组织夹紧装置的制作方法
组织夹紧装置
优先权声明
1.本发明要求2019年7月29日提交的美国临时专利申请序列号62/879,874的优先权;其公开内容通过引用并入本文。
技术领域
2.本发明通常涉及用于治疗在经由插入装置进入的天然存在的体腔内的组织的装置、系统和方法。
背景技术:
3.消化道深处的微创手术虽然越来越普遍,但也突出了以前未完全解决的潜在问题。例如,在诸如ecrp(内窥镜逆行胰胆管造影)的手术中,目前可用的夹子的特性通常是有问题的,这是因为这些和类似的手术通常最好由插入器械(诸如,十二指肠镜)提供最佳服务,而这些器械具体地被配置为观察和治疗横向于装置的纵向轴线延伸的解剖结构。即,对于许多手术而言,医生可能更喜欢十二指肠镜,其包括具有横向于轴线的视场的光学器件,装置沿着该轴线延伸并且包括用于沿着类似的横向轴线插入治疗装置的端口。然而,许多治疗装置(例如,止血夹)最适合于沿着插入装置的纵向轴线施用,并且会增加与经由横向方法施用其的手术相关联的困难和/或风险。
技术实现要素:
4.本发明涉及一种用于治疗组织的装置。装置可以包括从在使用期间插入到活体内的目标部位的远端延伸至在使用期间保持在体外的近端的柔性插入部段;联接到插入部段的远端的末端执行器;以及接收在插入部段内并且从联接到在使用期间保持为用户可触及的致动器的近端延伸至联接到末端执行器的远端的控制线。控制线可在插入部段内移动以操作末端执行器,控制线和插入部段包括在其远侧部分中的弯曲部,其被配置为使得在静止状态下,控制线和插入部段以选定的弯曲半径弯曲通过预定的弧形。控制线的远侧部分被配置为进入并且通过插入装置的工作通道,而控制线不会塑性变形。
5.在一个实施例中,插入部段包括衬套,其远端联接至末端执行器,末端执行器是组织夹紧装置。
6.在一个实施例中,夹紧装置包括联接到控制线的远端的可滑动元件,可滑动元件联接到组织夹紧装置的组织夹持臂,使得当控制线在插入部段内向近侧和向远侧移动时,可滑动元件在组织夹紧装置的囊体内向近侧和向远侧滑动以将臂移入和移出囊体。
7.在一个实施例中,可滑动元件的近侧部分包括在其径向外部的邻接表面,其尺寸被设置为进行接合,当将可滑动元件的近侧部分向近侧拉出囊体至衬套中时,可滑动元件的径向外部径向向外推动衬套的一部分,以使衬套的锁定结构从囊体的对应的锁定结构脱离,以使囊体与衬套分离。
8.在一个实施例中,控制线中的弯曲部被配置为使得在静止状态下插入部段弯曲通
过约90度的弧形。
9.在一个实施例中,控制线中的弯曲部被配置为使得在静止状态下插入部段弯曲通过约45度的弧形。
10.在一个实施例中,可滑动元件的远侧部分还包括相对的定向指状物,其中的每一个的尺寸和形状被设置为通过在臂中的一个中的对应开口以维持臂的所需定向。
11.在一个实施例中,装置还包括在臂上的加宽的部段和近侧邻接表面,其限定了臂可以向近侧拉入囊体中的最大程度。
12.在一个实施例中,衬套经由联接器联接到组织夹紧装置的囊体,联接器包括围绕联接器的圆周分布的多个臂,臂中的每一个包括凹部,凹部的尺寸和形状被设置为接合衬套的锁定壁以将衬套联接至联接器,凹部中的每一个包括接合衬套的锁定壁的近侧表面和远侧表面,近侧和远侧表面中的第一个形成斜面,该斜面相对于与斜面所接触的锁定壁的表面成角度,斜面的定向被设置为使得当在衬套和联接器之间施加预定压缩时,斜面在锁定壁上滑动并且从其脱离,以使联接器和囊体与衬套分离。
13.在一个实施例中,衬套包括在囊体的一部分的上方向远侧延伸的第一臂和第二臂,臂中的每一个包括延伸到形成在囊体的外壁中的对应插孔中的销,该销形成允许囊体相对于衬套旋转的枢转连接。
14.在一个实施例中,可滑动元件包括经由易碎连杆彼此联接的轭架和受拉构件。
