血管装置插入系统和设备的制作方法
血管装置插入系统和设备
相关申请的交叉引用
1.无。
技术领域
2.本发明涉及血管介入装置,并且更特别是涉及血管装置插入系统和设备。
背景技术:
3.一些血管手术需要在血管中放置导丝作为血管手术中的初始步骤。然而,有时医生可能难以手动操纵导丝通过血管,例如在血管部分地或完全地闭塞的区域中。
4.本领域需要可用于帮助在血管中插入和放置导丝和/或血管导管的血管装置插入系统和设备。
技术实现要素:
5.本发明提供了可用于帮助在血管中插入和放置导丝和/或血管导管的血管装置插入系统和设备。
6.在一种形式中,本发明致力于一种血管装置插入系统。该系统包括支撑导管、容纳马达的插入模块壳体和马达控制器。支撑导管具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。马达具有沿纵向轴线布置的中空马达轴。中空马达轴具有近侧端、远侧端、远侧端部分和从近侧端沿纵向轴线延伸到远侧端的细长开口。中空马达轴的远侧端部分被构造成联接到支撑导管的座部。中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。马达控制器电联接到马达。马达控制器被构造成控制马达以使中空马达轴绕纵向轴线旋转振荡并且进而使支撑导管旋转振荡。
7.在另一种形式中,本发明致力于一种血管装置插入系统。该系统包括支撑导管、容纳马达的插入模块壳体、导丝和马达控制器。支撑导管具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。马达具有沿纵向轴线布置的中空马达轴。中空马达轴具有近侧端、远侧端、远侧端部分和从近侧端沿纵向轴线延伸到远侧端的细长开口。中空马达轴的远侧端部分被构造成联接到支撑导管的座部。中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。导丝具有第一端和第二端。导丝定位在由在中空马达轴中的细长开口和支撑导管的导管内腔限定的连续通道中,其中导丝的第一端部分靠近中空马达轴的近侧端。连续通道被构造成使得通过手动操纵导丝的第一端部分,导丝可在连续通道中自由手动运动。马达控制器电联接到马达。马达控制器被构造成使中空马达轴绕纵向轴线旋转振荡,以便进而使支撑导管旋转振荡。
8.在又一种形式中,本发明致力于一种用于在血管中推进支撑导管和导丝的血管装置插入设备。支撑导管具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。该血管装置插入设备包括插入模块壳体,插入模块壳体被构造成容纳马达,马达具有沿纵向轴线布置的中空马达轴。中空马达轴具有近侧端、远侧端、远
侧端部分和从近侧端沿纵向轴线延伸到远侧端的细长开口。中空马达轴的远侧端部分被构造成联接到支撑导管的座部。中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。连续通道被构造成接收导丝。马达控制器电联接到马达。马达控制器被构造成使中空马达轴绕纵向轴线旋转振荡,以便进而使支撑导管旋转振荡。
9.本发明的一个优点是由马达轴提供给支撑导管的旋转振荡帮助纵向地推进导丝通过血管中的闭塞部。
10.本发明的另一个优点是纵向往复运动可以与旋转振荡同时施加到马达,从而使支撑导管在血管中既纵向往复运动又旋转振荡。
附图说明
11.通过参考以下结合附图对本发明的实施例的描述,本发明的上述和其他特征和优点以及实现它们的方式将变得更加明显,并且本发明将更好地得到理解,其中:
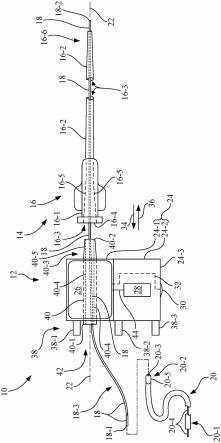
12.图1是本发明的血管装置插入系统的示意图,其包括血管装置插入设备和可用于帮助插入和放置导丝和/或血管导管的支撑导管;和
13.图2是图1的血管装置插入系统的示意图,其包括可与图1的血管装置插入设备和支撑导管结合使用并联接到该血管装置插入设备和支撑导管的超声系统。
14.对应的附图标记在若干视图中指示对应的部分。在此列出的示例说明了本发明的至少一个实施例,并且这种示例不应被解释为以任何方式限制本发明的范围。
