包括第一换能器和第二换能器之间的铰接接头的医疗装置,以及实现该装置的设备和存储装置的制作方法
包括第一换能器和第二换能器之间的铰接接头的医疗装置,以及实现该装置的设备和存储装置
相关申请的交叉引用
1.本技术根据35 u.s.c.
§
119要求于2019年10月7日提交的美国临时专利申请62/911,763的优先权的权益,该申请通过引用全部并入本文以用于所有目的。
技术领域
2.本发明总体涉及医疗装置的领域。特别地,本发明涉及便于柔性细长构件进入和/或通过选定解剖结构的装置、系统和方法。
背景技术:
3.通常,执行内窥镜插管过程需要将导丝和/或内窥镜附件工具(例如,括约肌切开器、插管、导管、换能器等)推进至并且通过患者的解剖结构。内窥镜插管过程的一个示例包括内窥镜逆行胰胆管造影术(ercp)。ercp手术可以用于检查胆管。在ercp手术期间,内窥镜被插入通过口腔并且被推进至十二指肠。尝试识别胆管和胰腺管的共同进入点。一旦成功识别,导丝可以被推进到胆管中以执行各种治疗手术,诸如结石管理或胆道恶性肿瘤的治疗。多次尝试进入胆管可能会导致手术时间延长或失败。此外,多次进入尝试可能会导致组织创伤。此外,即使在内窥镜中提供相机,相机通常也不提供对管道通路或超出共同进入点的管道的一般解剖结构的可视化。由于架构/解剖结构因患者而异,腔壁之外缺乏可视化可能需要医师将导丝盲目地操纵到超出腔壁的管道中,这在一些情况下可能导致错误管道的意外插管。
4.出于这些考虑,可以通过本发明的装置、系统和方法实现各种有利的医学结果。
技术实现要素:
5.在一个方面,本发明涉及一种医疗装置,其包括柔性细长构件,柔性细长构件具有近侧部分和远侧部分。具有第一焦点区域的第一换能器可以沿着柔性细长构件的远侧部分设置。第一换能器可以被配置为生成第一图像。第一图像可以包括体腔壁的特征。在一些实施例中,第一换能器可以包括光学传感器并且第一图像可以包括光学图像。体腔壁可以包括十二指肠壁。体腔壁的特性可以包括乳头。第二换能器可以沿着柔性细长构件的远侧部分设置。第二换能器可以被配置为生成第二图像。第二图像可以包括在体腔壁外部的特征。在各种实施例中,第二换能器可以包括超声换能器并且第二图像可以包括超声图像。在体腔壁外部的特征可以包括在十二指肠壁后面的结构,诸如胆管或胰管。在一些实施例中,超声换能器是被配置为检测由光激发目标生成的声波并且基于检测到的声波生成图像的传感器。在这样的实施例中,可以包括能量源以生成能量脉冲以激发在体腔壁外部的组织,以用超声换能器进行光声成像。铰接接头可以沿着柔性细长构件的远侧部分设置在第一换能器和第二换能器之间。铰接接头可以被配置为定位第二换能器以促进基于第一和第二图像生成图像。图像可以包括体腔壁的特征和在体腔壁外部的特征。铰接接头可以被配置为将
第二换能器定位在第一换能器的第一焦点区域的至少一部分内。铰接接头可以被配置为使体腔壁与第二换能器接触以促进生成第二图像。第一球囊和第二球囊可以设置在柔性细长构件的远侧部分的周围。第一和第二球囊可以被配置为将第一换能器或第二换能器定位在体腔内。第一和第二换能器可以沿着柔性细长构件的远侧部分设置在第一球囊和第二球囊之间。流体通道的出口可以设置在第一球囊和第二球囊之间,以用流体填充在第一和第二球囊之间的体腔的区域以促进生成包括在体腔壁外部的特征的第二图像。
6.在另一个方面,本发明涉及一种设备,其包括处理器和存储器,存储器包括指令,当由处理器执行时,指令致使处理器执行下列中的一个或多个。在一些实施例中,存储器可以包括致使处理器用第一换能器生成第一图像的指令。在一些这样的实施例中,第一图像可以包括体腔壁的特征。在实施例中,存储器可以包括致使处理器用第二换能器生成第二图像的指令。在许多这样的实施例中,第二图像可以包括在体腔壁外部的特征。在各种实施例中,存储器可以包括致使处理器基于第一和第二图像来创建包括体腔壁的特性和在体腔壁外部的特征的组合图像的指令。在一个或多个实施例中,存储器可以包括致使处理器基于第一和第二图像确定轨迹可视化的指令。在一个或多个这样的实施例中,存储器可以包括致使处理器在组合图像中生成轨迹可视化的指示和/或用体腔内部的光源生成轨迹可视化的指示的指令。存储器可以包括致使处理器将第二换能器定位在第一换能器的焦点区域的至少一部分内的指令。存储器可以包括致使处理器来使体腔壁与第二换能器接触以促进生成第二图像的指令。
7.在又一个方面,本发明涉及一种方法。该方法可以包括用第一换能器生成第一图像。第一图像可以包括体腔壁的特征。该方法可以包括用第二换能器生成第二图像。第二图像可以包括在体腔壁外部的特征。该方法可以包括基于第一图像和第二图像来创建包括体腔壁的特征和在体腔壁外部的特征的组合图像。在一个或多个实施例中,该方法可以包括基于第一和第二图像确定轨迹可视化。在一个或多个这样的实施例中,该方法可以包括在组合图像中生成轨迹可视化的指示和/或用体腔内部的光源生成轨迹可视化的指示。该方法可以包括将第二换能器定位在第一换能器的焦点区域的至少一部分内。该方法可以包括使体腔壁与第二换能器接触以促进生成第二图像。该方法可以包括使一个或多个球囊充胀以将第一换能器或第二换能器定位在体腔内。
附图说明
8.参考示意性的且不旨在要按比例绘制的附图以示例的方式描述了本发明的非限制性实施例。在附图中,所示的每个相同或几乎相同的组件通常由单个数字表示。为了清楚起见,在阐述不是让本领域的技术人员理解本发明所必需的情况下,并非每个组件均在每个图中进行标示,且不是每个实施例的每个组件都示出。在附图中:
9.图1示出了根据本文所述的本发明的医疗装置的实施例。
10.图2示出了根据本文所述的本发明的柔性细长构件的远端的实施例。
11.图3示出了根据本文所述的本发明的用于柔性细长构件的操作环境。
12.图4a和图4b示出了根据本文所述的本发明的将换能器定位在焦点区域内的实施例。
13.图5示出了根据本文所述的本发明的在示例性操作环境中的柔性细长构件的远端
的实施例。
14.图6a至图6f示出了根据本文所述的本发明的成像和轨迹可视化的实施例。
15.图7a至图7c示出了根据本文所述的本发明的柔性细长构件的远端的各种实施例。
16.图8示出了根据本文所述的本发明的计算架构的实施例。
具体实施方式
17.各种实施例通常针对用于促进柔性细长构件(例如,内窥镜附件工具)进入和/或通过选定的解剖结构,诸如,通过生成图像来定位和/或导航柔性细长构件的组件或定位例如,解剖特征的成像技术。一些实施例针对用多种成像技术生成图像以定位解剖特征和/或柔性细长构件的组件,以用于检查、定向和/或促进进入身体通道或腔和/或导航通过身体通道/腔中的一个或多个。
18.各种另外或替代实施例通常针对基于在身体通道或腔外部的解剖结构来促进通过和超出组织壁的可视化,诸如通过生成图像来定位和/或导航至身体通道或腔内的位置的成像技术。一些实施例针对用多种成像技术生成图像以定位超出在其中进行柔性细长构件的导航的身体通道/腔的壁的解剖特征和/或结构,以用于检查、定向和/或促进进入超出身体通道/腔的解剖特征或结构中的一个或多个。一些实施例针对协调这种成像技术与其他成像技术,诸如用于使解剖结构可视化和/或在体内进行导航的成像技术。