15.在一个实施例中,装置还包括在弯曲部的近端处的第一孔;在末端执行器的近端处的第二孔;以及致动绳,致动绳从联接到在使用期间保持为用户可触及的致动器的近端延伸至联接到末端执行器的远端,其中绳索通过插入部段,离开第一孔,进入第二孔,并且联接到远离弯曲部的装置的一部分。
16.本发明还涉及一种用于治疗组织的系统。该系统可以包括插入装置,插入装置包括端口、摄像头和沿着纵向轴线延伸通过插入装置的工作通道;以及组织治疗装置。装置可以包括从在使用期间插入活体内的目标部位的远端延伸至在使用期间保持在体外的近端的柔性插入部段;联接到插入部段的远端的末端执行器;以及接收在插入部段内并且从联接到致动器的近端延伸的控制线,控制线和插入部段包括在其远侧部分中的弯曲部,其被配置为使得在静止状态下,控制线和插入部段以选定的弯曲半径弯曲通过预定弧形,控制线的远侧部分被配置为进入并且通过插入装置的工作通道,而控制线不会塑性变形。
17.在一个实施例中,系统还包括在插入装置的远端的升降器,升降器改变控制线和插入装置中每一个的弯曲部。
18.在一个实施例中,插入装置的摄像头横向于插入装置的纵向轴线进行瞄准,从而在远离轴线径向延伸的大致圆锥形体积中产生观察区域。
19.另外,本发明涉及一种用于治疗组织的方法。该方法可以包括将柔性插入部段插入插入装置的工作通道中,该柔性插入部段从远端延伸到近端,远端在使用期间被插入到活体内的目标部位,近端在使用期间保持在体外;将插入装置插入活体内的目标位置;推进插入部段通过插入装置的工作通道,直到联接到插入部段的远端的末端执行器经由端口离开插入装置,插入装置的工作通道基本上平行于插入装置的纵向轴线延伸,并且端口基本上横向于纵向轴线延伸,延伸通过插入部段的控制线包括在其远侧部分中的弯曲部,控制线中的弯曲部被配置为使得在静止状态下,控制线使插入部段弯曲通过基本上对应于从工
作通道到端口的过渡部的弧形。
20.在一个实施例中,插入装置是十二指肠镜并且末端执行器是组织夹紧装置。
21.在一个实施例中,该方法还包括对插入部段进行定位和定向,使得当组织夹紧装置从端口穿出时插入部段的远侧部分基本上在静止状态下。
22.在一个实施例中,组织夹紧装置包括在其近端处的直径上相对的销,其还包括致动控制线以围绕销横向旋转组织夹紧装置。
23.在一个实施例中,插入部段包括致动绳,其从近端延伸至远端,通过插入部段,离开在弯曲部的近端处的第一孔,进入在组织夹紧装置的近端处的第二孔,并且联接到组织夹紧装置,其还包括拉动致动绳的近端,直到致动绳将组织夹紧装置弯曲至所需的形状。
附图说明
24.图1a示出了根据第一实施例的夹子组件;
25.图1b示出了图1的夹子的近景部分横截面视图;
26.图2示出了从十二指肠镜展开的图1的夹子组件;
27.图3示出了图1的夹子组件在使用十二指肠镜的升降器调整其位置的展开;
28.图4示出了根据另一个实施例的夹子组件的横截面视图;
29.图5示出了在夹子和柔性插入部段之间的联接的实施例;
30.图6示出了在夹子和柔性插入部段之间的联接的第二实施例;
31.图7a示出了在第一形态中的包括图6的联接的夹子组件;以及
32.图7b示出了在第二形态中的图7a的夹子组件。
33.图8示出了根据另一个实施例的夹子组件。
具体实施方式
34.参考下列描述和附图可以进一步地理解本发明,其中相同的元件用相同的参考数字进行标示。本发明涉及一种用于治疗横向于诸如十二指肠镜的插入器械的纵向轴线的组织的装置和方法。更具体地,本实施例涉及用于在相关于插入装置的纵向轴线横向偏移的位置中夹紧组织的装置。要注意的是,如本文所使用的术语“近侧”和“远侧”指朝向(近侧)和远离(远侧)装置的用户的方向。
