社会空间盲人智能出行辅助系统及方法
1.本发明涉及智能导航技术领域,是一种社会空间盲人智能出行辅助系统及方法。
背景技术:
2.由于视觉障碍,迫使盲人群体形成了不同于明眼人的感知世界和传达信息的沟通模式。盲人出行时无法辨清方向,且在出行的过程中担心被障碍物撞到。
3.现有辅助盲人日常出行的工具主要包括导盲犬和导盲杖。导盲犬培训成本高、数量少、很难广泛推广。导盲杖可以探路,但是盲人的行走方向,道路的识别及目的地的导航却无法准确实现。盲道对行走本身而言,盲人和非盲人均不方便,而且在十字路口时普通的盲道会出现盲点,容易使盲人过马路无所适从。现有的,智能盲杖、智能盲道等虽具有一定的指引功能,但是技术系统分离,功能单一,无法合理智能的优化路径。
技术实现要素:
4.本发明提供了一种社会空间盲人智能出行辅助系统及方法,克服了上述现有技术之不足,其能有效解决现有现有导盲工具存在的功能单一、无法规划路径的问题。
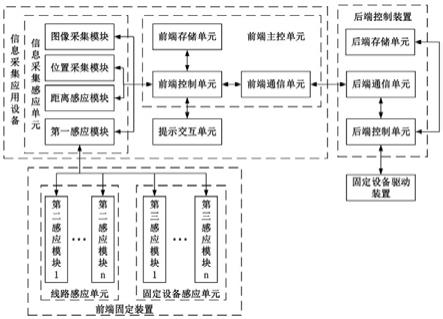
5.本发明的技术方案之一是通过以下措施来实现的:一种社会空间盲人智能出行辅助系统,包括:前端移动装置,包括穿戴设备和设置在穿戴设备上的信息采集应用设备,信息采集应用设备实时采集前端信息,且对其进行信息分析,根据分析结果对人员进行提示信息播报;其中前端信息包括图像信息、人员位置信息、阻碍信息、道路节点感应信息、固定设备感应信息;提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提示信息;前端固定装置,与信息采集应用设备感应通信,包括设置道路节点处的道路节点感应单元和设置在固定设备上的固定设备感应单元,道路节点感应单元用于提示道路节点,固定设备感应单元用于提示固定设备状态;后端控制装置,分别与信息采集应用设备和固定设备驱动装置通信,对信息采集应用设备回传的前端信息进行信息分析,识别人员前方环境情况,及通过固定设备驱动装置控制固定设备动作。
6.下面是对上述发明技术方案的进一步优化或/和改进:上述信息采集应用设备包括信息采集感应单元、提示交互单元和前端主控单元;信息采集感应单元包括图像采集模块、位置采集模块、阻碍检测模块和第一感应模块,图像采集模块、位置采集模块和阻碍检测模块分别采集图像信息、人员位置信息和阻碍信息,第一感应模块分别与道路节点感应单元和固定设备感应单元感应通信,获取道路节点感应信息和固定设备感应信息;前端主控单元,用于对接收到的前端信息进行信息处理,输出提示信息,并将图像信息和固定设备感应信息回传至后端控制装置,其中信息处理包括线路规划分析、阻碍分析、道路节点分析,提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提
示信息;提示交互单元,与人员进行交互,用于识别人员的语音信息及对人员进行提示信息播报。
7.上述前端主控单元包括前端控制模块、前端存储模块和前端通信模块;前端存储模块,存储实时前端信息、预先设置的提示信息和离线地图;前端控制模块,根据接收到的前端信息进行信息处理,其中信息处理包括线路规划分析、阻碍分析、道路节点分析;前端通信模块,搭建前端控制模块与后端控制装置之间的通信链路。
8.上述道路感应单元包括多个第二感应模块,第二感应模块设置在道路节点处,信息采集应用设备与第二感应模块感应通信,获取道路节点感应信息。
9.上述固定设备感应单元包括多个第三感应模块,第三感应模块设置在固定设备上,信息采集应用设备与第三感应模块感应通信,获取固定设备感应信息,其中固定设备包括单元门、电梯。
10.上述后端控制装置包括后端通信单元、后端控制单元和后端存储单元;后端通信单元,搭建前端移动装置与后端控制单元之间的通信链路;后端控制单元,包括图像识别模块和固定设备控制单元;图像识别模块用于对接收到的图像信息进行分析,识别人员前方环境情况,环境情况包括固定设备情况、道路情况和红绿灯指示情况;固定设备控制单元用于根据对接收到的固定设备感应信息控制对应固定设备动作;后端存储单元,存储后端控制单元发送的信息。