19.在一个实施例中,例如,铰接接头可以沿着柔性细长构件设置在第一换能器和第二换能器之间,第一换能器被配置为生成包括体腔壁(诸如十二指肠壁的乳头)的特征的第一图像,第二换能器被配置为生成包括在体腔壁外部(诸如胆管或胰管)的特征的第二图像。在这样的实施例中,铰接接头可以被配置为定位第二换能器以促进基于第一和第二图像来生成包括体腔壁的特征和在体腔壁外部的特征的组合图像。在实施例中,第一和第二图像(或组合图像)可以用于促进柔性细长构件进入和/或通过选定的解剖结构,诸如胆管。在一些实施例中,可以基于第一和第二图像生成轨迹可视化。在一些这样的实施例中,轨迹可视化可以包括在组合图像中和/或经由光源生成。这些和其他实施例进行了描述并且要求保护。
20.促进柔性细长构件进入和/或通过选定解剖结构的一些挑战包括定位选定的解剖结构和根据需要定位柔性细长构件的远端以进入选定的解剖结构。这些挑战可能是由几个因素引起的,诸如将多自由度(例如,八个)内窥镜,诸如十二指肠镜操纵至精确位置中的人体工程学以及无法使模糊或隐藏的进入点可视化。例如,目标身体通道可以相对于内窥镜附件工具以困难的角度进行定向(例如,钝角、正交、倾斜),具有非常小或密封的开口,或包括曲折的解剖结构、阻塞(例如,石头等)和良性或恶性结构。医疗专业人员可能会进行多次尝试以实现成功的插管。此外,对包括或围绕目标身体通道的组织造成创伤的可能性随着插管尝试的次数而增加。在一些情况下,可能需要医疗专业人员完全中止插管过程。
21.例如,无法对胆总管进行插管是ercp手术失败的一个原因。在插管过程中,关于超出共同进入点的管道的解剖结构的信息可能是不可用的,这进一步增加了复杂性。例如,关于超出共同进入点的管道的解剖结构的位置/取向信息可能是不可用的。在没有关于管道的解剖结构的信息的情况下,医疗专业人员尝试将导丝摸索地操纵到胆管中。
22.本文描述的各种实施例包括能够定位选定的解剖结构、定位柔性细长构件以进入
选定的解剖结构以及以安全、准确和可靠的方式进入选定的解剖结构的医疗装置。在实施例中,本文所述的一个或多个装置可以利用多模态成像来定位选定的解剖结构、定位柔性细长构件以进入选定的解剖结构和/或进入选定的解剖结构。在实施例中,多模态成像可以包括利用经由两种或更多种类型和/或波长的传播能量捕获的图像。例如,包括光学传感器的第一换能器可以用于在体腔内生成光学图像以识别/定位体腔壁的特征,例如视觉地/光学地。包括超声换能器的第二换能器可以用于生成具有体腔的超声图像,以识别/定位在体腔壁外部(例如,超出体腔壁)的特性或特征。包括光声传感器的第二换能器可以与能量源结合使用,该能量源被校准以激发在体腔壁外部的组织,以生成和检测光声信号并且生成识别或定位在体腔壁外部(例如,超出体腔壁)的特性或特征的图像。在这种情况下,可以基于超声或光声图像获得关于超出进入点的管道的选定解剖结构的信息,以确定选定解剖结构的架构/结构。应当理解,术语“换能器”和“传感器”在本文中可以互换使用,而无意指示该术语的范围或含义中的差异。本文所述的一个或多个选定的解剖结构可以包括患者具体的解剖结构。例如,在一些患者体内,进入点可能是十二指肠壁中胆管和胰管的共同入口,而在其他患者体内,胆管和胰管在十二指肠壁中可能具有单独的进入点。
23.在一些实施例中,可以同时和/或实时地生成不同的图像。在实施例中,可以基于一组多模态图像生成组合图像。在许多这样的实施例中,组合图像可以包括在该组多模态图像中的每个图像的一个或多个特性。例如,组合图像可以包括来自光学图像的十二指肠壁中的乳头和来自超声或光声图像的十二指肠壁后面的结构(例如,管道结构)。在实施例中,关于管道的解剖结构的信息(例如,组合图像)可以显示在用户界面上,诸如将图像和/或轨迹可视化传送给执行插管过程的医疗专业人员。
24.此外,在实施例中,一个或多个接头可以设置在柔性细长构件的远端,位于最远侧顶端和远端的更为近侧的区域之间,诸如在第一和第二换能器之间。一个或多个接头可以被配置为定位第二换能器以促进生成组合图像。例如,一个或多个接头可以定位第二换能器,使得由第二换能器生成的超声图像包括在由第一换能器生成的光学图像中捕获的在十二指肠壁部分后面的在十二指肠壁外部的特性。在一些实施例中,一个或多个接头可以设置在第一和第二换能器之间,以将第二换能器带到第一换能器的焦点区域内,并且促进第二换能器的适当定位以生成超声图像。在各种实施例中,经由一个或多个接头铰接第二换能器可以使得第二换能器能够被放置成与组织壁(例如,十二指肠壁)紧密接触,同时允许第一换能器保持离开壁并且继续产生有用的图像(例如,具有可识别特征的光学图像)。
25.更一般地,本文所述的一个或多个装置可以包括一个或多个接头,其沿着柔性细长构件设置在位于细长构件的远端的近侧区域处的第一位置和位于细长构件的远端的远侧区域处的第二位置之间,诸如在第一换能器和第二换能器之间,以促进用柔性细长构件进行成像和/或进入选定的解剖结构。在实施例中,一个或多个接头可以用于定位/定向柔性细长构件的一个或多个组件和/或部分,诸如将第二换能器定位在第一换能器的焦点区域内或将柔性细长构件的远侧区域的一部分定位在体腔内。例如,接头中的一个或多个可以包括可充胀的球囊。在这样的示例中,球囊可以充胀以密封体腔的一个区域以至少部分地用流体填充(例如,以促进超声成像或施加治疗)。在一些实施例中,一个或多个接头可以进行操作以促进插管,诸如通过振动、铰接和/或致动进行。
26.本文所述的组件、装置和/或技术中的一个或多个可以用作系统的一部分以促进
以安全、有效和可靠的方式执行插管过程。在实施例中,根据本发明的系统可以包括一个或多个医疗装置,其能够定位选定的解剖结构、定位柔性细长构件以进入选定的解剖结构以及以安全、准确和可靠的方式进入选定的解剖结构。在这些和其他方式中,这里描述的组件/技术可以经由实现具有优势特征的更有效且更好地发挥作用的医疗装置来改善患者护理、增加用户体验、减少学习曲线、提高成功率和/或减少不良结果。在实施例中,本文所述的组件和/或特征中的一个或多个可以导致优于传统计算机技术的若干技术效果和优势,包括增加的能力和提高的适应性。例如,可以使用本文描述的可视化技术来提供对一个或多个选定解剖结构的改进的认识。在各种实施例中,本文描述的方面、技术和/或组件中的一个或多个可以经由一个或多个计算装置在实际应用中实施,并且从而向一个或多个计算装置提供附加和有用的功能,从而导致更有能力、更好地发挥作用并且改进的计算装置。此外,本文描述的方面、技术和/或组件中的一个或多个可以用于改进一个或多个技术领域,包括插管、诊断、治疗、成像、机器人、嵌入式系统和/或控制系统。
27.在实施例中,本文所述的组件可以提供具体且特定的方式以使得能够进行多模态成像和/或插管。在几个这样的实施例中,具体且特定的方式可以包括,例如,控制、监测换能器、传感器、接头、工作通道和用户界面中的一个或多个和/或与其对接,以促进一个或多个插管过程。在一个示例中,具体且特定的方式可以简化ercp手术,以使医疗专业人员能够快速学习以安全且可靠地进入胆管。
28.在实施例中,本文描述的组件中的一个或多个可以作为一组规则来实施,该组规则通过允许之前不可由计算机执行的功能来改进与计算机相关的技术,使得实现改进的技术结果。在实施例中,所允许的功能可以与插管装置和/或过程相关联。例如,所允许的功能可以包括基于经由第一成像模式生成的第一图像和经由第二成像模式生成的第二图像创建组合图像,该组合图像包括体腔壁的特征和在体腔壁外部的特征。在一些实施例中,所允许的功能可以包括将换能器定位在具有一个或多个接头的另一个换能器的焦点区域内,诸如以促进用换能器生成图像。在一些实施例中,所允许的功能可以包括经由能量源生成能量脉冲,以激发在体腔壁外部的组织;以及经由传感器感测由组织生成的能量,以促进图像生成。在各种实施例中,所允许的功能可以包括利用一个或多个接头来定位和/或进入插管过程的目标。
