一种下肢助残外骨骼机器人
1.本实用新型属于外骨骼机器人技术领域,具体涉及一种下肢助残外骨骼机器人。
背景技术:
2.近年来,由于中风、脊椎损伤以及老龄化人口等逐年增多,用于老年人或下肢有行动障碍的人群的外骨骼机器人得到了应用和广泛推广,这些外骨骼机器人佩戴在下肢行动障碍人群的身上进行康复训练。传统的康复训练护士、家属对患者进行反复牵引,工作量大,且需要巨大的人力、效率低下。
3.而目前市场上出现的外骨骼机器人的关节驱动多为盘型电机驱动,其产生的力矩能带动腿的运动,很难平衡人体重心产生的力矩,所以穿戴外骨骼机器人需要拄拐才能稳定行走。穿戴外骨骼机器人需要用柔性绑带将人体大腿和小腿与外骨骼机器人固定,使人体关节与外骨骼机器人关节对应;由于人体自身重量,长时间穿戴会导致对应的关节错位,而柔性绑带绑的太紧会影响人体下肢血液的流动,对患者造成二次伤害。
技术实现要素:
4.本实用新型的目的是克服现有技术中存在的穿戴外骨骼机器人需要拄拐才能稳定行走、长时间穿戴会导致对应的关节错位的缺陷,提供了一种无需支撑或单手支撑且能够独立稳定行走的下肢助残外骨骼机器人。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种下肢助残外骨骼机器人,包括设置在患者上身躯干上的束缚组件、安装在所述束缚组件上的臀部组件以及对称安装在所述臀部组件上的下肢康复机构和腿部支撑机构;所述臀部组件包括臀部支架、安装在所述臀部支架上的臀部连接件以及安装在所述臀部支架和所述臀部连接件上的胯下支撑垫;
7.所述下肢康复机构包括依次连接的髋关节组件、大腿训练组件、小腿训练组件以及足部组件;
8.所述髋关节组件包括髋关节支架和通过限位器安装在所述髋关节支架上的至少一个髋关节液压缸;所述髋关节液压缸的输出端转动连接在所述臀部支架上;
9.所述大腿训练组件包括固定端连接在所述髋关节支架上的大腿前液压缸和大腿后液压缸以及固定安装在所述髋关节支架上的大腿主支撑机构;所述大腿主支撑机构对称转动连接有第一大腿辅支撑杆和第二大腿辅支撑杆,所述第一大腿辅支撑杆和第二大腿辅支撑杆转动连接;所述大腿前液压缸的输出端转动连接在一个第一大腿辅支撑杆的转角上,所述大腿后液压缸的输出端转动连接在另一个所述第一大腿辅支撑杆的转角上;
10.所述小腿训练组件包括通过连接块转动连接在所述大腿主支撑机构上的小腿主支撑机构、安装在所述小腿主支撑机构上部的护腿以及转动安装在所述小腿主支撑机构上的第一小腿辅支撑杆和第二小腿辅支撑杆;所述第一小腿辅支撑杆与所述第二小腿辅支撑杆转动连接;所述护腿上安装有大腿调节液压缸、足前液压缸以及足后液压缸,所述大腿调
节液压缸的输出端转动连接在所述第二大腿辅支撑杆的转角上;所述足前液压缸和足后液压缸均通过万向节安装在足底上;
11.所述足部组件包括足底、安装在所述足底上的跟关节支撑柱以及安装在所述跟关节支撑柱的跟关节调节件;所述小腿主支撑机构的下端通过万向节与所述跟关节调节件转动连接。
12.进一步地,所述腿部支撑机构包括固定端通过护腿连接件安装在所述护腿上的支撑液压缸和与所述支撑液压缸的输出端连接的胯下支座;患者穿戴时,所述胯下支座与所述胯下支撑垫接触。
13.进一步地,所述束缚组件包括肩背板、安装在所述肩背板上的菱形脊柱支撑件、对称安装在所述肩背板上的腋下支撑以及安装在所述菱形脊柱支撑件上的脊柱调节件;所述脊柱调节件与所述臀部连接件固定连接;所述腋下支撑转动安装有腰侧支撑杆,所述腰侧支撑杆通过腰侧连接件安装在所述臀部支架上;所述菱形脊柱支撑件的两个侧角与所述肩背板之间均连接有后胸绑带,所述臀部连接件与所述肩背板之间安装有至少两根后背绑带;所述菱形脊柱支撑件上安装有胸部绑带,所述脊柱调节件上设置有腰部绑带。