具体实施方式
15.现在参考附图,并且更特别是参考图1,显示了血管装置插入系统10,其通常包括血管装置插入设备12和血管装置14。血管装置14可以是例如支撑导管16,并且其可以伴随有导丝18和/或血管导管、例如超声导管20。在图1中,血管装置14和支撑导管16沿纵向轴线22布置。
16.支撑导管16包括座部16-1和从座部16-1向远侧延伸的柔性细长构件16-2。导管内腔16-3延伸通过座部16-1和柔性细长构件16-2、即通过支撑导管16的整个长度。座部16-1包括安装孔16-4,该安装孔形成导管内腔16-3的近侧部分。座部16-1的安装孔16-4具有的直径相对于导管内腔16-3的其余部分的直径扩大,并且在本实施例中,座部16-1的安装孔16-4具有向远侧延伸的内锥形部16-5(例如,截头圆锥形的)。柔性细长构件16-2具有远侧端部分16-6。
17.导丝18具有第一端18-1和第二端18-2。导丝18是本领域已知的典型导丝,并且可以是例如柔性金属线或丝,例如镍钛诺丝或线。
18.在图1的实施例中,在本实施例中为超声导管20的血管导管具有导管近侧部分20-1、导管远侧部分20-2和导丝内腔20-3。导丝内腔20-3例如在尺寸和形状方面被构造成接收导丝18,使得血管导管、例如超声导管20可以通过在导丝18上沿远侧方向36推进血管导管而被引导至关注的区域。在本实施例中,超声导管20可包括芯线20-4,该芯线被构造成将振动能量传递到在导管远侧部分20-2处的工作头20-5。
19.血管装置插入设备12包括插入模块壳体24、马达26、马达控制器28和滑动器30。马达26和马达控制器28可以是电池操作的,并且电池可以被容纳在插入模块壳体24中。
20.插入模块壳体24包括马达壳体24-1和基部壳体24-2。插入模块壳体24的马达壳体24-1可以包括容纳和安装马达26的腔室。插入模块壳体24的基部壳体24-2可以包括容纳和安装马达控制器28的腔室。
21.例如通过导轨,马达26可滑动地安装到插入模块壳体24的马达壳体24-1,使得马达26可相对于插入模块壳体24沿纵向轴线22纵向运动。滑动器30可以安装到插入模块壳体24的侧壁24-3。滑动器30通过连杆32连接到马达26,使得滑动器30沿近侧方向34或远侧方向36的纵向运动引起马达26沿近侧方向34或远侧方向36的对应纵向运动。换句话说,滑动器30被构造成,通过滑动器30相对于插入模块壳体24的往复侧向运动,使马达26沿纵向轴线22纵向往复运动、即沿近侧方向34和远侧方向36交替运动。
22.插入模块壳体24还可以包括用于连接到辅助装置的多个安装特征38,如图2所示。在本实施例中,多个安装特征38可以被构造和布置为一组向近侧延伸的柱,并且多个安装特征38可以是磁性的。在本实施例中,多个安装特征38的各个安装特征被标识为安装特征38-1、安装特征38-2和安装特征38-3。
23.马达26可以是例如直流马达、例如步进马达。马达26具有沿纵向轴线22布置的中空马达轴40。中空马达轴40具有近侧端40-1、远侧端40-2、远侧端部分40-3和细长开口40-4。细长开口40-4沿纵向轴线22从近侧端40-1延伸到远侧端40-2。换句话说,细长开口40-4延伸通过中空马达轴40的整个长度。在本实施例中,例如,细长开口40-4可以具有穿过中空马达轴40的整个长度的圆柱体形状。
24.中空马达轴40的远侧端部分40-3被构造成联接到支撑导管16的座部16-1。在本实施例中,中空马达轴40具有向远侧延伸的外锥形部40-5,其在尺寸和形状方面适于以摩擦配合的方式接合支撑导管16的座部16-1的向远侧延伸的内锥形部16-5,以便将马达26的中空马达轴40可释放地连接到支撑导管16的座部16-1。