29.本发明不限于所述的特定实施例。在本文中使用的术语仅用于描述特定的实施例,且不旨在超出所附权利要求的范围进行限制。除非另有限定外,本文使用的所有技术术语具有与本发明所属领域的普通技术人员通常理解的相同的含义。
30.尽管本发明的实施例可以具体参考用于在内窥镜逆行胰胆管造影术(ercp)手术期间对胆总管(cbd)或胰管(pd)进行选择性插管的医疗装置和系统(例如,通过十二指肠镜插入的内窥镜附件工具和/或导丝等)来进行描述,但是应当理解,这种医疗装置和系统可以用于需要导航一个或多个附件工具通过管道、腔或血管解剖结构的各种医疗手术,包括,例如,介入放射学手术、球囊血管成形手术、溶栓手术、血管造影术等。本发明的医疗装置不限于十二指肠镜,并且可以包括用于进入身体通道或腔的各种医疗装置,包括,例如导管、输尿管镜、支气管镜、结肠镜、关节镜、膀胱镜、宫腔镜等。此外,所公开的医疗装置和系统还可以经由不同的接入点和方法插入,例如,经皮、内窥镜、腹腔镜或其某种组合。
31.如本文所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文
另有明确指示外。还将要理解的是,当在本文中使用时,术语“包括”和/或“包括”或“包含”和/或“包含”指明所述特征、区域、步骤、元件和/或组件的存在,但并不排除一个或多个其他特征、区域、整数、步骤、操作、元件、组件和/或组的存在或添加。
32.如本文所使用的,术语“远侧”是指当将装置导入患者体内时最远离医疗专业人员的一端,而术语“近侧”则是指当将装置导入患者体内时最接近医疗专业人员的一端。
33.一般参考本文使用的标记法和命名法,下面的详细描述的一个或多个部分可以按在计算机或计算机网络上执行的程序过程进行呈现。本领域的技术人员使用这些过程描述和表示来最有效地将其工作的实质传达给本领域的其他技术人员。过程在这里一般被认为是导致期望结果的一个自洽序列的操作。这些操作是需要对物理量进行物理操纵的那些操作。通常,尽管不一定地,这些量采用能够存储、传递、组合、比较和以其他方式进行操纵的电、磁或光信号的形式。有时,主要出于常用的原因,将这些信号称为位、值、元素、符号、字符、术语、数字等被证明是方便的。然而,应当注意,所有这些和类似的术语都将与适当的物理量相关联,并且只是应用于那些量的方便标签。
34.此外,这些操纵通常以诸如,添加或比较等的术语来指代,其通常与由人类操作员执行的心理操作相关联。然而,在大多数情况下,在本文所述的形成一个或多个实施例的一部分的操作中的任一个中,人类操作员的这种能力不是必需的或期望的。相反地,这些操作是机器操作。用于执行各种实施例的操作的有用机器包括如由计算机程序选择性激活或配置的通用数字计算机,根据本文的教导编写的计算机程序存储在里面;和/或包括专用为所需目的构造的设备。各种实施例还涉及用于执行这些操作的设备或系统。这些设备可以专门为所需的目的进行构造或者可以包括通用计算机。根据给出的描述,用于各种这些机器的所需结构将是显而易见的。
35.现在参考附图,其中相同的附图标记自始至终用于指代相同的元件。在以下描述中,为了解释的目的,阐述了许多具体细节以提供对其的透彻理解。然而,显而易见的是,可以在没有这些具体细节的情况下实践新颖的实施例。在其他情况下,众所周知的结构和装置以框图形式示出以便于对其进行描述。其意图是涵盖落在权利要求的范围内的所有修改、等同物和替代物。
36.图1示意性地示出了根据本文所述的本发明的在操作环境100中的医疗装置102的实施例的示例。在操作环境100中,医疗装置102可以包括柔性细长构件104和控制器106。柔性细长构件104包括工作通道组108、换能器组110和接头组112。控制器106包括细长构件界面114、处理器116、存储器118和用户界面120。在本文所述的一个或多个实施例中,医疗装置102的组件可以互操作以促进体腔内的插管过程,诸如经由多模态成像、接头控制和/或轨迹可视化进行。实施例不限于该上下文。应当理解,术语换能器在广义上使用并且旨在涵盖简单的传感器(输入换能器),除了传送图像(例如,不一定是致动器或输出换能器)之外,其也不生成能量信号。因此,本文中对换能器或换能器组的所有参考应当被理解为包括具有简单传感器和单独的能量源/能量生成组件的实施例以有助于检测特征或结构。
37.在实施例中,控制器106可以管理、监测和/或操作柔性细长构件104的一个或多个组件。在许多这样的实施例中,控制器106可以基于处理器116对存储在存储器118中的指令的执行来管理、监测和/或操作柔性细长构件104的一个或多个组件。在一个或多个实施例中,存储器118可以包括用于传送与柔性细长构件104的一个或多个组件相关联或由其生成
的信息的指令。在一个或多个实施例中,存储器118可以包括基于经由用户界面120接收的输入来使得能够控制柔性细长存储器104的一个或多个组件的指令。例如,经由换能器组110中的一个或多个换能器生成的图像可以经由用户界面120显示并且接头组112中的一个或多个接头可以基于所显示的图像使用经由用户界面120接收的输入进行操作。在一些实施例中,用户界面120可以利用增强现实和/或虚拟现实。例如,增强现实或虚拟现实可以用于显示用于柔性细长构件104的轨迹可视化。在各种实施例中,控制器106的一个或多个组件可以与关于图8所示和描述的一个或多个组件相同或相似。在各种诸类实施例中,控制器106可以另外地或替代地包括关于图8所示和描述的一个或多个组件。
38.在一些实施例中,柔性细长构件104可以用作用于在插管过程期间插入体腔中的独立装置。然而,在另外的或替代的实施例中,柔性细长构件104可以被配置为延伸通过另一个医疗装置(例如,十二指肠镜、内窥镜、输尿管镜、支气管镜、结肠镜、关节镜、膀胱镜、宫腔镜等)的工作通道。在各种实施例中,柔性细长构件104可以包括近侧部分/区域和远侧部分/区域。在各种这样的实施例中,远侧区域可以插入体腔中。在一个或多个实施例中,柔性细长构件104可以包括内窥镜、内窥镜附件工具、刀、插管、导管等的至少一部分。如以下将更详细描述的,诸如关于图2的,在实施例中,换能器组110和接头组112可以沿着柔性细长构件104的远侧部分设置。
39.在实施例中,工作通道组108可以包括一个或多个腔,其延伸通过柔性细长构件104的近侧和远侧部分的至少一部分。在几个这样的实施例中,组件可以延伸通过工作通道中的一个或多个以获得进入柔性细长构件104的远侧部分和/或其外部。例如,导丝可以延伸通过工作通道以控制接头的铰接。在另一个示例中,丝可以延伸通过工作通道以经由细长构件界面114通信地耦合换能器与控制器106。在一些实施例中,工作通道组108可以包括用于内部镜操作(例如,镜铰接)的通道和/或镜器械通道。
40.在实施例中,换能器组110可以包括一个或多个传感器、发射器、接收器、收发器、成像器、能量源(例如,激光、超声等)和/或灯以促进监测和/或控制柔性细长构件104和/或其环境(例如,插管过程的条件、方面或特征)。例如,换能器组110可以包括光学传感器、激光、超声收发器或探头或传感器、距离传感器、压力传感器、定位传感器、电磁传感器、电容传感器、电感传感器、压电传感器、光纤、灯、能量源(诸如用于诱导光声效应)、ph传感器、紫外传感器、红外传感器、光谱仪、温度传感器等中一个或多个,其可以生成和/或检测体内的信号,诸如超声波。在一些实施例中,柔性细长构件104的一个或多个部分可以是一次性的。
