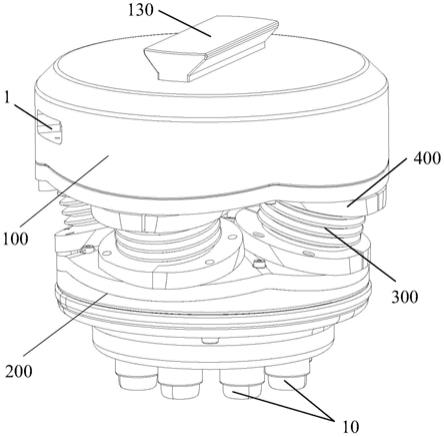
17.图1为本实用新型一实施例中多自由度按摩头的结构示意图;
18.图2为图1中多自由度按摩头的爆炸结构示意图;
19.图3为图1中多自由度按摩头的固定座的结构示意图;
20.图4为图1中多自由度按摩头的电气连接示意图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本实用新型中的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.本实用新型提出一种多自由度按摩头,参照图1,该多自由度按摩头包括相对设置的第一安装座100和第二安装座200,第二安装座200的底部设置有若干个触头10,第一安装座100和第二安装座200之间设置有若干可弯曲的伸缩体300,伸缩体300具有空腔和可供气体进入、抽出空腔的开口,伸缩体300的开口端与第一安装座100连接,伸缩体300的密封端与第二安装座200连接。
23.本实施例的多自由度按摩头可用于人体按摩,其包括第一安装座100、第二安装座200、若干个触头10和若干个伸缩体300,具体的,第一安装座100、伸缩体300、第二安装座200和触头10从上之下依次设置,其中:
24.第一安装座100作为结构基础,用于安装本按摩头其它结构及实现本按摩头在机械臂或其他机构上的连接固定;第二安装座200位于第一安装座100的下方,其用于安装触头10;若干个触头10设置在安装座的底部,其可采用螺丝安装。参照图1,第一安装座100和
第二安装座200均采用圆盘结构,触头10为圆柱形结构,可节省安装空间。
25.伸缩体300位于第一安装座100和第二安装座200之间,若干个伸缩体300可绕一虚拟的中心轴周向布置。即该中心轴位于若干个伸缩体300的中心位置处,以表示若干个伸缩体300具有一个设置中心,基于上述结构,该中心轴可为第一安装座100和第二安装座200的圆心连线。作为较优设置,参照图1,伸缩体300采用四个,但不仅限于四个,还可为三个或五个不等,其根据工作要求和实际情况设置。其中,伸缩体300呈长条形且具有开口端和密封端,其两端分别与第一安装座100和第二安装座200连接,可采用胶粘或其它的方式固定;伸缩体300内设空腔,开口即设于开口端,其可采用柔性材质制成,比如橡胶。可理解的是,从开口处往伸缩体300的空腔内输气或从伸缩体300的空腔内抽气,则可使得伸缩体300沿其长度方向伸长或缩短。
26.其中,作为较优设置,可采用气泵实现输气和抽气,气泵通过气管连接伸缩体300的开口以与其内腔连通,每一个伸缩体300均可单独配置气泵,也可通过气泵统一控制,具体设置需根据实际情况而定。
27.本多自由度按摩头从伸缩体300的开口向空腔输气或抽气,以控制伸缩体300进行伸缩弯曲动作,并通过若干个伸缩体300的配合,实现对于第二安装座200及触头10的偏转驱动。即让若干个伸缩体300中的某一个或某几个伸长弯曲,另外的几个缩短弯曲,可使第二安装座200及触头10朝某一个方向转动,以及通过控制伸缩体300的伸缩距离和弯曲程度,可使第二安装座200及触头10朝该方向转动某一个角度。
28.与目前按摩头的固定设计相比,本多自由度按摩头可实现多方向角度的偏转按摩,转动角度范围大,可适应人体外形的轮廓变化,几乎无按摩盲区,按摩效果好;并且,采用气控的驱动设置,具有驱动柔性,与人体接触按摩可进行受力缓冲,从而降低损害人体的风险,提高使用安全性,提升用户体验。
29.在一较佳实施例中,参照图1和图2,若干个触头10均为射频触头,且沿第二安装座200的周向布置。即触头10可对人体进行射频按摩,其内设有射频发生器,在触头10接触人体时,射频发生器发射的射频波可穿透人体皮肤,进入皮下组织并作用到胶原内的水分子使其极性改变,高频水分子震动旋转摩擦生热,以刺激胶原收紧重塑,修复老化受损的胶原层。
30.作为较优选择,射频发生器可由多对电极片组成,以实现多级射频,有效且安全。本实施例中,触头10其能够在表皮温度不超过42℃的情况下,通过射频将穴位下靶向组织升温到44℃~46℃,以热疗的方式持续按摩若干分钟,可促进按摩部位乃至全身的血液循环,促进机体新陈代谢,提高免疫力,同时还可降低细菌或病毒活性,以起到辅助治疗、延缓疾病进程的的作用。本触头10可进行多级射频和3d穿透加热,达到中医理疗效果,并且触头10可以拨动肌肉,能为用户带来更好的理疗按摩体验。
31.另外,若干个触头10沿第二安装座200的周向布置,以构造成按摩头的圆形按摩部,可实现对人体由点到面的区域性按摩,均匀加热,按摩效果好,且可进一步提升用户体验。
32.在一较佳实施例中,参照图2,第一安装座100和第二安装座200设置为中间高、周边低的环形结构,伸缩体300为倾斜设置。伸缩体300连接于第一安装座100和第二安装座200的周边,各伸缩体300的开口端相对其设置中心向外扩张,密封端朝向设置中心靠拢,以
形成伸缩体300的倾斜设置。通过此设置,可使第二安装座200受力更加集中,以及进一步扩大第二安装座200的偏转角度及转动范围,提高本气控关节的工作性能。