25.当中空马达轴40的远侧端部分40-3联接到支撑导管16的座部16-1时,则中空马达轴40的细长开口40-4和支撑导管16的导管内腔16-3共同限定连续通道42,该连续通道纵向延伸通过支撑导管16和马达26的中空马达轴40的组合。导丝18可以定位在由在中空马达轴40中的细长开口40-4和支撑导管16的导管内腔16-3限定的连续通道42中,例如被推进通过该连续通道,其中导丝18的第一端部分18-3靠近中空马达轴40的近侧端40-1。连续通道42例如在尺寸和形状方面被构造成使得,通过手动操纵导丝18的第一端部分18-3,导丝18可以例如纵向地在连续通道42中自由运动,使得导丝18的第二端18-2可以从支持导管16的远侧端部分16-6向远侧延伸。如本文所用,术语“可自由运动”是指遇到非实质性的运动阻力,其中实质性的阻力将导致纵向运动的构件屈曲或弯曲。
26.作为导丝18的替代或补充,血管导管、例如超声导管20可定位在由在中空马达轴40中的细长开口40-4和支撑导管16的导管内腔16-3限定的连续通道42中,其中超声导管20的导管近侧部分20-1靠近中空马达轴40的近侧端40-1。连续通道42例如在尺寸和形状方面被构造成使得,通过手动操纵超声导管20的导管近侧部分20-1,超声导管20可例如纵向地在连续通道42中自由运动,使得超声导管20的导管远侧部分20-2可以从支撑导管16的远侧端部分16-6向远侧延伸。
27.马达控制器28电联接到马达26。例如,马达控制器28可以通过电线44电连接到马达26。马达控制器28被构造成例如通过硬布线逻辑或可编程逻辑来控制马达26,以便使中
1、安装特征64-2和安装特征64-3,它们(例如,在尺寸、形状和功能方面)被构造成分别可释放地连接到插入模块壳体24的安装特征38-1、安装特征38-2和安装特征38-3。
36.在一个实施例中,例如,插入模块壳体24的多个安装特征38和装置壳体58的多个安装特征64可以被构造和布置成通过磁引力联接在一起。在一种实施方式中,例如,插入模块壳体24的多个安装特征38和装置壳体58的多个安装特征64中的每一个的相对配对的安装特征(例如,安装特征38-1与安装特征64-1配对)可以是磁体,使得磁引力通过北极/南极磁性布置实现,以便促进超声装置54的装置壳体58磁联接到血管装置插入设备12的插入模块壳体24。在另一种实施方式中,例如,相对配对的安装特征(例如,安装特征38-1与安装特征64-1配对)中的安装特征之一可以是磁性的,而另一个是(或包括)磁性材料、例如铁,以便促进超声装置54的装置壳体58磁联接到血管装置插入设备12的插入模块壳体24。
37.当装置壳体58运动到与插入模块壳体24接合时,超声导管20在连续通道42中纵向运动,例如通过中空马达轴40的细长开口40-4和支撑导管16的导管内腔16-3,沿远侧方向36纵向运动。在连续通道42中包括导丝18的实施例中,导丝18可以被接收在超声导管20的导丝内腔20-3(见图1)中,使得当超声导管20沿远侧方向36纵向运动时,超声导管20沿着导丝18向远侧运动通过连续通道42。
38.如图1中所描绘的,现在将关于将导丝18定位在患者的血管中的血管手术来描述血管装置插入设备12的操作。支撑导管16连接到马达26的中空马达轴40,以建立血管装置插入系统10的连续通道42。支撑导管16插入患者的血管中,随后将导丝18穿入(中空马达轴40的)细长开口40-4中,该细长开口形成血管装置插入系统10的连续通道42的初始部分。然后马达26由马达控制器28致动,从而马达26的中空马达轴40和支撑导管16(包括支撑导管16的柔性细长构件16-2的远侧端部分16-6)一致地旋转振荡,以帮助将支撑导管16向远侧推进穿过血管到达血管闭塞部位。可选地,马达26和支撑导管16也可以通过滑动器30单独或与旋转振荡组合地纵向移位,例如往复运动。当马达26的中空马达轴40和支撑导管16旋转振荡时,导丝18由医生手动操纵和推进通过由在中空马达轴40中的细长开口40-4和支撑导管16的导管内腔16-3形成的连续通道42,并且导丝18的第二端18-2被推进到与血管中的血管闭塞部接合。支撑导管16的柔性细长构件16-2的远侧端部分16-6的旋转振荡和/或纵向往复运动帮助医生进一步推进导丝18的第二端18-2以经过并延伸超过血管中的血管闭塞部(部分或全部)。
