智能型艾灸机械手
1.本实用新型涉及一种中医理疗方面的艾灸装置,具体地说是一种智能型艾灸机械手。
背景技术:
2.当前祖国传统医学取得巨大发展,使得艾灸疗法得以复兴与繁荣,在教学、医疗及科研等方面都取得了很大成就。广大中医药科技工作者对艾灸疗法的机理研究,艾灸疗法对人体生理、病理的影响研究等方面取得了很大进展,为艾灸疗法的发展开拓了美好的前景。艾灸疗法已逐渐成为养生治病、保健康复、治未病等的常用养生保健法之一。艾灸通过艾火的热力渗透肌肤,依靠艾火的温热作用刺激人体的一些特定部位,如经络腧穴等部位,以达到防治疾病的目的,具有温经散寒、活血止痛和防病保健的作用。
3.目前,关于艾灸方法大多采用传统“悬起灸”进行操作治疗,而传统“悬起灸”需要手持进行操作,施灸过程中需要随时询问患者感受以便调整距离,谨防温度过高引起烫伤;艾条在燃烧过程中产生的艾灰如不及时清理极易引起脱落而造成患者烫伤,这些都增加了患者和医护人员的心理负担。同时,“悬起灸”在操作过程中需要医护人员一直手持进行,医护人员不能进行其他工作,操作费时,降低了医护人员的工作效率。为了解决以上问题,可借助艾灸盒等工具施灸,又出现了多种多样的装置,如红外线理疗灯等,用于解决施灸过程中的难点,但其他工具的应用仍然不能满足对各可施灸部位进行艾灸操作,红外线理疗灯等的应用失去了艾叶本身的中草药功效,缩小了艾灸的适用范围,降低了艾灸的功效;同时目前没有出现能清除艾灰、防止烫伤、施行“悬起灸”手法的智能一体化装置。
技术实现要素:
4.本实用新型是针对背景技术中提及的技术缺陷,提供一种可替代人工操作、实时调整施灸位置的智能型艾灸机械手。
5.本实用新型采用的技术方案是:一种智能型艾灸机械手,包括智能控制机构和机械手机构,所述机械手机构包括壳体、电机、上下运动组件、摆动组件;
6.壳体为下部开放的筒体结构,电机安装在壳体外侧顶部;壳体底部设置有镂空支撑板;
7.上下运动组件包括丝杆、螺母、安装板;丝杆通过联轴器与所述电机的输出端连接传动,螺母套装在丝杆上,丝杆穿过安装板,安装板固接在螺母底部,安装板侧面固接有一水平设置的定位针,艾条插装于定位针上;
8.摆动组件包括定位针摆动组件和挡板摆动组件;
9.定位针摆动组件包括第一舵机、齿轮组和定位针;齿轮组安装在安装板侧面,其中主动轮与第一舵机的输出端连接,从动轮套装在所述定位针上;
10.挡板摆动组件包括第二舵机、挡板;第二舵机通过连接件安装在壳体内部一侧,其输出端通过连接轴与竖向设置的挡板连接,挡板随之摆动;
11.所述智能控制机构包括传感器、控制器;
12.传感器安装在壳体底部支撑板上,控制器包括主控模块、以及均与所述主控模块连接的供电模块、显示模块和按键模块;主控模块分别与所述电机、第一舵机、第二舵机、传感器连接。
13.所述传感器为超声波测距传感器。
14.作为优选的技术方案:还包括储灰网;所述储灰网设置在所述壳体的底部,沿壳体圆周设置,是一截面为u型结构的网体。
15.作为优选的技术方案:所述定位针的自由端与所述挡板的外侧边相交。
16.作为优选的技术方案:所述丝杆的底部插装于安装在壳体底部支撑板上的轴承内。
17.与现有技术相比,本实用新型结构简单,能够实现全方位定位灸治,适用于各处可灸治部位,代替人工操作,可施雀啄灸、回旋灸和温和灸等“悬起灸”手法,有效避免艾灰脱落烫伤;患者可自行调节施灸距离,既提高了安全性又增加了患者的舒适性;同时还可提高医护人员的工作效率,提高临床使用效果。
附图说明