14.进一步地,所述脊柱调节件包括安装在所述臀部连接件上的脊柱固定板和固定安装在所述菱形脊柱支撑件上的脊柱调节板;所述脊柱调节板远离所述菱形脊柱支撑件的一端穿设在所述脊柱固定板内,所述脊柱固定板上设置有用于螺钉紧定调节的调节孔。
15.进一步地,所述臀部连接件包括固定连接在所述臀部支架上的第一臀部连接板和第二臀部连接板;所述第一臀部连接板和第二臀部连接板均穿设在臀部连接块上,所述臀部连接块上开设有用于螺钉紧定调节的多个调节孔。
16.进一步地,所述足底上还安装有与所述足前液压缸的固定端转动连接的足前支撑柱和与足后液压缸的固定端转动连接的足后支撑柱。
17.进一步地,所述大腿主支撑机构包括转动安装在所述髋关节支架上的大腿上支撑杆和套设在所述大腿上支撑杆内的大腿下支撑杆;所述大腿上支撑杆和大腿下支撑杆上均设置有用于调节高度的调节孔;所述第一大腿辅支撑杆的上端与所述大腿上支撑杆转动连接,所述第二大腿辅支撑杆的下端与所述大腿下支撑杆转动连接。
18.进一步地,所述小腿主支撑机构包括转动连接在所述护腿上的小腿上支撑杆和套设在所述小腿上支撑杆内的小腿下支撑杆;所述小腿上支撑杆和小腿下支撑杆上均设置有用于调节高度的调节孔;所述第二小腿辅支撑杆的下端与所述小腿下支撑杆转动连接。
19.更进一步地,所述跟关节调节件上开设有用于螺钉紧定调节的调节孔。
20.本实用新型的一种下肢助残外骨骼机器人的有益效果是:
21.1、本实用新型的髋关节组件、大腿训练组件、小腿训练组件以及足部组件采用并联机构,在大腿训练组件的内侧设置有腿部支撑机构,能够实现在行走时穿戴者无需拄拐或单手拄拐即可独立行走,避免患者长时间穿戴而导致患者对应的关节错位。本实用新型的各活动关节与人体各关节相对应,各主要关节部位都有角度限制,且其驱动力较大,避免了外骨骼机器人关节过于灵活导致整体稳定性较差的现象。
22.2、本实用新型的大腿训练组件和小腿训练组件中设置了可调节的主支撑机构,能够实现不同身高穿戴者的康复训练,且多部位采用高弹性绑带,裆部设置有胯下支撑垫,提高了穿戴者的舒适度以及人机的协调性。在腰部、髋关节以及足底均设有传感器和编码器,
进行信息的采集和处理,方便了解穿戴者的身体情况,并规划出适合穿戴者的步态。
附图说明
23.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
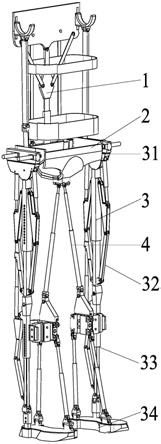
24.图1是本实用新型实施例的前视立体图;
25.图2是本实用新型实施例的后视立体图;
26.图3是本实用新型实施例的下肢康复机构的结构示意图;
27.图4是本实用新型实施例的束缚组件的前视立体图;
28.图5是本实用新型实施例的束缚组件的后视立体图;
29.图6是本实用新型实施例的臀部组件的结构示意图;
30.图7是本实用新型实施例的髋关节组件的结构示意图;
31.图8是本实用新型实施例的大腿训练组件的结构示意图;
32.图9是本实用新型实施例的小腿训练组件的结构示意图;
33.图10是本实用新型实施例的足部组件的结构示意图。
34.图中:1、束缚组件,11、肩背板,12、菱形脊柱支撑件,13、腋下支撑,14、脊柱调节件,141、脊柱固定板,142、脊柱调节板,15、腰侧支撑杆,16、腰侧连接件,17、后胸绑带,18、后背绑带,19、胸部绑带,110、腰部绑带,2、臀部组件,21、臀部支架,22、臀部连接件,221、第一臀部连接板,222、第二臀部连接板,223、臀部连接块,23、胯下支撑垫,3、下肢康复机构,31、髋关节组件,311、髋关节支架,312、限位器,313、髋关节液压缸,32、大腿训练组件,321、大腿前液压缸,322、大腿后液压缸,323、大腿主支撑机构,3231、大腿上支撑杆, 