一种肌电式手指康复外骨骼的制作方法
1.本实用新型属于康复医疗器械技术领域,具体为一种肌电式手指康复外骨骼。
背景技术:
2.随着电子技术的发展,医疗电子产品越来越丰富,它们的出现也极大地促进了医疗和康复领域地发展,为病患朋友提供了更好地医疗和康复体验。
3.在手指康复领域,已经有不少以气动或直线电机驱动的主动式外骨骼。但这些产品普遍存在重量过于沉重,体积大,不能很好的贴合人体手指关节运行状态,导致手指康复训练效率低,恢复效果差,影响关节的正常运行。
技术实现要素:
4.本实用新型目的在于提供一种肌电式手指康复外骨骼,采用可实现弧形轨迹运动的伸缩杆来控制手指运动,与人体手指关节运动轨迹更贴合,提高外骨骼与人体手指的配合度,使得手指训练动作更加顺畅。
5.为实现上述目的,本实用新型采用的技术方案是:一种肌电式手指康复外骨骼,包括护板,在护板上设置有与各个手指位置相对应的用于驱动手指弯曲张开的驱动连杆机构;
6.所述驱动连杆机构为一个驱动件或由不少于两个的驱动件相互串联组成;
7.每个驱动件包括驱动壳体和设置在驱动壳体内可实现弧线轨迹运动的伸缩杆,在伸缩杆前端设置有指套架,在指套架上设置有用于固定手指的指套环。
8.作为上述技术方案的进一步改进,所述伸缩杆为弧形杆。
9.作为上述技术方案的进一步改进,所述驱动件连接外部的外骨骼系统信息终端。
10.作为上述技术方案的进一步改进,所述外骨骼系统信息终端通过mqtt服务器与pc端和/或数据库服务器和/或客户端连接。
11.作为上述技术方案的进一步改进,所述护板上设置有用于安装绑带对手掌进行固定的绑带安装孔。
12.作为上述技术方案的进一步改进,所述护板整体为与手背相配合的弧形板。
13.作为上述技术方案的进一步改进,所述驱动壳体内设置有驱动电机;所述伸缩杆为弧形齿条;所述驱动电机连接驱动齿轮;所述驱动齿轮与弧形齿条啮合。
14.作为上述技术方案的进一步改进,所述驱动件通过驱动壳体与护板连接。
15.作为上述技术方案的进一步改进,两个相互串联的驱动件通过指套架将对应驱动件的驱动壳体尾端与另一个驱动件的伸缩杆前端连接起来。
16.作为上述技术方案的进一步改进,所述指套架两侧设置有用于安装指套环的指套安装孔。
17.作为上述技术方案的进一步改进,所述指套环为由柔性带头尾相连构成的可调节大小的环体结构。
18.与现有技术相比,本技术方案的有益效果为:
19.1、本技术方案中采用护板与驱动件连接的方式,驱动件内采用可实现弧形轨迹运动的伸缩杆来控制手指运动,与人体手指关节运动轨迹更贴合,提高外骨骼与人体手指的配合度,使得手指动作更加顺畅。
20.2、本技术方案中,驱动件可以采用串联的方式实现对不同手指关节的动作控制,结构简洁,同时控制手指动作更加顺畅。
21.3、本技术方案中,驱动件中的电机可以与外界的外骨骼系统信息终端连接,外骨骼系统信息终端通过mqtt服务器与pc端和/或数据库服务器和/或客户端连接。通过外骨骼系统信息终端可以控制驱动电机的运行,同时医生或者患者也可以通过pc端或者客户端收集驱动电机的运行状态,从而获得对应患者的手指训练数据,更好的了解患者手指恢复状况,制定最佳的治疗方案。
附图说明
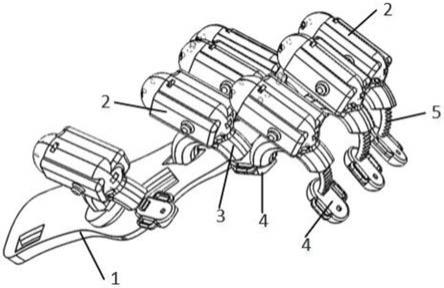
22.图1为外骨骼的侧面结构示意图;
23.图2为外骨骼背面结构示意图;
24.图3为外骨骼底面结构示意图;
25.图4为驱动件的内部结构示意图;
26.图5为指套环安装在指套架上的示意图;
27.图6为外骨骼与外部控制系统连接的框架结构示意图。
28.图中:1、护板;2、驱动件;3、驱动壳体;4、指套架;5、伸缩杆;6、驱动电机;7、驱动齿轮;8、指套安装孔;9、绑带安装孔;10、指套环。
具体实施方式
29.为了使本领域技术人员更好地理解本实用新型的技术方案,下面结合附图对本实用新型进行详细描述,本部分的描述仅是示范性和解释性,不应对本实用新型的保护范围有任何的限制作用。
30.请参阅图1至图5,在一种具体的实施方式中,一种肌电式手指康复外骨骼,包括护板1,在护板1上设置有与各个手指位置相对应的用于驱动手指弯曲张开的驱动连杆机构;
31.所述驱动连杆机构为一个驱动件2或由不少于两个的驱动件2相互串联组成;
32.每个驱动件2包括驱动壳体3和设置在驱动壳体3内可实现弧线轨迹运动的伸缩杆5,在伸缩杆5前端设置有指套架4,在指套架4上设置有用于固定手指的指套环10。