35.虽然本文描述的实施例被具体地配置为经由十二指肠镜治疗胃肠道,但是本领域的技术人员将理解,本文描述的实施例也可以用于闭合乳头(内胆管的圆形开口)以及治疗在难以到达的位置(无论是经由十二指肠镜中的横向定向的端口还是通过标准内窥镜中的纵向端口接近的)中的组织缺损。例如,十二指肠镜通常用于在可能需要闭合的胃的部段中进行切除。另外地,其中弯曲部不像90度那么尖锐,例如,其中弯曲部为45度的实施例可以用于在缺损定位不便以及不能利用标准内窥镜的场景中的前视镜。
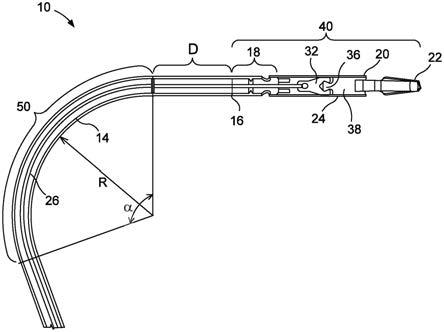
36.如图1至3所示,在该示例中,根据本发明的实施例的治疗装置10是通过十二指肠镜12插入的夹紧装置。装置10包括柔性插入部段14,其在该实施例中形成为从近端(未示出)延伸至联接到衬套18的远端16的管状线圈。衬套18可释放地联接到夹子20,其包括一对可滑动地接收在囊体24内的夹臂22。控制线26从在近侧致动器(未示出)延伸,该近侧致动器在使用期间保持为用户可在十二指肠镜的近端外部的身体外部触及到。控制线26通过衬
套18进入囊体24,在那里,其联接到夹子20,使得控制线26向近侧和向远侧通过插入部段14的移动使夹臂22相对于囊体24向近侧和向远侧移动。
37.除了插入部段14和控制线26之外,该实施例的夹子20可以以任何已知的方式构造。因此,夹子20的内部构造的具体构造以及夹子20与衬套18之间的连接仅是示例性的。在该示例中,控制线26包括扩大的远侧顶端28,其接收在轭架32内的具有对应形状的腔30内,该轭架32可滑动地接收在囊体24内。轭架32包括相对的臂34,其夹持受拉构件38的向近侧延伸的凸耳36。夹臂22围绕受拉构件38弯曲,其中夹臂22的近端联接到轭架32。
38.如本领域的技术人员将理解的,尽管插入部段14是柔性的,但是从衬套18的近端延伸到夹臂22的远端的装置10的远侧部分40基本上是刚性的。在用户希望通过横向于装置(夹子是通过该装置插入的)的纵向轴线的端口展开夹子的应用中,该远侧部分40的刚性会给使用已知夹子的用户带来困难。即,该远侧部分40的刚性和长度可能使得这种夹子难以围绕离开诸如十二指肠镜12的端口42的横向端口所需的弯曲半径弯曲。由于像十二指肠镜12这样的镜也是横向于镜12的纵向轴线l进行瞄准的,镜12的摄像头48的观察区域46是远离轴线l径向延伸的大致圆锥形体积。从端口42穿出的标准夹子通常将在观察区域46的外部远离镜12向远侧延伸。如本领域的技术人员将理解的,想要将该夹子朝向观察区域46内的目标组织部位重新定向的用户可以使用镜的升降器52来弯曲该夹子。然而,使用升降器52迫使夹子中的这种急剧弯曲有损坏夹子和/或镜12的风险。
39.根据该实施例的装置10的控制线26被预处理以包括弯曲部50,使得在静止状态下,插入部段14围绕半径r弯曲。在该实施例中,半径r的范围可以是5到15mm。弯曲部50优选地在衬套18近侧的选定距离d处结束,使得当装置10离开端口42时,弯曲部50将位于与镜12的升降器52相邻的镜12的工作通道的一部分中。在该实施例中,距离d的范围可以是0到12mm;更短的距离可能是优选的,使得组织更靠近镜12。在该实施例中,弯曲部50围绕约90度的弧角α延伸,其中具有约10度的变化,即80度到100度,以以使装置10大致横向瞄准轴线l。
40.然而,在其他实施例中,弧角α可以处于不同的角度形态,例如45度,以与前视镜一起用于放置位置不便的病灶。弯曲部50通过将控制线26弯曲成预定形状的机械塑性变形施加在控制线26上。控制线26由坚硬且刚性的材料制成,使得控制线26能够承受拉直控制线26的力并且弹回至其预定形状。类似地,管状线圈具有包含通过管状线圈的热处理施加的弯曲部的预定形状。管状线圈在被迫成直线形状之后也可以弹回至其预定形状。因此,可以向控制线26和管状线圈施加矫直力以随后进行矫直,但是在释放矫直力之后,控制线26和管状线圈恢复至其相应的预定形状。