41.在各种实施例中,接头组112可以包括允许移动的两个主体之间的一个或多个连接。例如,接头组112可以包括动力接头、手动接头、铰接接头、伸缩接头、球囊接头、稳定接头、俯仰接头、偏航接头、翻滚接头、振动接头、致动器接头等中的一个或多个。接头组112可以包括一个或多个柔性部分,其连接柔性细长构件104的远侧顶端和柔性细长构件104的远端的近侧部分,使得远侧顶端可相关于近侧部分旋转或枢转或以其他方式定位或移动。例如,远侧顶端可以围绕基本上垂直于柔性细长构件104的纵向轴线的轴线旋转或枢转。在一些实施例中,远侧顶端可以沿着不平行于柔性细长构件104的纵向轴线的轴线旋转或枢转,使得远侧顶端不与柔性细长构件同轴。在实施例中,远侧顶端可以沿着纵向轴线延伸,例如,柔性部分可以扩张或压缩,因此远侧部分可以向远侧延伸和/或向近侧缩回至其松弛位置。柔性部分可由医疗专业人员手动操作,例如通过将工具或其他装置延伸通过工作通道
进行。
42.在一些实施例中,一个或多个柔性部分可以经由控制器和用户界面远程操作。在各种实施例中,接头组112,诸如包括多个柔性部分的,可以由控制器106自动操作。在各种这样的实施例中,接头组112可以由控制器106自动操作以将柔性细长构件104操纵至目标位置(例如,目标轨迹、成像位置、管道进入取向等)中。在一些实施例中,柔性细长构件104可以具有多个柔性部分,其可以独立地扩张/压缩以操纵/对齐柔性细长构件。例如,柔性细长构件104可以包括独立柔性部分的多个纵向贴片。在一些这样的示例中,多个纵向贴片可以围绕柔性细长构件104的圆周设置。在替代或另外的示例中,柔性细长构件104可以包括可以独立扩张和压缩的多个肋。
43.在一些实施例中,工作通道组108、换能器组110和接头组112中的一个或多个方面可以重叠。例如,换能器可以包括在接头或工作通道中。当换能器包括在接头中时,其可以测量在接头的不同端之间的取向。在另一种情况下,工作通道可以延伸通过和/或包括接头的一部分。在又一种情况下,换能器组110和/或接头组112中的一个或多个可以插入通过工作通道组108的工作通道中的一个或多个或设置在其中。在实施例中,接头组112中的一个或多个铰接接头可以被设计为铰接工作通道组108的一个或多个工作通道、换能器组110的一个或多个换能器和/或柔性细长构件104的一个或多个部分。在几个这样的实施例中,一个或多个铰接接头可以偏置/不对称以更准确地定位一个或多个工作通道和/或一个或多个换能器。例如,偏置接头可以在没有外力的情况下返回至预定角度(例如,180度)。在另一种情况下,不对称接头可以实现机械优势。
44.在实施例中,医疗装置102可以在对体腔,诸如十二指肠管或胆管进行插管之前和/或期间提供引导。在一个或多个实施例中,医疗装置102可以包括增强的超声能力以改进超声引导的插管。在各种实施例中,超声可以与一个或多个工作通道中的工具集成或集成到镜(例如,十二指肠镜)的设计中。在实施例中,医疗装置102可以使光学和超声图像能够同时被捕获。光学和超声图像可以融合在一起以创建乳头和十二指肠壁后面的解剖结构的图像。在各种实施例中,操作员可以能够在视图之间切换、同时查看(如果使用相机和光声成像,则时间与用于光声成像的照明脉冲和用于直接可视化的稳态复用),或者将不同图像重叠/融合在一起,或其组合,诸如经由用户界面120进行。在一些实施例中,除了或代替超声能力,医疗装置102可以包括增强的光声能力以改进光声引导的插管。在一些情况下,光声成像可以允许比标准超声成像更好或者甚至标准超声成像也许无法实现的组织或结构的区分(例如,胆管和胰管之间的区分)。在各种实施例中,光声能力可以与一个或多个工作通道中的工具集成或集成到镜(例如,十二指肠镜)的设计中。在实施例中,医疗装置102可以使光学和光声图像能够同时被捕获。光学和光声图像可以融合在一起以创建乳头和十二指肠壁后面的解剖结构的图像。在各种实施例中,操作员可能能够在光学和光声视图之间切换、同时查看光学和光声图像,或者将不同图像重叠/融合在一起,或其组合,诸如经由用户界面120进行。
45.在一些实施例中,在ercp手术期间,使用超声的术中引导可以改进管道插管。用直接可视化看到乳头,同时还能够看到(例如,经由超声进行)十二指肠壁后面的管道的能力可以更好地引导医疗专业人员进行镜和/或工具的对齐。提高插管过程的便利性,诸如管道插管和至胆管中目标位置的导航可以减少过程时间并且提高医疗专业人员执行该过程的
熟练度。这也可以减少意外胰管插管的次数,并且因此降低胰腺炎发生率。
46.在一个或多个实施例中,医疗装置102可以为医疗专业人员提供在十二指肠壁后面的胆管和胰管的视图(在这种情况下或ercp中)或在哪里刺穿壁以进入管道。在一些实施例中,超声换能器(参见例如,图2)可以集成到柔性细长构件104的顶端中以与体腔(例如,乳头附近的组织)的壁接触以生成超声图像(参见例如,图4a)。应当理解,超声换能器可以是光声传感器或探头(其可以被认为比标准超声换能器更简单,但却能够生成具有更高分辨率的图像),术语“超声换能器”和“换能器”在本文中被理解为包括这种光声传感器或探头作为标准超声换能器的替代品。光声传感器或探头可以用于检测由超出组织壁的光激发目标生成的声波,以及生成光激发目标的高分辨率/高对比度超声图像。在这样的实施例中,提供了能量源,诸如光源(例如,led、光纤、激光等)以生成具有足够能量的适当能量脉冲(例如,100v或更高)以激发目标组织(例如,超出换能器210-2所在的组织壁),以生成返回脉冲或回波(例如,在10mv的倍数范围内,并且在超声频率范围内,诸如,在10mhz的倍数范围内)。能量源可以是由第一换能器使用的相同光源(例如,用于相机或其他镜的光)或单独的激光或能够生成适当能量脉冲的其他能量源。可以使用在全光谱内的光。在一些实施例中,使用具有红色波长的光。能量源沿着柔性细长构件204的远侧部分204-2定位在被选择为生成足够的能量并且将其传播到目标部位以激发在目标部位处的组织的位置处。在一些实施例中,能量源与第一换能器210-1(例如,光源,诸如led或光纤或激光,以用于照亮由相机等观察到的路径)结合使用,并且可以用于为第一换能器210-1照明以及为采用光声传感器形式的第二换能器210-2生成激发能量(例如,脉冲能量,诸如脉冲光)的两个目的。用于光声成像的传感器(例如,仅接收的换能器)可能具有比标准超声换能器更精细的接收器电路,以接收和处理接收到的更精细的信号(与标准超声信号相比),并且生成具有比标准超声成像通常可以实现的更精细的分辨率以及增强的且更高的对比度的图像。
47.在一些这样的实施例中,可以操作一个或多个接头以使超声换能器与乳头附近的组织接触。在其他实施例中,体腔的一部分可以用流体填充以使得能够在不接触体腔壁的情况下生成超声图像(参见,例如,图5)。
48.在各种实施例中,组(例如,工作通道组108、换能器组110、接头组112)可以指代具有共同特征的一个或多个组件或其组合。例如,工作通道组108可以包括延伸通过柔性细长构件104的至少一部分的一个或多个工作通道。在另一个示例中,换能器组110可以包括一个或多个传感器,其用于测量和/或感测医疗装置102的各方面和/或医疗装置102的环境。在又一个示例中,接头组112可以指代一个或多个接头和/或接头机构,其促进柔性细长构件104的定位/操纵。