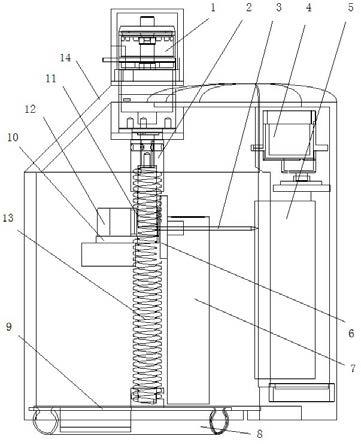
18.图1为本实用新型的主视图。
19.图2为本实用新型的侧视图。
20.图3为本实用新型的局部放大图。
21.图4为本实用新型中智能控制机构的连接框图。
22.图中:电机1,联轴器2,定位针3,第二舵机4,挡板5,齿轮组6,艾条7,储灰网8,支撑板9,安装板10,螺母11,第一舵机12,丝杆13,壳体14,传感器15。
具体实施方式
23.下面结合附图和实施例对本实用新型做进一步说明。
24.参见附图1
‑
4,本实用新型所公开的这种艾灸装置为智能型艾灸机械手。
25.这种智能型艾灸机械手,包括智能控制机构和机械手机构。
26.机械手机构包括壳体14、电机1、上下运动组件、摆动组件。
27.壳体为下部开放的筒体结构,电机1安装在壳体外侧顶部;壳体底部设置有镂空支撑板9。电机输出端向下伸入壳体内。
28.作为优选的一个实施例,储灰网设置在壳体的底部,沿壳体圆周设置,是一截面为u型结构的网体。
29.上下运动组件包括丝杆13、螺母11、安装板10。丝杆13通过联轴器2与电机的输出端连接传动,螺母11套装在丝杆13上,丝杆13穿过安装板10上的孔,安装板固接在螺母11底部,安装板侧面固接有一水平设置的定位针3,艾条7插装于定位针上。螺母与丝杆之间为活动连接结构,电机带动丝杆转动,从而实现螺母在丝杆上实现上下运送,螺母带动安装板上下移动,实现艾条上下移动。丝杆的底部插装于安装在壳体底部支撑板上的轴承内。
30.摆动组件包括定位针摆动组件和挡板摆动组件。
31.定位针摆动组件包括第一舵机12、齿轮组6和定位针3。齿轮组包括主动轮和从动
轮,齿轮组整体安装在安装板侧面,其中主动轮与第一舵机的输出端连接,从动轮套装在定位针上;第一舵机12安装在安装板上,第一舵机和齿轮组随安装板上下移动,作为优选的方案,安装板下面还装有减速器,减速器与第一舵机连接控制。
32.挡板摆动组件包括第二舵机4、挡板5;第二舵机通过连接件安装在壳体内部一侧,其输出端通过连接轴与竖向设置的挡板连接,挡板随之摆动。连接轴的底部插装于安装在壳体底部支撑板上的轴承内。
33.定位针的自由端与所述挡板的外侧边相交。定位针的自由端左右摆动时会碰到挡板外侧边缘。
34.智能控制机构包括传感器、控制器;传感器安装在壳体底部支撑板上,控制器包括主控模块、以及均与所述主控模块连接的供电模块、显示模块和按键模块;主控模块分别与所述电机、第一舵机、第二舵机、传感器连接。传感器最好选用超声波测距传感器。控制器可以安装在壳体外部,也可以是独立的遥控结构。
35.本实用新型所公开的这种智能艾灸机械手可通过安装在底部的超声波测距传感器,将距离数据传输到主控模块,实时监测艾灸仪距离患者皮肤的距离。当距离过近时,主控模块中断当前进行的艾灸,控制电机自动远离患者,以达到防烫伤的功能。另外,艾灸师可通过配套的控制器,根据不同艾灸手法、不同患者设置精确到分钟的艾灸时间设置,智能艾灸机械手根据设置的时长进行艾灸。
36.除灰过程:当艾灸开始时间达到固定除灰时长时,艾灸机械手会控制第一舵机转动,齿轮组的转动带动艾条圆周摆动,当艾条摆动后撞击壳体产生震动,使艾灰滴落到底部的储灰网中。作为优选的方案,最下面有一圈网子用于收集艾灰。储灰网内圈用硬度足够大的金属起到固定网子形状的作用。外圈用韧性足够大的金属,从而达到他在受到挤压的时候可以进入定位槽中,进入后恢复原状。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1