33.其中,驱动连杆机构根据不同的手指关节数量设置不同数量的驱动件2,大拇指位置设置一个驱动件2,其余手指可以设置两个相互串联的驱动件2。
34.指套环10用于套在对应的手指上,当驱动件2驱动伸缩杆5运动时,带动套在指套环10上的手指运动。
35.如图4所示,作为上述实施例的进一步优化,所述伸缩杆5为弧形杆。弧形杆伸缩时,产生弧线运动轨迹。
36.作为上述实施例的进一步优化,所述驱动件2通过有线或无线的方式连接外部的外骨骼系统信息终端。驱动件2可以通过电线与外部的外骨骼系统信息终端连接,外骨骼系
统信息终端收集驱动件2的运行状态;同时外骨骼系统信息终端实现对驱动件2的启动控制。
37.如图6所示,作为上述实施例的进一步优化,所述外骨骼系统信息终端通过mqtt服务器与pc端和/或数据库服务器和/或客户端连接。
38.如图1
‑
3所示,作为上述实施例的进一步优化,所述护板1上设置有用于安装绑带对手掌进行固定的绑带安装孔9。使用时,护板1位于手掌背面上,通过绑带将护板1与手掌固定。
39.如图1
‑
3所示,作为上述实施例的进一步优化,所述护板1整体为与手背相配合的弧形板。
40.如图4所示,作为上述实施例的进一步优化,所述驱动壳体3内设置有驱动电机6;所述伸缩杆5为弧形齿条;所述驱动电机6连接驱动齿轮7;所述驱动齿轮7与弧形齿条啮合。
41.其中驱动电机6可以采用二相四线减速箱步进电机,该型号电机体积微小,电机轴通过蜗轮蜗杆驱动减速箱运行进行输出,安装在本外骨骼上后占用空间小,确保了外骨骼简洁的外观。
42.作为上述实施例的进一步优化,所述驱动件2通过驱动壳体3与护板1连接。
43.作为上述实施例的进一步优化,两个相互串联的驱动件2通过指套架4将对应驱动件2的驱动壳体3尾端与另一个驱动件2的伸缩杆5前端连接起来。
44.作为上述实施例的进一步优化,所述指套架4两侧设置有用于安装指套环10的指套安装孔8。
45.作为上述实施例的进一步优化,所述指套环10为由柔性带头尾相连构成的可调节大小的环体结构。
46.本实用新型具体操作方式:
47.将护板1通过绑带绑定在手背上,将指套环10套在对应的手指上;通过外部的控制系统控制驱动电机6运行,从而实现对手指动作的康复训练。
48.本实用新型的进一步优化方式:
49.如图6所示,其中外骨骼机电系统指设置在外骨骼内的各个驱动电机6;外骨骼机电系统通过电线连接外骨骼系统信息终端;系统信息终端用于控制各个驱动电机6的运行以及收集驱动电机6的运行信息。
50.外骨骼系统信息终端通过有线或无线方式连接mqtt服务器;mqtt服务器再通过有线或无线的方式连接pc端或客户端;其中mqtt服务器连接数据库服务器;数据库服务器用于存储和处理外骨骼的驱动电机6运行数据。pc端用于医生使用,可以安装医用软件;客户端用于患者自己操作,可以安装app。
51.病人可使用客户端操作进行康复训练,并在app上查看当日训练数据。
52.医生可在pc端查看病人训练状况和恢复状况。并且可以直接为病人定制治疗方案和新的康复训练计划
53.外骨骼硬件系统,病人用app和pc端医用软件均通过中转服务器进行互联。中转服务器储存各个病人和各个医生的数据。
54.外骨骼机电系统用于采集关节力和角度信息和肌电信号后发往信息终端。数据经过信息终端预处理后发往mqtt服务器,由服务器分发至客户端、数据库服务器和pc端。pc端
数据库服务器和客户端也能将控制信息发往信息终端进而对外骨骼机电系统进行控制。医生可以在pc端查看患者运动状况并定制相应的康复计划下发到患者的外骨骼,实现互联网+远程医疗,契合当下轻量化居家康复的迫切需求。
55.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
56.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本实用新型的方法及其核心思想。以上所述仅是本实用新型的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将实用新型的构思和技术方案直接应用于其它场合的,均应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1