41.本领域的技术人员将理解,由于根据该实施例的装置10最初从摄像头48的观察区域46内的端口42延伸出来,当装置10由摄像头48实现可视化的同时,升降器52可以用作装置10瞄准的精细校正,如图3所示。如上所述,控制线26中弯曲部50的这种布置可以与任何已知的夹紧装置(或其他末端执行器)一起使用,该已知的夹紧装置包括柔性插入部段以便经由横向瞄准的端口(如镜12的端口42)展开装置。装置10具有朝向阻力最小的路径移动的自然趋势,因此装置10能够与端口42自动对准以离开镜12。在示例性实施例中,近侧标记可以被实施在内部部段14的近端上,以允许医生在装置10移出镜12时跟踪装置10。
42.图4示出了夹紧装置100,其包括联接到衬套104的夹子101,衬套104的近端联接到
柔性插入部段106的远端,控制线108通过该柔性插入部段106延伸以联接到轭架110,轭架110将上述的受拉构件和夹子20的轭架的功能并入单个元件中。这消除了夹持受拉构件38的凸耳36的轭架32的臂34,从而允许夹子机构的相应缩短,该夹子机构还允许轭架110的臂114进一步向远侧移动,从而允许夹臂的相应缩短。
43.本领域的技术人员将理解,夹紧装置100可以与任何标准插入部段和控制线一起使用,或者可以包括控制线/插入部段组合,该组合包括如上所述的用于控制线26和插入部段14的弯曲部50。根据该实施例的装置100的可操纵性通过将控制线108联接到夹臂112的内部机构的结构而进一步增强,该结构使得装置100的刚性部分能够从衬套104的近端向远侧延伸通过囊体102到达夹臂112的远端。
44.轭架110包括从其中间部段延伸的一对臂114并且包括经由易碎接头118联接到轭架110的近侧部分的夹臂保持部段116(例如,通过焊接或与轭架110一体地形成进行),易碎接头118可以形成例如为夹臂保持部段116的窄化或弱化部段。在易碎接头118的远侧,夹臂保持部段116包括接收在夹臂112之间的舌片120,以使夹臂112远离彼此偏置,使得当将夹臂112向远侧推出囊体102时,夹臂112展开至如图4所示的组织接收形态中。该布置还允许夹臂112的近侧部分比夹子20中的更短,从而减少了夹子101的总长度。夹臂保持部段116还包括相对的定向指状物122,其中的每一个通过在夹臂112中的一个中的对应开口,以当夹臂112向近侧和向远侧移动通过囊体102时,保持夹臂112的所需的定向。
45.在该实施例中,定向指状物122的尺寸也被设置为使得其基本上延伸跨过并且可滑动地接合囊体102的相对表面,以确保当控制线108被推进或缩回通过插入部段106时,夹臂112向近侧和向远侧平滑地移动。夹臂112包括加宽部段124和近侧邻接表面126,其限定了夹臂112可以被向近侧拉入囊体102中的最大程度。即,邻接表面126相对于装置100的纵向轴线l横向延伸到大于开口128的直径的程度,使得当夹臂112被向近侧拉入囊体102中时,邻接表面126最终接触围绕开口128的囊体102的端部。
46.为了在夹子101已经根据需要定位夹持目标组织时展开夹子,用户向近侧撤回控制线108(例如,通过致动在近侧手柄(未示出)上的致动器进行)直到邻接表面126接触囊体102。用户将感觉到对控制线108进一步向近侧移动的阻力。用户然后向控制线108施加增加的拉力,直到当达到预定的拉力水平时,易碎接头118失效并且将轭架110被向近侧拉过囊体102远离夹臂保持部段116。当轭架110远离夹臂保持部段116向近侧移动时,轭架的臂114远离夹臂112的近端130移动,释放夹臂112的近端130以向外弹开,使得在夹臂112的近端130上的锁定特征远离轴线l径向向外弹开,以接合在囊体102上的锁定特征132。这将夹臂112锁定在组织夹持形态中,其中将夹臂112的远端一起朝向轴线l拉动以夹持定位在其之间的组织。