49.图2示意性地示出了根据本文所述的本发明的在环境200中的柔性细长构件204的示例。在一些实施例中,环境200可以包括一个或多个组件,其与本文所述的一个或多个其他组件相同或相似。例如,柔性细长构件204的远端可以与柔性细长构件104的远端相同或相似。在环境200中,柔性细长构件204可以包括近侧部分204-1和远侧部分204-2,以及延伸通过近侧和远侧部分204-1、204-2的至少一部分的工作通道208。在所示的实施例中,柔性细长构件204的远侧部分204-2包括换能器210-1、210-2和铰接接头212。远侧部分204-2可以被认为是包含具有近侧区域和远侧区域的柔性细长构件204的“远端”,换能器210-1通常位于近侧区域中,换能器210-2通常位于远侧区域中,其中最远端位于柔性细长构件204的
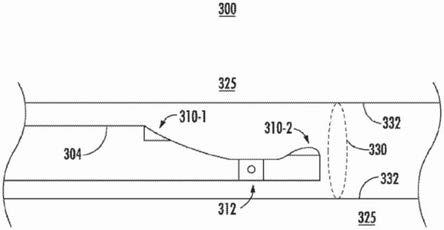
1、310-2也可以是如本文所述的其他传感器以促进ercp手术。在本文所述的一个或多个实施例中,铰接接头312可以用于将超声换能器310-2定位成与壁332接触以进行成像。例如,柔性细长构件304的远侧顶端可以是可旋转的、可枢转的、可定位的或以其他方式可移动的以与柔性细长构件304的纵向轴线不对齐。在实施例中,超声换能器310-2可以生成外部区域325中的结构的图像。实施例不限于该上下文。
55.在一些实施例中,接头组112中一个或多个接头的定位可以使超声换能器310-2能够定位成与体腔330壁332接触,同时允许光学传感器310-1保持在距体腔壁的最小距离处,以使得能够实现有效成像(例如,在体腔内的柔性细长构件204的视觉进展)。在一些实施例中,铰接接头312可以包括铰接和伸缩接头。在许多实施例中,柔性细长构件304可以包括一个或多个工作通道,然而,为简单起见,工作通道未在环境300中示出。例如,柔性细长构件304可以包括与图2的工作通道208相同或相似的工作通道。在一个或多个实施例中,铰接接头312可以包括升降器以使柔性细长构件304成角度以供进入。在许多这样的实施例中,升降器可以连接(例如,其远端)到在换能器312远侧的柔性细长构件304。在一些实施例中,可以在接近工作通道的出口处放置/连接升降器。在各种实施例中,医疗装置可以包括多个升降器。在各种这样的实施例中,一个或多个工作通道可以用于操作多个升降器。
56.实施例可以包括柔性细长构件304的组件的不同形态,诸如在铰接接头312、光学传感器310-1和超声换能器310-2中的两个或更多个之间的距离。在一些实施例中,超声换能器310-2到铰接接头312的距离可以是可变的。例如,超声换能器310-2和铰接接头312可以相关于光学传感器310-1是可移动的。在这样的实施例中,铰接接头312可以相关于柔性细长构件304纵向延伸。一个或多个实施例可以包括两个或更多个独立的铰接接头。在这样的实施例中,两个或更多个独立的铰接接头中的每一个可以沿着柔性细长构件304的长度在柔性细长构件304的一个或多个其他组件的近侧、之间和/或远侧设置。例如,柔性细长构件可以包括在工作通道远侧的一个铰接接头。在这样的示例中,操作员可以利用铰接接头来以超声换能器310-2抵靠体腔330壁332的角度量来调整工作通道的位置。
57.图4a和图4b示出了根据本文所述的本发明的在环境400a、400b中促进将换能器定位在选定的焦点区域内的实施例的示例。在一些实施例中,环境400a、400b可以包括一个或多个组件,其与本文所述的一个或多个其他组件相同或相似。例如,光学传感器410-1和超声换能器或传感器(在此可互换使用,但不旨在限制,如上所述)410-2可以包括在换能器组110中。环境400a包括具有柔性细长构件404的医疗装置402的远端,柔性细长构件404包括工作通道408-1、408-2、光学传感器410-1、延伸通过工作通道408-2的超声换能器410-2、铰接接头412、换能器构件417和延伸通过工作通道408-1的张紧器435。环境400b包括柔性细长构件404,其包括具有焦点区域440的光学传感器410-1和超声换能器410-2。在一个或多个实施例中,张紧器435可以操作铰接接头412以适当地定位超声换能器410-2,诸如重叠光学传感器410-1的焦点区域与超声换能器410-2的焦点区域。实施例不限于该上下文。
58.在几个实施例中,张紧器435的远端可以联接到换能器构件417。在几个这样的实施例中,张紧器435的远端可以联接在铰接接头412的至少一部分和超声换能器410-2的至少一部分之间。在一些实施例中,张紧器435可以包括升降器。在各种实施例中,铰接接头412可以包括医疗装置的组件的柔性部分。例如,超声换能器410-2可以包括在导管,诸如超声导管中,插入通过柔性细长构件404的工作通道408-2。在许多实施例中,柔性细长构件
404可以包括内窥镜或与内窥镜结合使用。在一些实施例中,光学传感器410-1设置在柔性细长构件404的主体(例如,内窥镜、十二指肠镜等)上,并且超声换能器410-2设置在通过柔性细长构件404的工作通道的单独的、较小的柔性细长构件(例如,内窥镜超声导管)上。在一个或多个实施例中,张紧器435可以选择性地附接到换能器构件417。应当理解,在与设置有第一换能器410-1的主柔性细长构件分开的柔性细长构件上设置超声换能器410-2可以允许超声换能器410-2的增加的移动性和增强的定位能力,以优化其相对于目标组织的定位,以及随之发生的改进的信号接收/传输和提高的对比度以进行可视化,以及可能简化的制造和伴随的成本降低。
59.在一个或多个实施例中,医疗装置402可以包括附加铰接接头,其在一些实施例中,是彼此独立的。例如,铰接接头可以被配置为延伸/缩回换能器构件417。在一些这样的示例中,铰接接头可以设置在工作通道408-2中。在替代或另外的示例中,铰接接头可以被配置为延伸/缩回张紧器435。在一些这样的示例中,铰接接头可以设置在工作通道408-1中。在许多实施例中,可以选择医疗装置的一个或多个特征以相关于彼此适当地定位医疗装置404的不同组件。例如,可以至少部分地基于铰接接头412和/或换能器构件417的柔性来选择距换能器410-2和换能器410-2的距离。在一些实施例中,铰接接头412可以包括换能器构件417的一部分,其比换能器构件417的一个或多个其他部分具有更大的柔性。在一些实施例中,铰接被设计为铰接工作通道408-1、换能器410-2或两者。在铰接工作通道408-1和换能器410-2两者的一些实施例中,铰接接头可以偏置/不对称以优化工作通道408-1和换能器410-2的位置(包括其相对位置)。
60.在一些实施例中,柔性细长构件404可以包括双通道ercp镜的一个或多个部分,双通道ercp镜具有用于包括超声换能器410-2的超声导管的直通腔和/或具有升降器的侧离开通道以控制工具方向。在一些实施例中,超声导管的使用可以使柔性细长构件404能够是一次性的。在这样的实施例中,超声导管可以另外地或替代地是一次性的。在一个或多个实施例中,柔性细长构件404可以包括十二指肠镜的一个或多个部分。在各种实施例中,导管超声传感器的使用可以允许光学传感器410-1和超声换能器410-2之间的可变距离。在一个或多个实施例中,超声换能器410-2可以具有单个铰接轴线(如括约肌切开器)以促进与十二指肠壁实现期望的接触。在一些实施例中,超声探头可以是修改的进入和输送导管,诸如用于波士顿科学公司销售的直接可视化系统中,改装的以用于光声成像。在图4b所示的实施例中,为简单起见未示出工作通道408-1、408-2。