3232、大腿下支撑杆,324、第一大腿辅支撑杆,325、第二大腿辅支撑杆,326、大腿调节液压缸,33、小腿训练组件,331、连接块,332、足前液压缸,333、足后液压缸,334、小腿主支撑机构,3341、小腿上支撑杆,3342、小腿下支撑杆,335、护腿, 336、第一小腿辅支撑杆,337、第二小腿辅支撑杆,34、足部组件,341、足底,342、跟关节支撑柱,343、跟关节调节件,344、足前支撑柱,345、足后支撑柱,4、腿部支撑机构,41、护腿连接件,42、胯下支座,43,支撑液压缸。
具体实施方式
35.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
36.如图1
‑
图10所示的本实用新型的一种下肢助残外骨骼机器人的具体实施例,包括设置在患者上身躯干上的束缚组件1、安装在束缚组件1上的臀部组件2以及对称安装在臀部组件2上的下肢康复机构3和腿部支撑机构4;臀部组件2包括臀部支架21、安装在臀部支架21上的臀部连接件22以及安装在臀部支架21 和臀部连接件22上的胯下支撑垫23;下肢康复机构3包括依次连接的髋关节组件31、大腿训练组件32、小腿训练组件33以及足部组件34。本实用新型实施例的髋关节组件31包括髋关节支架311和通过限位器312安装在髋关节支架311上的至少一个髋关节液压缸313;髋关节液压缸313的输出端转动连接在臀部支架21上。通过系统给定的步态和行走过程适应性来控制髋关节液压缸313控制腿部的外展内收和旋外旋内两个动作。其中如图6和图7所示臀部连接件22包括固定连接在臀部支架 21上的第一臀部连接板221和第二臀部连接板222;第一臀部连接板221和第二臀部连接板222
均穿设在臀部连接块223上,臀部连接块223上开设有用于螺钉紧定调节的多个调节孔,通过调节第一臀部连接板221和第二臀部连接板222穿设在臀部连接块223内的长度,来根据患者的臀部大小、腰围大小,进行调节。
37.参照图3和图8所示,大腿训练组件32包括固定端连接在髋关节支架311上的大腿前液压缸321和大腿后液压缸322以及固定安装在髋关节支架311上的大腿主支撑机构323;大腿主支撑机构323对称转动连接有第一大腿辅支撑杆324和第二大腿辅支撑杆325,第一大腿辅支撑杆324和第二大腿辅支撑杆 325转动连接;大腿前液压缸321的输出端转动连接在一个第一大腿辅支撑杆324的转角上,大腿后液压缸322的输出端转动连接在另一个第一大腿辅支撑杆324的转角上;控制大腿前液压缸321和大腿后液压缸322来控制大腿屈和伸动作。
38.参照图9,小腿训练组件33包括通过连接块331转动连接在大腿主支撑机构323上的小腿主支撑机构334、安装在小腿主支撑机构334上部的护腿335以及转动安装在小腿主支撑机构 334上的第一小腿辅支撑杆336和第二小腿辅支撑杆337;第一小腿辅支撑杆336与第二小腿辅支撑杆337转动连接;护腿335 上安装有大腿调节液压缸326、足前液压缸332以及足后液压缸 333,大腿调节液压缸326的输出端转动连接在第二大腿辅支撑杆325的转角上;足前液压缸332和足后液压缸333均通过万向节安装在足底341上。其中小腿主支撑机构334包括转动连接在护腿335上的小腿上支撑杆3341和套设在小腿上支撑杆 3341内的小腿下支撑杆3342;小腿上支撑杆3341和小腿下支撑杆3342上均设置有用于调节高度的调节孔;第二小腿辅支撑杆337的下端与小腿下支撑杆3342转动连接。控制足前液压缸 332和足后液压缸333控制踝关节的内翻外翻和跖屈背屈动作。