11.本发明的技术方案之二是通过以下措施来实现的:一种社会空间盲人智能出行辅助方法,包括:信息采集应用设备获取人员的目标地址及人员位置信息,根据该信息进行线路规划,播报线路提示信息,指导人员前行;人员前行中,信息采集应用设备采集前端信息,前端信息包括图像信息、人员位置信息、阻碍信息、道路节点感应信息、固定设备感应信息;信息采集应用设备根据阻碍信息和道路节点感应信息,实时判断人员前方是否存在阻碍,及判断所到达的道路节点,结合规划的线路输出对应的提示信息;后端控制装置对接收到的图像信息进行分析,识别人员前方环境情况,并根据接收到的固定设备感应信息控制对应固定设备动作,信息采集应用设备根据后端控制装置的分析结果输出对应的提示信息,对人员进行安全导航;其中提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提示信息,环境情况包括固定设备情况、道路情况和红绿灯指示情况。
12.本发明实现了在社会空间中的一体化实时智能导盲,能有效实现出行路线规划、人员位置实时定位提示、道路提示、人员前方环境情况提示、固定设备按需控制等功能,通过多种功能让盲人出行不再依赖于盲道或借助他人帮助,解决盲人出行困难的问题,在增加盲人方便出行的同时保证盲人出行安全。
附图说明
13.附图1为本发明实施例1的电路结构示意图。
14.附图2为本发明实施例2的流程示意图。
具体实施方式
15.本发明不受下述实施例的限制,可根据本发明的技术方案与实际情况来确定具体的实施方式。
16.下面结合实施例及附图对本发明作进一步描述:实施例1,如附图1所示,本实施例公开了社会空间盲人智能出行辅助系统,包括:前端移动装置,包括穿戴设备和设置在穿戴设备上的信息采集应用设备,信息采集应用设备实时采集前端信息,且对其进行信息分析,根据分析结果对人员进行提示信息播报;其中前端信息包括图像信息、人员位置信息、阻碍信息、道路节点感应信息、固定设备感应信息;提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提示信息。
17.上穿戴设备可包括眼镜、鞋和手环,眼镜、鞋和手环内均可设有外部环境明亮感应模块、led灯、报警器、电池和usb充电接口或感应充电接口等,外部环境明亮感应模块检测外部环境的明亮度,根据明亮度信息采集应用设备控制led灯发光,从而在夜晚给其他车辆及行人以提示,保护人员的安全,报警器可为振动报警器或语音报警器,用于在特殊情况给予警示,usb充电接口或感应充电接口用于对电池进行充电;需要说明的是信息采集应用设备分别设置在穿戴设备上,其中眼镜可用于实时采集图像信息;鞋可用于采集阻碍信息和搭载通信网络,增强物联网;手环用于采集位置信息、阻碍信息、道路节点感应信息、固定设备感应信息。
18.前端固定装置,与信息采集应用设备感应通信,包括设置道路节点处的道路节点感应单元和设置在固定设备上的固定设备感应单元,道路节点感应单元用于提示道路节点,固定设备感应单元用于提示固定设备状态。
19.上述道路节点感应单元设置在道路节点处,道路节点包括十字路口、拐角,超市,医院,公共活动空间等,在这些道路节点设置道路节点感应单元后,信息采集应用设备可通过感应道路节点感应单元判断人员位于哪个道路节点处,便于信息采集应用设备输出相应的提示信息,并对人员进行提示信息播报,使人员安全通过。
20.上述固定设备感应单元设置在固定设备上,固定设备包括电梯、单元门等,信息采集应用设备通过与固定设备感应单元相互感应,确定人员是否接近固定设备,在接近固定设备时,使得后端控制装置及时根据采集到的固定设备感应信息控制固定设备进行相应动作。例如可在电梯口及电梯内均设置固定设备感应单元,当信息采集应用设备感应到位于电梯口的固定设备感应单元时,则向后端控制装置发送该固定设备感应信息,后端控制装置控制该电梯打开,信息采集应用设备提示人员进入电梯,在信息采集应用设备感应到位于电梯内的固定设备感应单元时,则向后端控制装置发送该固定设备感应信息,后端控制装置控制该电梯关闭。