61.图5示出了根据本文所述的本发明的在操作环境500中的柔性细长构件504的远端的实施例的一个示例。尽管在环境500中,柔性细长构件504设置在十二指肠530内,但是应当理解,柔性细长构件504可以在不脱离本发明的范围的情况下用于其他环境中。在一些实施例中,环境500可以包括一个或多个组件,其与本文所述的一个或多个其他组件相同或相似。例如,球囊512-1、512-2可以包括在接头组112中。环境500可以包括具有十二指肠壁532的十二指肠530和设置在其中的柔性细长构件504。此外,乳头542被示为十二指肠壁532的特性,并且乳头542包括通向胆管526和胰管528的共同进入点。在所示的实施例中,柔性细长构件504的远端包括超声换能器510-1和球囊512-1、512-2。实施例不限于该上下文。
62.在一个或多个实施例中,球囊512-1、512-2(或球囊512)可以被操作以在十二指肠530内生成密封区域以创建流体填充区域544。在一个或多个这样的实施例中,流体填充区
域544可以使超声换能器510-1能够生成在十二指肠530外部的结构,诸如胆管526和/或胰管528的结构的图像。在各种实施例中,球囊512可以独立操作。在几个实施例中,球囊中的每一个可以包括铰接接头。在一些实施例中,通过充胀/缩放球囊512以避免接触乳头542和/或十二指肠壁532来用超声换能器510-1生成图像可以降低引起刺激或炎症的风险。
63.在各种实施例中,柔性细长构件504可以包括一个或多个腔(例如,工作通道),以用于充胀/缩放球囊512。例如,流体可以经由腔中的一个或多个进行添加和从球囊进行移除。在一些实施例中,至少一个腔可以使流体能够进行添加或从流体填充区域544进行移除。在一些实施例中,球囊512和流体填充区域544可以填充有不同的流体。在几个实施例中,柔性细长构件可以包括流体通道,其具有设置在第一球囊和第二球囊之间的出口,以用流体填充在第一和第二球囊之间的体腔的区域以促进生成包括在体腔壁外部的特征的第二图像。
64.图6a至图6f示出了根据本文所述的本发明的在环境600a-f中进行成像和轨迹可视化的实施例。尽管在图6a至图6f中柔性细长构件604分别设置在十二指肠630内,但是应当理解,在不脱离本发明的范围的情况下,柔性细长构件604可以用于其他环境中。图6c和图6f示出了可定位在患者的解剖结构内以执行ercp手术的医疗装置,诸如柔性细长构件(例如,十二指肠镜)的远端。图6a至图6b和图6d至图6e示出了从柔性细长构件上的成像装置6xx投射的并且显示在用户界面上以供医疗专业人员对乳头进行插管的图像。应当理解,柔性细长构件604-1、604-2可以与柔性细长构件104、204、304、404、504中的一个或多个相同或相似。环境600a-600f说明了不同的选定的解剖结构。环境600a-600c包括柔性细长构件604-1、十二指肠630-1、十二指肠壁632-1、乳头642-1、胆管626-1、胰管628-1、光源634-1、目标轨迹可视化646-1和实际轨迹可视化648-1。环境600d-600f包括柔性细长构件604-2、十二指肠630-2、十二指肠壁632-2、乳头642-2、胆管626-2、胰管628-2、光源634-2、胆管轨迹可视化646-2和胰管轨迹可视化648-2。实施例不限于该上下文。
65.在本文描述的一个或多个实施例中,关于图6a至图6e描述的一个或多个特征、组件和/或技术,诸如与成像相关的过程可以经由控制器106来实施。在实施例中,这些特征、组件和/或技术可以包括以下中的一项或多项。来自相机的视觉反馈可以用于自动化和/或引导柔性细长构件604-1、604-2以提供改进的成像(例如,多模态成像)。更一般地,本文描述的任何技术或组件可以用于自动化和/或引导一个或多个其他组件的操作。一个或多个换能器,诸如超声传感器,可以集成到柔性细长构件604-1、604-2中。超声传感器可以用于提供声辐射力脉冲弹性成像。可以经由超声使用诸如弹性成像和/或多普勒成像等技术来提供附加信息,诸如更高密度的质量和可视化流体流,以帮助识别适当的管道以进行插管。可以利用直接和/或间接超声和/或光声能力。术中超声和/或光声成像可以用于图像融合。
66.多模态成像还可以包括图像融合。例如,可以将来自光学传感器和超声换能器的输入融合在一起,以提供更多的相关信息以协助插管。在这样的情况下,可以诸如经由用户界面120提供乳头的直接可视化的图片,其中在十二指肠壁上勾勒出了管道,这可以为操作员提供关于轨迹/接近更好的想法。
67.参考环境600a-600c,在实施例中,目标轨迹可视化646-1可以说明用于相应装置(例如,内窥镜、导管、柔性细长构件604-1)的目标攻角,并且实际轨迹可视化648-1可以基于实际定位说明用于相应装置(例如,内窥镜、导管、柔性细长构件604-1)的当前角度。在几
个这样的实施例中,操作员可以将实际轨迹可视化648-1与目标轨迹可视化646-1对齐以适当地定位柔性细长构件604-1。
68.在几个实施例中,控制器106可以显示来自柔性细长构件604-1、604-2上的相机的图像(参见图6a至图6b、图6d至图6e),并且为医疗专业人员检测和识别乳头642-1。控制器106可以基于乳头642-1的图像确定目标轨迹646-1,并且覆盖在图像上以向医疗专业人员提供直视插管路径。在实施例中,可以通过柔性细长构件604-1、604-2上的超声传感器获得超声图像以确定胰管和/或胆管的图像以生成目标轨迹646-1。一旦识别出乳头642-1和/或目标轨迹646-1,控制器106就可以确定从柔性细长构件604-1、604-2延伸的工具的当前轨迹,并且覆盖轨迹648-1。即,控制器106可以为医疗专业人员显示图像以更好地对齐柔性细长构件604-1的远端,使得当前轨迹和目标轨迹646-1、648-1在乳头642-1的图像上基本上彼此对齐,以改进插管并且可能减少失败的尝试。替代地或另外地,控制器106可以为医疗专业人员显示图像,以更好地对齐柔性细长构件604-2的远端与胆管和胰管中的一个,以改进插管并且可能减少失败的尝试。
69.在实施例中,可以使用具有期望波长的激光或光(例如,来自光源634-1、634-5的)以基于定位(例如,目标轨迹可视化646-1)为装置投射目标攻角。在一些实施例中,激光/光(例如,光源634-1)可以显示用于柔性细长构件604-1(例如,实际轨迹可视化648-1)的顶端的朝向和/或方向。在实施例中,目标轨迹646-1和实际轨迹648-1都可显示在乳头642-1的图像上,使得医疗专业人员可以实时查看和对齐柔性细长构件。在一些这样的实施例中,当柔性细长构件在十二指肠中移动时,朝向和/或方向可以通知操作员柔性细长构件的远端的当前轨迹。
70.在许多实施例中,激光可以用于显示最佳接近角,诸如由操作员设置的或基于成像输入(例如,来自集成到柔性细长构件604-1中的超声)自动设置的,以随后朝向管道引导移动并且将移动引入管道中(例如,胆管626-1)。最佳接近角可以被示为管道的解剖结构的延伸,诸如根据超声或光声成像确定的,以协助基于选定的解剖结构进行适当的对齐。在各种实施例中,目标轨迹可视化646-1和/或实际轨迹可视化648-1可以由软件而不是激光/光来生成。
71.参考环境600d-600f,在一些实施例中,胰管轨迹可视化648-2可以包括胰管628-2的进入点指示和/或轮廓,并且胆管轨迹可视化646-2可以包括胆管626-2的进入点指示和/或轮廓。在各种实施例中,附加传感器、扩展图像和/或轨迹可视化可以协助插管。在实施例中,光源634-2中的一个或多个可以包括激光。在一些实施例中,轨迹可视化646-2、648-2中的一个或多个可以由软件而不是光源生成。