39.如图10所示,足部组件34包括足底341、安装在足底341 上的跟关节支撑柱342以及安装在跟关节支撑柱342的跟关节调节件343;小腿主支撑机构334的下端通过万向节与跟关节调节件343转动连接。其中跟关节调节件343上开设有用于螺钉紧定调节的调节孔,用于调节小腿主支撑机构334与足底341 之间的位置距离。
40.参照图4和图5,束缚组件1包括肩背板11、安装在肩背板11上的菱形脊柱支撑件12、对称安装在肩背板11上的腋下支撑13以及安装在菱形脊柱支撑件12上的脊柱调节件14;脊柱调节件14与臀部连接件22固定连接;腋下支撑13转动安装有腰侧支撑杆15,腰侧支撑杆15通过腰侧连接件16安装在臀部支架21上;菱形脊柱支撑件12的两个侧角与肩背板11之间均连接有后胸绑带17,臀部连接件22与肩背板11之间安装有至少两根后背绑带18;菱形脊柱支撑件12上安装有用于固定患者的胸部绑带19,脊柱调节件14上设置有用于固定患者的腰部绑带110。其中的绑带均为高弹性绑带,不会因固定过紧,而给患者带来二次伤害,本实用新型实施例中多部位采用高弹性的绑带,裆部设置有胯下支撑垫23,提高了穿戴者的舒适度以及人机的协调性。
41.本实用新型实施例的脊柱调节件14包括安装在臀部连接件 22上的脊柱固定板141和固定安装在菱形脊柱支撑件12上的脊柱调节板142;脊柱调节板142远离菱形脊柱支撑件12的一端穿设在脊柱固定板141内,脊柱固定板141上设置有用于螺钉紧定调节的调节孔,通过调节脊柱调节板142在脊柱固定板 141内的距离,来调节脊柱调节件14的高度,以适用不同脊柱高度的患者。
42.腿部支撑机构4包括固定端通过护腿连接件41安装在护腿 335上的支撑液压缸43
和与支撑液压缸43的输出端连接的胯下支座42;患者穿戴时,胯下支座42与胯下支撑垫23接触。在本实用新型机器人的左右两个下肢康复机构3上均安装有腿部支撑机构4,能够有效避免患者长时间穿戴而造成的关节错位问题。
43.将人体上身腋下放在腋下支撑13上,通过腰部绑带110和胸部绑带19将人体上身紧固在束缚组件1上。通过调节臀部连接件22 上的第一臀部连接板221和第二臀部连接板222穿设在臀部连接块223内的长度,以适合人体穿戴,人体坐在胯下支撑垫23上,调节支撑液压缸43的长度使胯下支座42与胯下支撑垫23接触。调节大腿上支撑杆3231和大腿下支撑杆3232以及小腿上支撑杆3241 和小腿下支撑杆3242之间的长度,使其与穿戴者下肢的长度一致。通过系统给定的步态和行走过程适应性来控制髋关节液压缸313控制腿部的外展内收和旋外旋内两个动作,控制大腿前液压缸321和大腿后液压缸322控制大腿屈和伸动作,控制足前液压缸332和足后液压缸333控制踝关节的内翻外翻和跖屈背屈动作。本实用新型的下肢助残外骨骼机器人在各个关节处的调节下,本实用新型的大腿训练组件32和小腿训练组件33中设置了可调节的主支撑机构能够适用于身高为155cm
‑
185cm的人群。
44.本实用新型的髋关节组件31、大腿训练组件32、小腿训练组件33以及足部组件34采用并联机构,在大腿训练组件32的内侧设置有腿部支撑机构4,能够实现在行走时穿戴者可无需拄拐或单手拄拐即可独立行走,避免患者长时间穿戴而导致患者对应的关节错位。本实用新型的各活动关节与人体各关节相对应,各主要关节部位都有角度限制,且其驱动力较大,避免了外骨骼机器人关节过于灵活导致整体稳定性较差的现象。本实用新型实施例中在腰部、髋关节以及足底均设有传感器和编码器,进行信息的采集和处理,方便了解穿戴者的身体情况,并规划出适合穿戴者的步态。
45.应当理解,以上所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。由本实用新型的精神所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1