21.后端控制装置,分别与信息采集应用设备和固定设备驱动装置通信,对信息采集应用设备回传的前端信息进行信息分析,识别人员前方环境情况,及通过固定设备驱动装置控制固定设备动作。后端控制装置可为设置在应用环境内的后端主控制室中计算机。
22.综上本发明公开了一种社会空间盲人智能出行辅助系统,实现了在社会空间中的一体化实时智能导盲,能有效实现出行路线规划、人员位置实时定位提示、道路提示、人员
前方环境情况提示、固定设备按需控制等功能,通过多种功能让盲人出行不再依赖于盲道或借助他人帮助,解决盲人出行困难的问题,在增加盲人方便出行的同时保证盲人出行安全。
23.可根据实际需要,对上述社会空间盲人智能出行辅助系统作进一步优化或/和改进:如附图1所示,所述信息采集应用设备包括信息采集感应单元、提示交互单元和前端主控单元;信息采集感应单元包括图像采集模块、位置采集模块、阻碍检测模块和第一感应模块,图像采集模块、位置采集模块和阻碍检测模块分别采集图像信息、人员位置信息和阻碍信息,第一感应模块分别与道路节点感应单元和固定设备感应单元感应通信,获取道路节点感应信息和固定设备感应信息;前端主控单元,用于对接收到的前端信息进行信息处理,输出提示信息,并将图像信息和固定设备感应信息回传至后端控制装置,其中信息处理包括线路规划分析、阻碍分析、道路节点分析,提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提示信息;提示交互单元,与人员进行交互,用于识别人员的语音信息及对人员进行提示信息播报。
24.上述图像采集模块可为微型摄像机,可设置眼镜上,采集人员前方的图像信息。位置采集模块可为北斗定位导航装置,可设置手环上,采集人员的实时人员位置信息。阻碍检测模块可为超声波测距模块,可设置鞋上,采集人员前方存在的可以阻碍物的阻碍信息。第一感应模块可为射频传感器,感应道路节点感应单元和固定设备感应单元。
25.上述前端主控单元进行线路规划分析时,预先存储有应用社会空间内的离线地图,根据提示交互单元获取人员的目标地址信息,并通过位置采集模块获取人员位置信息,从而在离线地图上完成线路规划,并通过位置采集模块进行实时导航,并由提示交互单元进行语音提示。当人员顺利到达目标地点时,前端主控单元可存储该线路信息,便于有重复目标地址时,直接调用,减小前端主控单元的处理时间。
26.上述前端主控单元进行阻碍分析时,获取阻碍检测模块采集的距离数据,将距离数据与设定的不同阈值进行比较,判断是否存在阻碍,确定人员与阻碍之间的距离,并输出提示信息,同时前端主控单元若判定人员与阻碍之间的距离很长,还可等待后端控制装置对于图像信息的分析结果,加以确定阻碍的类型,并输出提示信息。
27.上述前端主控单元进行道路节点分析时,获取第一感应模块感应到的道路节点感应信息,对其进行解析获取该道路节点感应信息中存储的道路节点信息(可包括道路节点类型),输出对应提示信息。例如前端主控单元解析到的道路节点信息为进入转弯处及弯角弧度,此时前端主控单元根据弯角弧度输出对应的转弯提示信息,指导人员安全转弯。
28.上述提示信息可预先存储在前端主控单元中,便于实时调用,增加反应速度,并且可通过后端控制装置或提示交互单元由总控人员或家人录入。
29.上述提示交互单元可包括耳机、语音识别器、功放等,用于与人员进行交互,即识别人员的语音信息,使得前端主控单元获取人员输出的信息,同时接收前端主控单元输出的提示信息,对人员进行提示信息播报,指导人员进行相应动作,例如行走过程中的阻碍提
示、停止提示、进门提示、进电梯提示、出电梯提示、周围人员提示、路过建筑及环境提示、时间提示、目标地点到达提示等等。故而通过交互增加人员的安全感。