72.实施例可以包括扩展图像覆盖。例如,工作通道中的镜或其他ercp器械的图像可以虚拟地放置在经由用户界面呈现的图像(例如,光学图像)上。在这样的示例中,这可以协助导航至胆管。在实施例中,信息可以从换能器进行集成以叠加在经由用户界面呈现的图像上。在这样的实施例中,可以执行适当的转化以使得能够进行光学不可见图像的可视化(例如,重新着色、重新缩放等)。该信息可以提供准确的位置信息和/或协助导航。在一些实施例中,可以生成预期或期望工具将到达的位置的重像。
73.在一个或多个实施例中,轨迹可以是固定的,使得所示的初始轨迹保持恒定,诸如在整个校准过程中。在这样的实施例中,可以基于确定至管道中的最佳角度来固定轨迹。在
实施例中,轨迹可视化可以是自适应的,使得传感器、成像和/或用户输入可以用于更新用于插管的最佳轨迹。例如,操作员可以基于轨迹可视化将导管缓慢地移向管道并且移入管道中。可以使用测量和逐步接近,其中,在小幅移动后,传感器进入周围环境并且在必要时调整轨迹和提供反馈。反馈可以是视觉的,从而向操作员显示在何处/与什么对齐。
74.在一些实施例中,反馈可以是数字的和/或方向的。在一些这样的实施例中,可以执行适当的移动以校正值/反馈,诸如由控制器106自动执行。在各种实施例中,轨迹可以用作补充信息。在实施例中,当已经到达某个区域或目标组织时,可以生成反馈,诸如视觉、触觉和/或听觉的。在一些实施例中,当已经到达某个区域或目标组织时,可以生成反馈,诸如视觉、触觉和/或听觉的。
75.在实施例中,换能器可以包括和/或促进位置跟踪/信息,诸如用超声成像和/或多模态成像以基于一个或多个2d图像生成选定的解剖结构的三维图。在一些实施例中,定位传感器可以提供用于构建选定解剖结构的图的第三维度。
76.图7a至图7c示出了根据本文描述的一个或多个实施例的环境700a、700b、700c中的柔性细长构件的各种实施例。在一些实施例中,环境700a、700b、700c可以包括与本文描述的一个或多个其他组件相同或相似的一个或多个组件。例如,柔性细长构件704-1可以与柔性细长构件104、204、304、404、504、604-1、604-2中的一个或多个相同或相似。环境700a包括具有柔性细长构件704-1、铰接接头712-1、换能器710-1和换能器构件717-1的医疗装置702-1的远端。环境700b包括具有柔性细长构件704-2、铰接接头712-2、712-3、换能器710-2和换能器构件717-2的医疗装置702-2。环境700c包括具有柔性细长构件704-3、铰接接头712-4、伸缩接头712-5、换能器710-1和换能器构件717-3的医疗装置702-3。在本文描述的一个或多个实施例中,可以利用机械振动和/或移动来协助插管。在一些实施例中,诸如前后或左右的小运动/运动可以用于协助操纵,诸如在插管过程期间。在一些这样的实施例中,小移动/运动可以是自动化的。实施例不限于该上下文。
77.在环境700a中,铰接接头712-1可以使换能器710-1相对于医疗装置702-1的至少一部分,诸如换能器构件717-1的一部分径向移位。在环境700b中,铰接接头712-2、712-3可以使换能器710-2围绕医疗装置702-2的相应部分,诸如换能器构件717-2的相应部分径向移位。在环境700c中,铰接接头712-4可以使换能器710-3相对于医疗装置702-1的至少一部分,诸如换能器构件717-3的一部分径向移位,并且伸缩接头712-5可以相关于换能器构件717-3纵向延伸/缩回换能器710-3。
78.图8示出了可能适于如之前所述实施各种实施例的计算架构800的实施例。在各种实施例中,计算架构800可以包括或被实施为电子装置和/或医疗装置的一部分。在一些实施例中,计算架构800可以代表例如,本文所述的一个或多个组件。在一些实施例中,计算架构800可以代表,例如实施或利用本文描述的组件和/或技术的一个或多个部分的计算装置,诸如医疗装置102、控制器106、换能器组110中的一个或多个、接头组112中的一个或多个、细长构件界面114、处理器116、存储器118和/或用户界面120。实施例不限于该上下文。
79.如在本技术中使用的,术语“系统”和“组件”以及“模块”可以指代与计算机相关的实体,硬件、硬件和软件的组合、软件或执行中的软件,其示例是由本文公开的计算架构800的说明性示例提供的。例如,组件可以是但不限于在处理器上运行的进程、处理器、硬盘驱动器、多个存储驱动器(光和/或磁存储介质的)、对象、可执行文件、执行线程、程序和/或计
算机。作为说明,在控制器106上运行的应用和控制器106都可以是组件。一个或多个组件可以驻留在进程和/或执行线程中,并且组件可以位于一个计算机上和/或分布在两个或更多个计算机之间。此外,组件可以通过各种类型的通信介质彼此通信耦合以协调操作。协调可能涉及信息的单向或双向交换。例如,组件可以以通过通信介质传达的信号的形式传达信息。该信息可以被实施为分配给各种信号线的信号。在这种分配中,每条消息都是一个信号。然而,另外的实施例可以替代地采用数据消息。这样的数据消息可以跨各种连接发送。连接的示例包括并行接口、串行接口和总线接口。
80.计算架构800包括各种常见的计算元件,诸如一个或多个处理器、多核处理器、协处理器、存储器单元、芯片组、控制器、外围设备、接口、振荡器、定时装置、视频卡、音频卡、多媒体输入/输出(i/o)组件、电源等。然而,实施例不限于由计算架构800实施。
81.如图8所示,计算架构800包括处理单元804、系统存储器806和系统总线808。处理单元804可以是各种市售处理器中的任一个,包括但不限于和处理器;应用、嵌入式和安全处理器;和和处理器;ibm和cell处理器;core(2)core(2)和处理器;和类似的处理器。双微处理器、多核处理器和其他多处理器架构也可以用作处理单元804。
82.系统总线808向处理单元804提供用于系统组件,包括但不限于系统存储器806的接口。系统总线808可以是几种类型的总线结构中的任一种,其还可以使用各种商业可用总线架构中的任一种互连到存储器总线(具有或不具有存储器控制器)、外围总线和本地总线。接口适配器可以经由狭槽架构连接到系统总线808。示例狭槽架构可以包括但不限于加速图形端口(agp)、卡总线、(扩展)工业标准架构((e)isa)、微通道架构(mca)、网络用户总线、外围组件互连(扩展)(pci(x))、pci express、个人计算机存储卡国际协会(pcmcia)等。
83.系统存储器806可以包括采用一个或多个高速存储器单元,诸如只读存储器(rom)、随机存取存储器(ram)、动态ram(dram)、双倍数据速率dram(ddram)、同步dram(sdram)、静态ram(sram)、可编程rom(prom)、可擦可编程rom(eprom)、电可擦可编程rom(eeprom)、闪存(例如,一个或多个闪存阵列)、聚合物存储器,诸如铁电聚合物存储器、奥氏存储器、相变或铁电存储器、硅-氧化物-氮化物-氧化物-硅型(sonos)存储器、磁卡或光卡、装置阵列,诸如独立磁盘冗余阵列(raid)驱动器、固态存储器装置(例如,usb存储器、固态驱动器(ssd)和任何其他类型的适于存储信息的存储介质)的形式的各种类型的计算机可读存储介质。在图8所示的实施例中,系统存储器806可以包括非易失性存储器810和/或易失性存储器812。在一些实施例中,系统存储器806可以包括主存储器。基本输入/输出系统(bios)可以存储在非易失性存储器810中。