33.其中,伸缩体300的倾斜角度根据实际情况设置,在此不作具体限定。另外,为顺应伸缩体300的倾斜设置,第一安装座100和第二安装座200设置为中间高、周边低的环形结构,即对应采用倾斜的构造设置,可使结构紧凑,提高伸缩体300的安装稳定性。
34.在一较佳实施例中,参照图2,伸缩体300包括两间隔设置的安装部310和位于两安装部310之间的波纹管320,两安装部310分别与第一安装座100和第二安装座200连接,其中一个安装部310上设置有开口;波纹管320的两端分别固定在两安装部310上,波纹管320与两安装部310围合形成空腔。
35.具体地,伸缩体300的结构组成依次为安装部310、波纹管320和安装部310,整体呈长条状,波纹管320位于伸缩体300的中部位置,其与两安装部310一体成型且围合形成空腔,两安装部310位于波纹管320的两端位置,以分别与第一安装座100和第二安装座200连接,开口则位于伸缩体300第一安装座100连接的安装部310上。
36.在一较佳实施例中,参照图2,第一安装座100和第二安装座200上对应设置有可供两安装部310穿过的通孔,安装部310与通孔之间形成卡接配合。两安装部310呈圆柱形结构,第一安装座100和第二安装座200上所设通孔为圆形且与安装部310相适配,通孔的内径大小与安装部310的外径大小一致,伸缩体300的两安装部310分别插装第一安装座100和第二安装座200的通孔内以形成卡接配合,实现稳固连接,结构简单,装配方便。
37.在一较佳实施例中,参照图1和图2,波纹管320包括多个伸缩节,多自由度气控关节还包括两个设置在第一安装座100和第二安装座200之间的固定座400,固定座400具有卡持伸缩节的环形卡槽。具体地,多个伸缩节沿波纹管320的长度方向排列,伸缩体300的内腔被抽气或输气,伸缩节则层层折叠或层层分开,具有良好的伸缩性能。每一个伸缩体300对应设置两个固定座400,且分别安装在第一安装座100和第二安装座200上,靠近伸缩体300的开口端和密封端。固定座400为环形结构,位于伸缩体300的外侧,以通过其内的环形卡槽卡持伸缩节,实现伸缩体300的安装定位,且对伸缩体300具有加固作用。另外,通过两固定座400的设置,在伸缩体300缩短时,可避免第一安装座100和第二安装座200的直接碰撞,延长使用寿命。其中,固定座400可采用螺丝安装。
38.进一步地,参照图3,固定座400包括两个卡接配合的半环形块410。两个半环形块410的两端对应相接以组成固定座400,且围绕伸缩体300设置,固定座400的内径大小与伸缩体300轮廓大小一致。固定座400采用两半环形块410的结构形式,拆装简单方便。
39.两个半环形块410上对应设置有燕尾槽20和楔形块30。燕尾槽20和楔形块30分别位于半环形块410的两端位置处,燕尾槽20和楔形块30相适配且可插装,两个半环形块410以通过燕尾槽20和楔形块30实现卡接配合,固定座400设置稳固。
40.在一较佳实施例中,多自由度按摩头还包括气泵,气泵通过气管与开口连接,气管上设有电磁阀。参照图4,气泵包括输气泵和吸气泵,均通过气管与开口连接,以连通伸缩体300的内腔,分别用于内腔的进气和抽气。所设电磁阀用于控制气管内气体流量大小,以实现对伸缩体300伸缩弯曲动作的精准控制。作为较优设置,参照图2,伸缩体300的开口处可设置三向气管接头40,三向气管接头40的一端与伸缩体300的内腔连通,另外两端分别通过气管连接输气泵和吸气泵。另外,本多自由度按摩头还可设置控制器,该控制器与气泵电性
连接,以用于控制气泵对空腔进行进气和抽气。该控制器可包括方向操作器,通过操纵方向操作器上的操作杆,即可使得第二安装座200及触头10朝某个方向转动,操作简单,控制方便。
41.在一较佳实施例中,参照图1和图2,第一安装座100包括安装板110和罩设在安装板110上的外壳120,外壳120的一侧设有供气管穿过的缺口1,外壳120上设置有安装块130。具体地,安装板110与外壳120围合形成安装空间以用于容置气管等部件,外壳120对其具有保护作用,安装板110与外壳120采用螺丝连接。所设缺口1贯穿外壳120两面,以供各伸缩体300连接的气管统一穿出,结构紧凑,集成程度高。
42.所设安装块130位于外壳120的顶部,可与外壳120一体成型或可拆卸设置,本多自由度按摩头通过该安装块130安装于机器上,该安装块130的横截面为倒梯形,机器上设置与安装块130相适配的倒梯形插槽,通过将安装块130插装至倒梯形插槽内,可实现多自由度按摩头在机器上的稳固安装。其中,该机器可为机械手或其它。本实施例中,外壳120上安装块130的设置,可实现按摩头的快速拆装,减少人工及时间成本支出。
43.本实用新型进一步提出的一种按摩机器人包括按摩头,该按摩头为以上实施例所提出的多自由度按摩头,多自由度按摩头的具体结构参照上述实施例,由于本按摩机器人采用了上述所有实施例的所有技术方案,因此至少具有上述实施例的技术方案所带来的全部技术效果,在此不再一一赘述。
44.以上的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1