30.如附图1所示,所述前端主控单元包括前端控制模块、前端存储模块和前端通信模块;前端存储模块,存储实时前端信息、预先设置的提示信息和离线地图;前端控制模块,根据接收到的前端信息进行信息处理,其中信息处理包括线路规划分析、阻碍分析、道路节点分析;前端通信模块,搭建前端控制模块与后端控制装置之间的通信链路。前端通信模块可为5g通信模块。
31.如附图1所示,所述道路感应单元包括多个第二感应模块,第二感应模块设置在道路节点处,信息采集应用设备与第二感应模块感应通信,获取道路节点感应信息。
32.上述第二感应模块可为射频感应模块,道路节点包括弯角、超市、医院、公共活动空间等,设置在不同道路节点处的第二感应模块均设置有不同的道路节点信息,道路节点信息包括该道路节点各种信息,例如弯角处的第二感应模块则包括弯角弧度、转弯后的道路名称及方向等;超市处的第二感应模块则包括超市名称、超市所在位置等。
33.如附图1所示,所述固定设备感应单元包括多个第三感应模块,第三感应模块设置在固定设备上,信息采集应用设备与第三感应模块感应通信,获取固定设备感应信息,其中固定设备包括单元门、电梯。
34.上述第三感应模块可为射频感应模块,设置在不同固定设备上的第三感应模块均设置有不同的固定设备信息。
35.如附图1所示,所述后端控制装置包括后端通信单元、后端控制单元和后端存储单元;后端通信单元,搭建前端移动装置与后端控制单元之间的通信链路;可为5g通信模块。
36.后端控制单元,包括图像识别模块和固定设备控制单元;图像识别模块用于对接收到的图像信息进行分析,识别人员前方环境情况,环境情况包括固定设备情况、道路情况和红绿灯指示情况;固定设备控制单元用于根据对接收到的固定设备感应信息控制对应固定设备动作;后端存储单元,存储后端控制单元发送的信息。后端存储单元还能对存储的信息进行分类整理,并与工作人员查看。
37.实施例2,如附图2所示,本实施例公开了一种社会空间盲人智能出行辅助方法,包括:s201,信息采集应用设备获取人员的目标地址及人员位置信息,根据该信息进行线路规划,根据规划线路进行实时导航,播报线路提示信息,指导人员前行;s202,人员前行中,信息采集应用设备采集前端信息,前端信息包括图像信息、人员位置信息、阻碍信息、道路节点感应信息、固定设备感应信息;s203,信息采集应用设备根据阻碍信息和道路节点感应信息,实时判断人员前方是否存在阻碍,及判断所到达的道路节点,结合规划的线路输出对应的提示信息;后端控制装置对接收到的图像信息进行分析,识别人员前方环境情况,并根据接收到的固定设备感
应信息控制对应固定设备动作,信息采集应用设备根据后端控制装置的分析结果输出对应的提示信息,对人员进行安全导航;其中提示信息包括位置提示信息、线路提示信息、阻碍提示信息、固定设备提示信息,环境情况包括固定设备情况、道路情况和红绿灯指示情况。
38.上述后端控制装置对接收到的图像信息进行分析,识别人员前方环境情况,包括:1、对图像进行预处理,预处理包括灰度化、二值化、光照补偿、图像差分、图像平滑、图像锐化、边缘检测、图像编码与压缩等处理;2、对图像进行分割,本发明可采用fcn图像分割,fcn图像分割是一种全卷积网络图像分割,将传统cnn中的全连接层转化成一个个的卷积层,可以接受任意大小的输入图像,而不用要求所有的训练图像和测试图像具有同样的尺寸并且避免了由于使用像素块而带来的重复存储和计算卷积的问题;3、对图像进行特征提取,这里选定需要的特征提取方式进行提取即可,例如hog特征提取算法;4、通过分类模型对图像特征进行分类,完成图像识别(可以识别图像中的阻碍物、红绿灯指示情况、盲道等),其中分类模型根据训练样本通过机器学习输出,同时,后端控制装置还可在空闲时间对接收到的图像信息进行筛选,将筛选出的图像信息补充至训练样本,对分类模型进行训练,提高分类模型的识别精确度。
39.以上技术特征构成了本发明的最佳实施例,其具有较强的适应性和最佳实施效果,可根据实际需要增减非必要的技术特征,来满足不同情况的需求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1