84.计算机802可以包括采用一个或多个低速存储器单元,包括内部(或外部)硬盘驱动器(hdd)814、用于从或向可移动磁盘818读取或写入的磁软盘驱动器(fdd)816和用于从或向可移动光盘822读取或写入的光盘驱动器820(例如,cd-rom或dvd)的形式的各种类型的计算机可读存储介质。hdd 814、fdd 816和光盘驱动器820可以分别经由hdd接口824、fdd接口826和光驱接口828连接到系统总线808。用于外部驱动器实施方案的hdd接口824可以包括通用串行总线(usb)和电气和电子工程师协会(ieee)994接口技术中的至少一种或两
种。在各种实施例中,这些类型的存储器可以不包括在主存储器或系统存储器中。
85.驱动器和相关联的计算机可读介质提供数据、数据结构、计算机可执行指令等的易失性和/或非易失性存储装置。例如,多个程序模块可以存储在驱动器和存储器单元810、812,包括操作系统830、一个或多个应用程序832、其他程序模块834和程序数据836中。在一个实施例中,一个或多个应用程序832、其他程序模块834和程序数据836可以包括或实施,例如,本文所述的各种技术、应用和/或组件。
86.用户可以通过一个或多个有线/无线输入装置,例如键盘838和定点装置,诸如鼠标840将命令和信息输入计算机802中。其他输入装置可以包括麦克风、红外线(ir)遥控器、射频(rf)遥控器、游戏手柄、触控笔、读卡器、软件狗、指纹读取器、手套、绘图板、操纵杆、键盘、视网膜阅读器、触摸屏(例如,电容式、电阻式等)、轨迹球、触控板、传感器、手写笔等。这些和其他输入装置经常通过联接到系统总线808的输入装置接口842连接到处理单元804,但也可以通过其他接口,诸如并行端口、ieee串行端口、游戏端口、usb端口、ir接口等连接。
87.监测器844或其他类型的显示装置也经由接口,诸如视频适配器846连接到系统总线808。监测器844可以在计算机802的内部或外部。除了监测器844之外,计算机通常包括其他外围输出装置,诸如扬声器、打印机等。
88.计算机802可以使用经由至一个或多个远程计算机,诸如远程计算机848的有线和/或无线通信的逻辑连接在联网环境中进行操作。在各种实施例中,本文所述的一个或多个交互可以经由联网环境发生。远程计算机848可以是工作站、服务器计算机、路由器、个人计算机、便携式计算机、基于微处理器的娱乐设备、对等装置或其他公共网络节点,并且通常包括相对于计算机802描述的许多或所有元件,但是为了简洁起见,仅示出了存储器/存储装置850。所描绘的逻辑连接包括至局域网(lan)852和/或更大的网络,例如广域网(wan)854的有线/无线连接性。这种lan和wan联网环境在办公室和公司中很常见,并且促进了企业范围的计算机网络,诸如企业内部网,所有这些都可以连接到全球通信网络,诸如,互联网。
89.当在lan联网环境中使用时,计算机802通过有线和/或无线通信网络接口或适配器856连接到lan 852。适配器856可以促进至lan 852的有线和/或无线通信,lan 852还可以包括设置在其上的无线接入点,以用于与适配器856的无线功能通信。
90.当在wan联网环境中使用时,计算机802可以包括调制解调器858,或者连接到wan 854上的通信服务器,或者具有用于通过wan 854,诸如通过互联网建立通信的其他装置。可以是内部的或外部的以及有线和/或无线装置的调制解调器858经由输入装置接口842连接到系统总线808。在联网环境中,相对于计算机802所描绘的程序模块或其部分可以存储在远程存储器/存储装置850中。应当理解,所示的网络连接是说明性示例,并且可以使用在计算机之间建立通信链路的其他装置。
91.计算机802可操作以使用ieee 802标准族与有线和无线装置或实体,诸如可操作地设置在无线通信(例如,ieee 802.16空中调制技术)中的无线装置进行通信。这至少包括wi-fi(或无线保真)、wimax和蓝牙
tm
无线技术等。因此,通信可以是与传统网络一样的预定义结构,或者只是至少两个装置之间的自组织通信。wi-fi网络使用称为ieee 802.11x(a、b、g、n等)的无线电技术来提供安全、可靠、快速的无线连接性。wi-fi网络可以用于将计算机相互连接、连接到互联网以及连接到有线网络(使用ieee 802.3相关的介质和功能)。
92.可以使用硬件元件、软件元件或两者的组合来实施各种实施例。硬件元件的示例可以包括处理器、微处理器、电路、电路元件(例如,晶体管、电阻器、电容器、电感器等)、集成电路、专用集成电路(asic)、可编程逻辑装置(pld)、数字信号处理器(dsp)、现场可编程门阵列(fpga)、逻辑门、寄存器、半导体装置、芯片、微芯片、芯片组等。软件的示例可以包括软件组件、程序、应用、计算机程序、应用程序、系统程序、机器程序、操作系统软件、中间件、固件、软件模块、例程、子例程、功能、方法、过程、软件接口、应用程序接口(api)、指令集、计算代码、计算机代码、代码段、计算机代码段、字、值、符号或其任何组合。确定是否使用硬件元件和/或软件元件来实施实施例可以根据任意数量的因素,诸如期望的计算速率、功率水平、耐热性、处理周期预算、输入数据速率、输出数据速率、存储器资源、数据总线速度和其他设计或性能约束。
93.至少一个实施例的一个或多个方面可以通过存储在机器可读介质上的相应指令来实施,该指令表示在处理器内的各种逻辑,当由机器读取时,指令使机器制造逻辑以执行本文所述的技术。这种被称为“ip核”的表示可以存储在有形的机器可读介质上,并且供应给各种客户或制造设施,以加载至实际制作逻辑的制造机器或处理器中。一些实施例可以例如,使用可以存储指令或指令集的机器可读介质或物品来实施,如果由机器执行,指令则可以使机器根据实施例来执行方法和/或操作。这样的机器可以包括例如,任何合适的处理平台、计算平台、计算装置、处理装置、计算系统、处理系统、计算机、处理器等,并且可以使用任何合适的硬件和/或软件组合来实施。机器可读介质或物品可以包括,例如任何合适类型的存储器单元、存储器装置、存储器物品、存储器介质、存储装置、存储物品、存储介质和/或存储单元,例如存储器、可移除或不可移除介质、可擦除或不可擦除介质、可写或可重写介质、数字或模拟介质、硬盘、软盘、光盘只读存储器(cd-rom)、可刻录光盘(cd-r)、可重写光盘(cd-rw)、光盘、磁介质、磁光介质、可移除存储卡或磁盘、各种类型的数字多功能盘(dvd)、磁带、盒式磁带等。指令可以包括使用任何合适的高级、低级、面向对象的、视觉、编译和/或解释的编程语言实施的任何合适类型的代码,诸如源代码、编译代码、解释代码、可执行代码、静态代码、动态代码、加密代码等。
94.根据本发明,能够在不需要过多实验的情况下制造和执行在本文中公开且要求保护的所有装置和/或方法。虽然已经以优选实施例描述了本发明的装置和方法,但对于本领域的技术人员来说显而易见的是,在不脱离本发明的概念、精神和范围的情况下,能够对该装置和/或方法和在本文所述的方法的步骤中或在步骤的序列中施加变化。对于本领域的技术人员来说显而易见的所有这样的类似替代和修改被认为是在由所附权利要求限定的本发明的精神、范围和概念内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1