47.另外,在轭架110与夹臂保持部段116分离之后,将其进一步向近侧拉出囊体102的近端。在这一点上,与轭架110的更近侧部分相比,轭架110的臂114远离轴线l径向延伸地更远,以接合衬套联接特征134,该衬套联接特征134夹持囊体102的对应联接特征136。当轭架110被向近侧拉入衬套104中时,臂114远离轴线l径向向外推动衬套联接特征134,从而使其脱离与囊体102的联接特征136的接合,并且将夹子101从衬套104和插入部段106中分离,留下锁定在目标组织的夹持部分上的夹子101,同时从体内撤回装置100的其余部分。如本领域的技术人员将理解的,可以采用任何已知的联接件,衬套通过该联接件可释放地联接到
夹子的囊体,该联接件包括下述的图5的联接件。
48.如图5所示,夹紧装置(例如,装置100)的囊体202和衬套204之间的联接件200包括联接器206。联接器206的远端形成为联接到囊体202的管208,而联接器206的近端包括围绕管208的圆周分布的多个臂210。臂210中的每一个包括具有近侧锁定表面214的凹部212,该近侧锁定表面214夹持衬套204的径向突出部分216。在该实施例中,径向突出部分216形成为远离轴线l径向向外突出以远离衬套204的外表面大体垂直地延伸的环形表面。该实施例的臂210的近侧锁定表面214也大体垂直于轴线l,使得囊体202经由联接器206牢固地联接到衬套204。
49.凹部212中每一个的远侧表面形成为斜面218,其以一个角度(例如,与臂210的内表面的范围在30和45度之间的角度)远离径向突出部分216的远侧表面220的径向外边缘向远侧延伸,使得斜面220中每一个的径向最外端接触远侧表面220,同时在斜面218的更多径向向内定位的部分和远侧表面220之间形成间隙。因此,当将包括联接件200的夹子通过插入装置插入到体内的目标部位时,臂210将囊体202牢固地锁定到衬套204上。然而,如上所述,当夹子被拉入囊体中至其不能进一步向近侧移动到囊体202中的点时,用户向控制构件222施加增加的指向近侧的力,其与当插入部段106抵抗压缩时指向远侧的力相反。
50.当向联接器206施加这种压缩时,斜面218抵靠衬套204的远侧表面220向近侧滑动,从而使臂210的近端在图5的箭头a的方向上向外旋转。这使臂210的近侧锁定表面214脱离与径向突出部分216的接合,直到径向突出部分216与凹部212脱离,从而使衬套204与联接器206分离。因此,管208和囊体202可以围绕轴线l自由旋转。在另一个实施例中,三重线配置可以用于产生控制线驱动的旋转,其中用户旋转夹子,使得其可以根据需要进行放置。在另一个实施例中,囊体202可以固定到衬套204,因此,不可能发生围绕轴线l的旋转。
51.如图6、7a和7b所示,包括根据第二实施例的联接机构的装置300包括囊体302,其联接到衬套304并且容纳轭架306,控制线308附接到轭架306。轭架306与受拉构件(未示出)或任何其他已知的夹紧机构联合操作,只要当展开夹子时,使轭架306与控制线308一起自由地向近侧移出囊体302进入衬套304中即可。如将在下面看到的,衬套包括围绕囊体302的近侧部分延伸的相对臂310,使得在衬套304的远端处的直径相对的销312延伸到形成在囊体302的壁中的插孔314中。臂310经由倾斜部分315向外张开。当臂310围绕囊体302的外部延伸时,臂310彼此分离的距离大于囊体302的直径,而倾斜部分315限定了衬套304的直径减小部分,该衬套304具有比囊体302的直径更小的直径,使得如下面更详细描述的,当轭架306被向近侧拉过衬套304时,可在囊体302内滑动的轭架306的径向外边缘将冲击和径向向外推动倾斜部分315。