39.参照图1和2,在导丝18被放置在患者血管中的期望位置之后,然后导丝18的第一端18-1可以穿入并通过超声装置54的超声导管20的导丝内腔20-3,使得当超声导管20沿远侧方向36纵向运动时,超声导管20可以沿着导丝18向远侧推进通过连续通道42。然后超声信号发生器52可以被激活,以将超声激励信号发送到超声换能器60。超声换能器60接收超声激励信号并将其转换成超声振动能量,该超声振动能量进而被提供给超声导管20的芯线20-4(见图1),从而将振动能量传递给工作头20-5,该工作头接合血管闭塞部的近侧端帽并钻入该近侧端帽中。
40.虽然在上面的一些示例和实施例中,就帮助将导丝18插入到血管中的期望位置以便例如引导血管导管、例如超声导管20的定位而言,血管装置插入设备12的结构和操作已被描述,但应当理解,在一些手术中,如果需要的话,血管装置插入设备12可以用于帮助将血管导管直接插入到血管中的期望位置而不使用导丝18。
41.以下项目也涉及本发明:
42.在一种形式中,本发明涉及一种血管装置插入系统,该血管装置插入系统可以被构造成在血管中推进支撑导管以促进辅助装置、例如导丝和/或超声导管的定位。该系统可以包括支撑导管,该支撑导管具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。支撑导管可以沿纵向轴线布置。该系统还可以包括插入模块壳体,该插入模块壳体可以(被构造成)容纳马达,该马达具有沿纵向轴线布置的中空马达轴。换言之,该系统可以包括马达。中空马达轴具有近侧端、远侧端、远侧端部分和可沿纵向轴线从近侧端延伸到远侧端的细长开口。中空马达轴的远侧端部分可以被构造成例如以直接连接的方式联接到支撑导管的座部。中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。马达控制器可以电联接到马达。马达控制器可以被构造成控制马达以使中空马达轴绕纵向轴线旋转振荡并进而使支撑导管旋转振荡。因此,该系统被构造成使得马达可以(被构造成)使中空马达轴绕纵向轴线旋转振荡并且进而使支撑导管旋转振荡。换言之,中空马达轴和支撑导管可以(被构造成)通过马达围绕(共同的)纵向轴线一致地旋转振荡。
43.在一些实施例中,滑动器可以联接到马达。滑动器可以被构造成使马达沿纵向轴线纵向往复运动。
44.在一些实施例中,该系统可以被构造成促进导丝的定位。导丝具有第一端和第二端。导丝可以定位在由在中空马达轴中的细长开口和支撑导管的导管内腔限定的连续通道中,其中导丝的第一端部分可以靠近中空马达轴的近侧端。连续通道可以被构造成使得导丝可以在连续通道中手动运动以从支撑导管向远侧延伸。
45.在一些实施例中,该系统可以包括具有导管近侧部分和导管远侧部分的超声导管。超声导管可以定位在由在中空马达轴中的细长开口和支撑导管的导管内腔限定的连续通道中,其中超声导管的导管近侧部分可以靠近中空马达轴的近侧端。连续通道可被构造成使得超声导管可在连续通道中运动以从支撑导管向远侧延伸。
46.在包括超声导管的实施例中,超声导管可以包括构造成接收导丝的导丝内腔。
47.在一些实施例中,该系统可以包括超声装置。超声装置可包括超声换能器、构造成容纳超声换能器的装置壳体、以及具有导管近侧部分和导管远侧部分的超声导管。导管近侧部分可操作地联接到超声换能器。连续通道可被构造成使得超声导管可在连续通道中运动以从支撑导管向远侧延伸。
48.在前一段的实施例中,超声导管可以具有构造成接收导丝的导丝内腔。该系统可以被构造成使得当超声导管在导丝上沿远侧方向运动时,超声导管可以被沿着导丝引导通过连续通道。
49.在包括插入模块壳体和装置壳体的实施例中,插入模块壳体可以包括多个第一安装特征并且装置壳体可以包括多个第二安装特征。多个第一安装特征可以被构造成可释放地连接到多个第二安装特征以将装置壳体安装到插入模块壳体。该系统可以被构造成使得多个第一安装特征可以被构造成可释放地连接到多个第二安装特征以将装置壳体安装到插入模块壳体。
50.在前一段的实施例中,插入模块壳体的多个第一安装特征和装置壳体的多个第二安装特征可以被构造成形成磁性连接,例如可以是磁性的。
51.在包括超声换能器作为系统的一部分的一些实施例中,系统可以包括可电联接到超声换能器的超声信号发生器。超声信号发生器可以被构造成向超声换能器提供电激励信号。