52.然而,本领域的技术人员将理解,衬套304的外径可以在其整个长度上保持一致,只要内径减小(在至少一个方向上)即可,使得在已经展开夹子并且轭架306被向近侧拉过衬套304之后,轭架306的径向外表面接触衬套304的至少一部分的内表面,以径向向外驱动臂310。因此,当轭架306接触倾斜部分315并且径向向外驱动其时,销312被径向向外地推出插孔314,从而从衬套304释放囊体302并且使夹子与插入部段316、衬套304、控制线308和装置的整个近侧部分分离。
53.此外,如本领域的技术人员将理解,如果插孔314和销312被制成圆形,囊体302将可相对于衬套304和插入部段316旋转。当然,这种旋转将受到控制线308弯曲的任何阻力的
限制。然而,这种旋转(如图7a和7b所示)可以进一步有助于促进夹子通过包括急弯曲部的路径的应用,诸如,例如,当夹子纵向通过十二指肠镜以及随后必须弯曲通过约90度的弧形以经由面向横向的端口离开镜时可能遇到的急弯曲部。
54.如图8所示,治疗装置400可以与上述治疗装置10基本相似。装置400可以包括控制线426、插入部段414、衬套418、包含夹臂422的夹子420和远侧部分440。类似于上述的远侧部分40,远侧部分440从衬套418的近端延伸到夹臂422的远端。远侧部分440包括囊体424。囊体424容纳联接机构,其类似于装置10和100至300的联接机构。联接机构包括轭架432、凸耳436、受拉构件438和夹子420。此外,控制线426具有类似于控制线26的弯曲部50的弯曲部450,其从近端(未示出)延伸到具有与装置10的半径r相似的半径r’的远端。在该实施例中,弯曲部450围绕弧角α’延伸,角α’类似于装置10的角α。在该实施例中,距离d’在弯曲部450的远端和衬套418的近端之间,距离d’类似于装置10的距离d。
55.装置400包括在弯曲部450的近端处的第一孔462和在远侧部分440的近端处的第二孔464。第一孔462和第二孔464的尺寸和形状被设置为使得致动绳470可以在其之间延伸以允许更好地定位夹子420。在远侧部分440的近端,绳470从近端(未示出)延伸至远端。绳470的一部分延伸通过插入部段414至第一孔462。绳470的近端是用户可触及的,使得用户可以在绳470的近端上向近侧拉动以矫直绳470,从而在第一孔462和第二孔464之间形成斜边并且使弯曲部450进一步弯曲。通过在拉动绳470的近端时施加不同大小的力,用户控制弯曲部450的弯曲和远侧部分440的位置。
56.如将进一步理解的,将囊体和衬套之间的这种枢转连接与在邻近插入部段的远端处具有弯曲部的控制线(例如,上述控制线26)组合在一起的的夹子组件可以在具有横向端口的操作中和/或需要进入难以到达的位置(需要急弯曲半径)的手术中显示出显著改进。通过采用上述装置100的较短夹子机构,可以进一步改进这种组合。这种装置在插入装置,诸如具有至其工作通道的纵向取向的出口或具有上述十二指肠镜的横向部分的内窥镜中将是有效的,以例如,闭合在大肠或胃肠道的其他部分中的复杂位置中,在密闭空间或在可用于镜的视野是倾斜的地方中的病灶。
57.本领域的技术人员将理解,在不脱离本技术的教导的情况下,可以对所描述的实施例进行各种修改。例如,虽然已经关于治疗内出血和闭合组织中的切除缺损或孔来描述了实施例,但是本领域的技术人员将理解,可以修改实施例以用于类似的结构应用。对于类似的结构应用而言,可以包括用于活检钳的插入部段,其中插入部段的曲率可以用于在不便或倾斜位置中获得样本。另外地,这些实施例可以被修改为包括30、45或60度的弯曲部,以适应不同的用户需求并且用在前视镜上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1