52.在另一种形式中,本发明涉及一种血管装置插入系统,其可以包括支撑导管,该支撑导管具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。插入模块壳体可以被构造成容纳马达,该马达具有沿纵向轴线布置的中空马达轴。中空马达轴具有近侧端、远侧端、远侧端部分和可沿纵向轴线从近侧端延伸到远侧端的细长开口。中空马达轴的远侧端部分可被构造成联接至支撑导管的座部。中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。导丝具有第一端和第二端,其中导丝可以定位在由在中空马达轴中的细长开口和支撑导管的导管内腔限定的连续通道中。导丝的第一端可以靠近中空马达轴的近侧端。连续通道可以被构造成使得通过手动操纵导丝的第一端部分,导丝可以在连续通道中自由手动运动。马达控制器可以电联接到马达。马达控制器可以被构造成使中空马达轴绕纵向轴线旋转振荡,以便进而使支撑导管旋转振荡。第[0042]段的特征也适用于本发明的这种形式。
[0053]
在一些实施例中,滑动器可以联接到马达,其中滑动器可以被构造成使马达沿纵向轴线纵向往复运动。
[0054]
在一些实施例中,该系统可包括超声装置,该超声装置可包括超声换能器、构造成容纳超声换能器的装置壳体、以及具有导管近侧部分、导管远侧部分和导丝内腔的超声导管。导管近侧部分可以可操作地联接到超声换能器。导丝内腔可被构造成接收导丝。该系统可以被构造成使得当超声导管纵向运动时,超声导管沿着导丝在连续通道中纵向运动。
[0055]
在具有插入模块壳体和装置壳体的任何实施例中,插入模块壳体可以包括多个第一安装特征并且装置壳体可以包括多个第二安装特征。多个第一安装特征可以被构造成可释放地连接到多个第二安装特征以将装置壳体安装到插入模块壳体。
[0056]
在根据前一段的实施例中,插入模块壳体的多个第一安装特征和装置壳体的多个第二安装特征可以被构造成形成磁性连接,例如可以是磁性的。
[0057]
在具有装置壳体的任何实施例中,装置壳体可以是构造成由用户握持的手持件。
[0058]
在包括超声换能器的任何实施例中,系统可以包括可电联接到超声换能器的超声信号发生器。超声信号发生器可以被构造成向超声换能器提供电激励信号。
[0059]
在另一种形式中,本发明涉及一种血管装置插入设备,该血管装置插入设备可以被构造成(用于)在血管中推进支撑导管和导丝。支撑导管可具有座部、从座部向远侧延伸的柔性细长构件、以及延伸穿过座部和柔性细长构件的导管内腔。血管装置插入设备可以包括插入模块壳体,该插入模块壳体被构造成容纳马达,该马达具有沿纵向轴线布置的中空马达轴。中空马达轴可以具有近侧端、远侧端、远侧端部分和可沿纵向轴线从近侧端延伸到远侧端的细长开口。中空马达轴的远侧端部分可被构造成联接到支撑导管的座部,其中中空马达轴的细长开口和支撑导管的导管内腔共同限定连续通道。连续通道可被构造成接收导丝。马达控制器可以电联接到马达。马达控制器可以被构造成使中空马达轴绕纵向轴线旋转振荡,以便进而使支撑导管旋转振荡。本发明的这种形式致力于第[0042]段的血管装置插入系统,其中连续通道可以被构造成接收导丝。第[0042]至[0051]段的特征也适用于本发明的这种形式。
[0060]
在一些实施例中,滑动器可以联接到马达。滑动器可以被构造成使马达沿纵向轴线纵向往复运动。
[0061]
在任何实施例中,插入模块壳体可以可选地包括多个安装特征,其被构造成安装到超声换能器的装置壳体。
[0062]
如本文所用,程度词是相对修饰语,其旨在指示与如此修饰的特性偏离的允许变化。此类术语并非旨在限于其所修改的特性的绝对值,而是具有比相反特性更多的物理或功能特性。
[0063]
虽然已经针对至少一个实施例描述了本发明,但是在本公开的精神和范围内可以进一步修改本发明。因此,本技术旨在涵盖使用其一般原理的本发明的任何变化、使用或改变。此外,本技术旨在涵盖属于本发明所属领域的已知或惯例实践并且落入所附权利要求的限制内的与本公开的偏离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1